Равноускоренное прямолинейное движение
Оглавление
ВВЕДЕНИЕ. 3
ОСНОВЫ КИНЕМАТИКИ.. 7
1. Основные понятия кинематики. 7
2. Относительность движения. Сложение скоростей. 14
3. Равномерное прямолинейное движение. 16
4. Равноускоренное прямолинейное движение. 20
5. Свободное падение тел. Ускорение свободного падения. 24
6. Движение тела, брошенного вертикально. 26
7. Движение тела, брошенного горизонтально. 29
8. Движение тела, брошенного под углом к горизонту. 31
9. Движение тела по окружности с постоянной по модулю скоростью.. 34
10. Ускорение при движении тела по окружности с постоянной по модулю скоростью (центростремительное ускорение) 36
11. Вращательное движение абсолютно твердого тела вокруг неподвижной оси 38
МЕТОДИЧЕСКИЕ РЕКОМЕНДАЦИИ.. 41
ПРИМЕРЫ РЕШЕНИЯ ЗАДАЧ. 42
ВОПРОСЫ И ЗАДАНИЯ ДЛЯ САМОКОНТРОЛЯ.. 48
ПРИЛОЖЕНИЕ. 53
Тест. 53
Контрольная работа. 56
ЛИТЕРАТУРА.. 61
ВВЕДЕНИЕ
Данное учебное пособие имеет целью оказать учащимся помощь в систематизации, обобщении и углублении знаний по физике, освоении методов и приемов решения задач при подготовке к итоговой аттестации.
Содержание учебного пособия соответствует программе по физике для студентов первого курса, обучающихся по специальностям 151901 Технология машиностроения, 190631 Техническое обслуживание и ремонт автомобильного транспорта, 260807 Технология продукции общественного питания.
Данное пособие включает:
· перечень рассматриваемых вопросов;
· систематизированное изложение основного теоретического материала (ориентирует учащихся на усвоение понятий, законов, закономерностей и т.д.);
· вопросы и задания для самоконтроля (они подобраны и сформулированы так, чтобы учащиеся могли проверить уровень своих знаний и умений по теме; вопросы и задания постепенно усложняются, что требует от учащихся для ответа и решения глубокого понимания физических законов, явлений и процессов, привлечения знаний из различных разделов физики);
· методические рекомендации по решению задач (последовательность действий, которые необходимо выполнить при решении задач, - от анализа условия задачи (его краткой записи, выполнение рисунка, схемы, чертежа, поясняющих условие задачи) до анализа и оценки полученного ответа);
· примеры решения задач (на примере решения наиболее типовых задач демонстрируется процесс построения и использования алгоритма решения задач на основе методических рекомендаций).
В приложении приведены тест и вариант контрольной работы, которую учащиеся выполняют самостоятельно.
Раздел механики курса физики начинается с кинематики. Эта дань традиции имеет исторические причины.
Механика была порождена деятельностью человека по механизации процессов производства. Пока люди не научились использовать энергию горючих ископаемых, центральную роль играли различные механизмы. И первой, естественно, была кинематика механизмов. Основная проблема здесь — преобразование вращательного движения в поступательное. Первые книги о механизмах появляются в XV в., их число постепенно увеличивается. В середине XVIII в. создается теоретическая база. Французский ученый Жан Даламбер (1717—1783) в своей книге «Динамика» (1743) высказывает мысль, что механику надо изучать с движения как такового. Эту мысль развивает петербургский академик Леонард Эйлер (1707—1783) в знаменитой «Теории движения твердых тел». Он считает целесообразным разделить исследование движения твердого тела на две части: геометрическую и механическую, Перемещение точек тела надо исследовать, не рассматривая причин движения, для получения аналитических формул, определяющих перемещение. Выделяется, таким образом, чисто геометрический аспект проблемы, и это, естественно, дает методические преимущества, упрощая подходы и поиски решения.
Еще более определенно идея выделения кинематики сформулирована выдающимся деятелем Великой французской революции Л. Карно (1758—1823). Он писал: «Геометрия могла бы включить в себя движения, не связываемые с взаимодействием тел, ибо механика, собственно говоря, не наука о движении, а наука о сообщении движения... Не движение само по себе является предметом механики, а эффект видоизменений, которым оно подвергается».
Наконец, у великого французского ученого Андре Мари Ампера (1775—1836) появляется понятие «кинематика»: «Наука, которая рассматривает сами по себе движения, наблюдаемые нами в окружающих телах и, особенно, в устройствах, называемых машинами, я называю кинематикой...».
В «Опыте философии наук» Ампер утверждает, что кинематика должна быть и частью теоретической механики, и прикладной дисциплиной, в которой изучаются разнообразные механизмы.
Интересен его пример в обосновании дидактической ценности кинематики: «Чтобы составить себе ясное представление о том зубчатом зацеплении, с помощью которого минутная стрелка часов делает двенадцать оборотов, тогда как часовая делает только один, надо ли заниматься силой, приводящей часы в движение? Разве действие зацепления, поскольку оно регулирует отношение скоростей этих двух стрелок, не остается тем же, когда движение вызывается какой-либо силой, отличною от силы обычного двигателя, например, когда мы поворачиваем стрелку пальцем?»
Впервые раздел кинематики был четко выделен в курсе «Физической и экспериментальной механики» генералаПонселе, который читал его в Парижском университете с 1837 по 1848 г. Здесь рассматривались виды движений, сложение движений, скоростей и ускорений и после этого различного типа механизмы.
В итоге кинематика выделилась в качестве раздела теоретической механики. Но по традиции она осталась в курсах физики как вводная часть к динамике Ньютона и Эйнштейна. В кинематике два аспекта: теоретический и прикладной. Содержанием первого является формирование понятий о механическом движении, системах отсчета, скорости, ускорении, правилах сложения скоростей и ускорений. В прикладном аспекте рассматривались механизмы, преобразующие движения.
ОСНОВЫ КИНЕМАТИКИ
Механическое движение. Относительность движения. Система отсчета. Материальная точка. Траектория. Путь и перемещение. Средняя скорость. Мгновенная скорость. Ускорение. Равномерное и равноускоренное прямолинейное движение. Сложение скоростей.
Графики зависимости кинематических величин от времени в равномерном и равноускоренном движении.
Свободное падение тел. Ускорение свободного падения. Движение тела, брошенного горизонтально. Движение тела, брошенного под углом к горизонту.
Движение тела по окружности с постоянной по модулю скоростью. Ускорение при движении тела по окружности с постоянной по модулю скоростью (центростремительное ускорение).
Основные понятия кинематики
Кинематика — раздел механики, изучающий движение тел без учета причин, вызвавших это движение.
Основной задачей кинематики является нахождение положения тела в любой момент времени, если известны его положение, скорость и ускорение в начальный момент времени.
Механическое движение — это изменение положения тел (или частей тела) относительно друг друга в пространстве с течением времени.
Для описания механического движения надо выбрать систему отсчета.
Тело отсчета — тело (или группа тел), принимаемое в данном случае за неподвижное, относительно которого рассматривается движение других тел.
Система отсчета — это система координат, связанная с телом отсчета, и выбранный способ измерения времени (рис. 1.1)
. 
Рисунок 1.1. Система отсчета
Положение тела можно определить с помощью радиус-вектора  или с помощью координат.
или с помощью координат.
Радиус-вектор точки М — направленный отрезок прямой, соединяющий начало отсчета Ос точкой М (рис. 1.2).
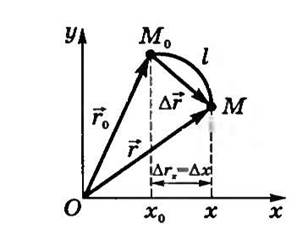
Рисунок 1.2. Радиус-вектор.
Координата х точки М — это проекция конца радиуса-вектора точки М на ось Ох. Обычно пользуются прямоугольной системой координат. В этом случае положение точки М на линии, плоскости и в пространстве определяют соответственно одним (х), двумя (х, у) и тремя (,х, у, z) числами — координатами (рис. 1.3).
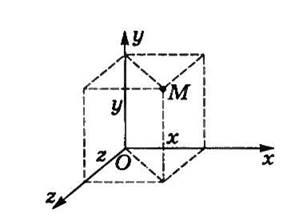
Рисунок 1.3. Координаты точки в прямоугольной системе координат.
В элементарном курсе физики изучают кинематику движения материальной точки.
Материальная точка — тело, размерами которого в данных условиях можно пренебречь.
Этой моделью пользуются в тех случаях, когда линейные размеры рассматриваемых тел много меньше всех прочих расстояний в данной задаче или когда тело движется поступательно.
Поступательным называется движение тела, при котором прямая, проходящая через любые две точки тела, перемещается, оставаясь параллельной самой себе. При поступательном движении все точки тела описывают одинаковые траектории и в любой момент времени имеют одинаковые скорости и ускорения. Поэтому для описания такого движения тела достаточно описать движение его одной произвольной точки.
В дальнейшем под словом "тело" будем понимать "материальная точка".
Линия, которую описывает движущееся тело в определенной системе отсчета, называется траекторией. На практике форму траектории задают с помощью математических формул (у=f(х) — уравнение траектории) или изображают на рисунке. Вид траектории зависит от выбора системы отсчета. Например, траекторией тела, свободно падающего в вагоне, который движется равномерно и прямолинейно, является прямая вертикальная линия в системе отсчета, связанной с вагоном, и парабола в системе отсчета, связанной с Землей.
В зависимости от вида траектории различают прямолинейное и криволинейное движение.
Путьs — скалярная физическая величина, определяемая длиной траектории, описанной телом за некоторый промежуток времени. Путь всегда положителен: s> 0.
Перемещение  тела за определенный промежуток времени — направленный отрезок прямой, соединяющий начальное (точка М0) и конечное (точка М) положение тела (см. рис. 1.2):
тела за определенный промежуток времени — направленный отрезок прямой, соединяющий начальное (точка М0) и конечное (точка М) положение тела (см. рис. 1.2):
 ,
,
где и  — радиус-векторы тела в эти моменты времени.
— радиус-векторы тела в эти моменты времени.
Проекция перемещения на осьОх:Δrx =Δх = х-х0, где x0 иx — координаты тела в начальный и конечный моменты времени.
Модуль перемещения не может быть больше пути:
│ │≤s.
Знак равенства относится к случаю прямолинейного движения, если направление движения не изменяется.
Зная перемещение и начальное положение тела, можно найти его положение в момент времени t:

Скорость — мера механического состояния тела. Она характеризует быстроту изменения положения тела относительно данной системы отсчета и является векторной физической величиной.
Средняя скорость <  > — векторная физическая величина, численно равная отношению перемещения к промежутку времени, за который оно произошло, и направленная вдоль перемещения (рис. 1.4):
> — векторная физическая величина, численно равная отношению перемещения к промежутку времени, за который оно произошло, и направленная вдоль перемещения (рис. 1.4):
 (1.1)
(1.1)
В СИ единицей скорости является метр в секунду  .
.

Рисунок 1.4. Направление средней и мгновенной скоростей.
Средняя скорость, найденная по формуле (1.1), характеризует движение только на том участке траектории, для которого она определена. На другом участке траектории она может быть другой.
Иногда пользуются средней скоростью пути:
 —
—
где s – путь, пройденный за промежуток времени Δt. Средняя скорость пути — это скалярная величина.
Мгновенная скорость  тела — скорость тела в данный момент времени (или в данной точке траектории). Она равна пределу, к которому стремится средняя скорость за бесконечно малый промежуток времени
тела — скорость тела в данный момент времени (или в данной точке траектории). Она равна пределу, к которому стремится средняя скорость за бесконечно малый промежуток времени
 .
.
Здесь  — производная от радиус-вектора по времени.
— производная от радиус-вектора по времени.
В проекции на ось Ох:

Мгновенная скорость тела направлена по касательной к траектории в каждой ее точке в сторону движения (см. рис. 1.4).
Ускорение — векторная физическая величина, характеризующая быстроту изменения скорости. Оно показывает, на какую величину изменяется скорость тела за единицу времени.
Среднее ускорение — физическая величина, численно равная отношению изменения скорости ко времени, за которое оно произошло:

Вектор  направлен параллельно вектору изменения скорости
направлен параллельно вектору изменения скорости  (
(  )в сторону вогнутости траектории (рис. 1.5).
)в сторону вогнутости траектории (рис. 1.5).
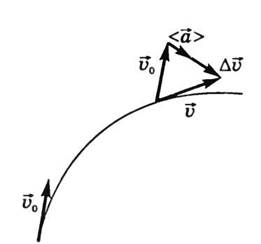
Рисунок 1.5. Среднее ускорение.
Мгновенное ускорение:

В СИ единицей ускорения является метр на секунду в квадрате  .
.
В общем случае мгновенное ускорение направлено под углом к скорости. Зная траекторию, можно определить направление скорости, но не ускорения. Направление ускорения определяется направлением равнодействующей сил, действующих на тело.
При прямолинейном движении с возрастающей по модулю скоростью(рис. 1.6,а) векторы  и
и  сонаправлены (
сонаправлены (  ) и проекция ускорения на направление движения положительна.
) и проекция ускорения на направление движения положительна.
При прямолинейном движении с убывающей по модулю скоростью(рис. 1.6, б) направления векторов и противоположны (  ) и проекция ускорения на направление движения отрицательна.
) и проекция ускорения на направление движения отрицательна.

Рисунок 1.6. а) ускоренное движение, б) замедленное движение
Вектор при криволинейном движении можно разложить на две составляющие, направленные вдоль скорости  и перпендикулярно скорости
и перпендикулярно скорости  (рис. 1.7), — тангенциальное ускорение, характеризующее быстроту изменения модуля скорости при криволинейном движении, — нормальное ускорение, характеризующее быстроту изменения направления вектора скорости при криволинейном движении.
(рис. 1.7), — тангенциальное ускорение, характеризующее быстроту изменения модуля скорости при криволинейном движении, — нормальное ускорение, характеризующее быстроту изменения направления вектора скорости при криволинейном движении.
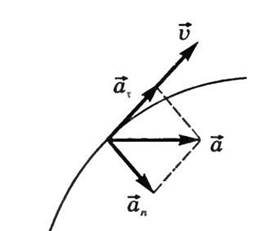
Рисунок 1.7. Разложение мгновенного ускорения на составляющие.
Модуль ускорения
 .
.
2. Относительность движения. Сложение скоростей
Как отмечалось выше, для описания движения тела необходимо выбрать тело отсчета и связать с ним систему координат. В качестве тела отсчета может выступать любое тело.
В разных системах отсчета будут различны вид траектории, значения скорости, перемещения и других величин. В этом и заключается относительность движения.
Пример. Человек идет по палубе парохода со скоростью  относительно парохода. Пароход движется поступательно со скоростью
относительно парохода. Пароход движется поступательно со скоростью  относительно берега. Найдем скорость человека относительно берега.
относительно берега. Найдем скорость человека относительно берега.
Свяжем неподвижную систему отсчета (хОу) с Землей, а подвижную (х'О'у') — с пароходом.
Из рисунка 2.1 видно, что перемещение
 (2.1)
(2.1)
где  — перемещение человека относительно парохода,
— перемещение человека относительно парохода,  — перемещение парохода относительно берега, — перемещение человека относительно берега.
— перемещение парохода относительно берега, — перемещение человека относительно берега.

Рисунок 2.1. Перемещение человека относительно парохода(х'О'у') и относительно берега (хОу)
Таким образом, если тело одновременно участвует в нескольких движениях, то результирующее перемещение точки равно векторной сумме перемещений, совершаемых ею в каждом из движений. В этом состоит установленный экспериментально принцип независимости движений.
Разделив уравнение (2.1) на промежуток времени, за который произошли перемещения человека и парохода, получим закон сложения скоростей:

Скорость  тела относительно неподвижной системы отсчета равна геометрической сумме скорости
тела относительно неподвижной системы отсчета равна геометрической сумме скорости  тела относительно подвижной системы отсчета и скорости
тела относительно подвижной системы отсчета и скорости  самой подвижной системы отсчета относительно неподвижной.
самой подвижной системы отсчета относительно неподвижной.
Закон сложения скоростей справедлив и для неравномерного движения, только в этом случае  — мгновенные скорости.
— мгновенные скорости.
Этот закон был установлен Г. Галилеем. Он справедлив только для движений со скоростями, намного меньшими скорости света с = 3•108 . Такие скорости в физике называют нерелятивистскими.
3. Равномерное прямолинейное движение
Равномерное прямолинейное движение — это движение, при котором тело за любые равные промежутки времени совершает равные перемещения, т. е. это движение с постоянной по модулю и направлению скоростью:
 — уравнение скорости,
— уравнение скорости,
 — уравнение ускорения.
— уравнение ускорения.
Пусть в момент времени t0= 0 координата тела х0, в моментt — х (рис. 3.1).
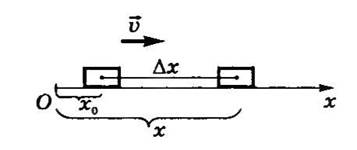
Рисунок 3.1. Перемещение тела при равномерном прямолинейном движении.
|
Δх = х - х0.
Следовательно, проекция скорости тела
 ,
,
следовательно,
x=x 0 + vxt— кинематическое уравнение равномерного движения (уравнение зависимости координаты от времени).
Проекция перемещения
Δrx=х-х0 =>
Δrx=vxt— уравнение перемещения.
При равномерном прямолинейном движении направление скорости не изменяется, поэтому путь
 .
.
Следовательно,
 — уравнениепути.
— уравнениепути.
Зависимость кинематических величин от времени можно изобразить графически.
|
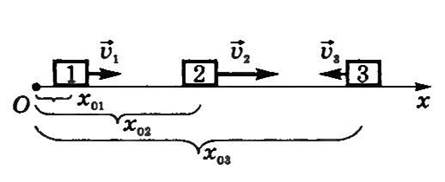
Рисунок 3.2. Схематическое изображение трех тел, движущихся вдоль оси х.
Тела 1, 2 движутся в положительномнаправлении оси Ох, причем  ; тело 3 движется в направлении, противоположном оси Ох; их начальные координаты соответственно
; тело 3 движется в направлении, противоположном оси Ох; их начальные координаты соответственно  ,
,  .
.
Графики скорости представлены на рисунке 3.3.
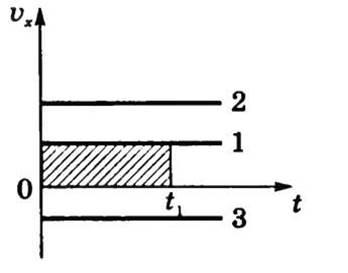
Рисунок 3.3. График зависимости проекции скорости от времени
Площадь заштрихованного прямоугольника численно равна пути s (модулю перемещения), пройденному телом 1 за время t1.
На рисунке 3.4 даны графики перемещения  .
.
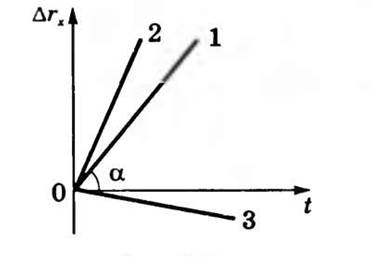
Рисунок 3.4. График зависимости проекции перемещения от времени.
На рисунке 3.5 — графики пути s=f(t)

Рисунок 3.5. График зависимости пути от времени.
Наклон графика ,к оси времени зависит от модуля скорости:
 .
.
Графики движения (зависимости координаты от времени) изображены на рисунке 3.6.

Рисунок 3.6. График зависимости координаты от времени.
С помощью графика движения можно определить:
1) координаты тела в любой момент времени;
2) путь, пройденный телом за некоторый промежуток времени;
3) время, за которое пройден какой-то путь;
4) кратчайшее расстояние между телами в любой момент времени;
5) момент и место встречи тел и др.
Равноускоренное прямолинейное движение
Равноускоренное прямолинейное движение — это движение, при котором скорость тела за любые равные промежутки времени изменяется одинаково, т. е. это движение с постоянным по модулю и направлению ускорением.
=сonst — уравнение ускорения.
По определению ускорения
 .
.
Пусть в момент времениt0скорость тела равна , в момент времениt — . Тогда за промежуток времениΔt=t-t0=tскорость изменилась на  . Следовательно, ускорение
. Следовательно, ускорение

 — уравнение скорости.
— уравнение скорости.
Или в проекциях:
 .
.
Эти зависимости кинематических величин от времени изобразим графически для трех тел (рис. 4.1).

Рисунок 4.1. Схематическое изображение трех тел, движущихся вдоль оси х.
Графики ускорения  представлены на рисунке 4.2, а графики скорости
представлены на рисунке 4.2, а графики скорости  — на рисунке 4.3.
— на рисунке 4.3.
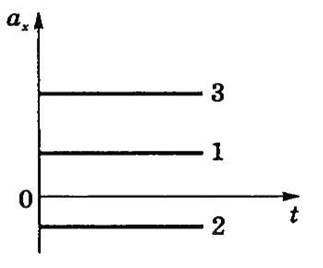
Рисунок 4.2. График зависимости проекции ускорения от времени.
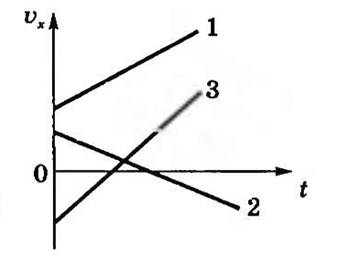
Рисунок 4.3. График зависимости проекции скорости от времени.
Для нахождения перемещения воспользуемся графиком скорости (рис. 4.4).
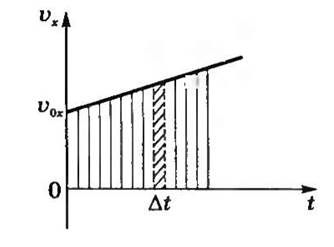
Рисунок 4.4. График зависимости проекции скорости от времени.
Для малого промежутка времени Δt изменением величины скорости можно пренебречь и скорость можно считать постоянной. Тогда перемещение за промежуток времени Δt будет равно площади узкой густо заштрихованной полоски. Мысленно разбив все время движения тела на малые промежутки времени и найдя перемещение за каждый отдельный промежуток времени, суммируем эти перемещения. Модуль проекции перемещения за промежуток времени Δt=t-t0=t в пределе численно равен площади заштрихованной трапеции.
Следовательно,
 (4.1)
(4.1)
Подставив значение
 в (4.1), получим:
в (4.1), получим:
 — уравнение перемещения в проекциях;
— уравнение перемещения в проекциях;
 — уравнение перемещения в векторном виде.
— уравнение перемещения в векторном виде.
Учитывая, что
х=х0+Δrх,
имеем:
 — кинематическое уравнение равноускоренного движения.
— кинематическое уравнение равноускоренного движения.
Его векторный вид:
Исключаяиз уравнений скорости и перемещения времяt, получим:
 .
.
Сравнивая выражение (4.1) с формулой
 , найдем:
, найдем:
 - проекция средней скоростипри равноускоренном движении.
- проекция средней скоростипри равноускоренном движении.
|

Рисунок 4.5. Графики зависимости проекции перемещения от времени.
5. Свободное падение тел. Ускорение свободного падения
Свободное падение — это движение тела под действием только силы тяжести.
На тело, падающее в воздухе, кроме силы тяжести действует сила сопротивления воздуха, следовательно, такое движение не является свободным падением. Свободное падение — это падение тел в вакууме.
Ускорение  , которое сообщает телу сила тяжести, называют ускорением свободного падения. Оно показывает, на какую величину изменяется скорость свободно падающего тела за единицу времени.
, которое сообщает телу сила тяжести, называют ускорением свободного падения. Оно показывает, на какую величину изменяется скорость свободно падающего тела за единицу времени.
Ускорение свободного падения направлено вертикально вниз.
Галилео Галилей установил (закон Галилея): все тела падают на поверхность Земли под действием земного притяжения при отсутствии сил сопротивления с одинаковым ускорением, т. е. ускорение свободного падения не зависит от массы тела.
Убедиться в этом можно, используя трубку Ньютона или стробоскопический метод.
Трубка Ньютона представляет собой стеклянную трубку длиной около 1 м, один конец которой запаян, а другой снабжен краном (рис. 5.1.).

Рисунок 5.1. Опыт Ньютона.
Поместим в трубку три разных предмета, например дробинку, пробку и птичье перо. Затем быстро перевернем трубку. Все три тела упадут на дно трубки, но в разное время: сначала дробинка, затем пробка и, наконец, перо. Но так падают тела в том случае, когда в трубке есть воздух (рис. 5.1, а). Стоит только воздух откачать насосом и снова перевернуть трубку, мы увидим, что все три тела упадут одновременно (рис. 5.1, б).
В земных условиях g зависит от географической широты местности.
Наибольшее значение оно имеет на полюсеg=9,81 м/с2 , наименьшее —на экватореg=9,75 м/с2. Причины этого:
1) суточное вращение Земливокруг своей оси;
2) отклонение формы Земли от сферической;
3) неоднородное распределение плотности земных пород.
Ускорение свободного падения зависит от высоты h тела над поверхностью планеты. Его, если пренебречь вращением планеты, можно рассчитать по формуле:

ГдеG — гравитационная постоянная, М — масса планеты,R — радиус планеты.
Как следует из последней формулы, с увеличением высоты подъема тела над поверхностью планеты ускорение свободного падения уменьшается. Если пренебречь вращением планеты, то на поверхности планеты радиусом R

Для небольших высот (g<<h) можно считать g=const, для таких высот свободное падение является равноускоренным движением. Для его описания можно использовать формулы равноускоренного движения:
 уравнение скорости.
уравнение скорости.
кинематическое уравнение, описывающее свободное падение тел:
 ,
,
 или в проекции на ось.
или в проекции на ось.
Дата добавления: 2021-03-18; просмотров: 111; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!