ОФОРМЛЕНИЕ РИСУНКОВ И ТАБЛИЦ В ВКР
 (пример оформления подраздела 1.2 по разделу 1 Сведения о судне и технически средствах судовождения )
(пример оформления подраздела 1.2 по разделу 1 Сведения о судне и технически средствах судовождения )
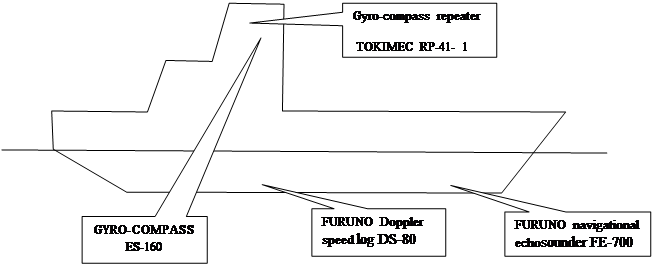
Технические средства судовождения
Рисунок 1.2.1 Схема размещения основных ТСС на судне
На схеме [Рис.1.2.1] не все технические средства судовождения в полном объеме могут быть отражены по данному судну. Поэтому остальные технические средства судовождения необходимо указать отдельно списком:
· GYRO-COMPASS ES-160
· Gyro-compass repeater TOKIMEC RP-41-1
· Gyro-compass repeater SPERRY MARINE
· Gyro compass azimuth circle TOKIMEC
· Magnetic compasses REFLECTA:- main / spare
· ECDIS 900, (p/s, Maris ID 1881)
· ECDIS 900, (st/s, Maris ID 1882)
· SEAPILOT 75
· FURUNO navigational echo sounder FE-700
· FURUNO Doppler speed log DS-80
· FURUNO UNIVERSAL AIS FA-150
· FURUNO marine RADAR/ARPA model FAR-21x7(-BB) Series (p/s)
· FURUNO marine RADAR/ARPA model FAR-21x7(-BB) Series (st/s)
· GPS NAVIGATOR FURUNO GP-150
· GPS NAVIGATOR FURUNO GP-90
· FURUNO VHF radiotelephone model FM-8800D/8800S (p/s)
· FURUNO VHF radiotelephone model FM-8800D/8800S (st/s)
· FURUNO SSB radiotelephone model FS-2570 (250W)
· FURUNO INMARSAT-C mobile earth station model FELCOM 15:Satcom 1 (no. 6313), Satcom 2 (no. 5627)
· Ship security alarm system SSAS (for Satcom No 5627)
· IRIDIUM SAILOR SC4000, Type SC 3150
· FURUNO NAVTEX receiver NX-700A/B
· FURUNO dual function facsimile receiver FAX-207
В таблице 1.2.1 приведены данные навигационных параметров и средне квадратических погрешностей основных технических средств судовождения исследуемого судна.
Таблица 1.2.1 – Навигационные параметры основных средств судовождения судна
| Средство судовождения |
|
| |||
| Гирокомпас ES-160 | Поправка Пеленг: Благоприятные условия Неблагоприятные условия | ± 0,5° - 1,0° ±0,6° - 0,9° ±1,2° - 2,0° | |||
| Магнитный компас REFLECTA | Поправка Пеленг: Благоприятные условия Неблагоприятные условия | ± 0,5° - 1,0° ±0,7° - 1,2° ±1,2° - 2,2° | |||
| Эхолот FE-700 | При Н < 20 м При Н < 50 м При Н > 50 м | ± 0,01% ± 0,03% ± 0,05% | |||
| Лаг Doppler speed log DS-80 | По скорости По расстоянию | ± 0.1 уз ± 0.09 | |||
| GPS NAVIGATOR GP-150 GP-90 | Точность определения стандартный дифференциальный | 30-50 м 1-5 м | |||
| РЛС FAR-21x7 | РЛ пеленг РЛ расстояние | ± 1.0° ±1% от D |
|
|
|
(Как оформлять приложения)
ПРИЛОЖЕНИЕ 1
Расчет точности определения места и точности счисления
Описание методики расчета точности ОМС и счисления, составления таблиц.
1. Использованные таблицы:
А) Таблица 4.1 Международные стандарты точности судовождения [14, с.391]
Б) Таблица 4.2 Отечественные нормативы точности судовождения [14, с.391]
В) Таблица 4.3 Среднестатистические погрешности основных навигационных параметров [14, с. 392]
Д) Таблица 4.13 Вероятность радиальной погрешности [14, с.406]
Г) Коэффициенты для расчета радиальной погрешности заданной вероятности [14, с. 407]
2. Использованные формулы :
1) Обсервованное место судна по двум пеленгам на два ориентира, мили[10, с.450]:
|
|
|
 ,
,
где  – СКП измерения пеленга (град);
– СКП измерения пеленга (град);
 – разность пеленгов на ориентиры (
– разность пеленгов на ориентиры (  );
);
 – расстояния от обсервованного места до первого и второго ориентиров (мили).
– расстояния от обсервованного места до первого и второго ориентиров (мили).
2) Обсервованное место по пеленгам на три ориентира, мили [10, с.450]:
 ,
,
где  - углы между пеленгами на ориентиры
- углы между пеленгами на ориентиры
3) Крюйс-пеленг, мили [10, с. 451]:
 ,
,
где  – СКП в определении места по двум пеленгам, мили;
– СКП в определении места по двум пеленгам, мили;
 – СКП в счислении за время между первым и вторым пеленгами (мили);
– СКП в счислении за время между первым и вторым пеленгами (мили);
θ – разность пеленгов (град);
4) Обсервованное место по пеленгу и расстоянию до одного ориентира, мили [10, с. 451]:

где  – СКП измерения пеленга (град);
– СКП измерения пеленга (град);
 – СКП измерения расстояния до ориентира (мили), D – расстояние до ориентира.
– СКП измерения расстояния до ориентира (мили), D – расстояние до ориентира.
5) Обсервованное место по расстояниям до двух ориентиров, мили [10, с. 451]:
 ,
,
где θ – угол между направлениями на ориентиры (град);
 – СКП измерения расстояний (мили).
– СКП измерения расстояний (мили).
6) Обсервованное место по расстояниям до трех ориентиров, мили [10, с. 451]:
 ,
,
где  – СКП измерения расстояния до ориентира (мили);
– СКП измерения расстояния до ориентира (мили);
θ – угол между направлениями на ориентиры (град.)
8) R о – радиальная погрешность обсервованного места судна с вероятностью 95%, мили [14, c.111]:
|
|
|
 ,
,
где  – коэффициент для расчета радиальной погрешности заданной вероятности, для вероятности Р 95% равен 1,73.
– коэффициент для расчета радиальной погрешности заданной вероятности, для вероятности Р 95% равен 1,73.
9) Среднеквадратическая погрешность счисления, при плавании по счислению менее 2 часов (мили) [10, с. 249]:
 ,
,
где Кс – коэффициент точности счисления, по условию задания равен 0,8 для прибрежного плавания.
10) Среднеквадратическая погрешность счисления, при плавании по счислению более 2 часов (мили):
 ,
,
где Кс - коэффициент точности счисления, по условию задания равен 1,2 для плавания в открытом море.
11) Радиальная (круговая) среднеквадратическая погрешность счислимого места, мили [10, с. 256]:
 ,
,
где  – рассчитанная по этой формуле имеет вероятность Р ≈ 0,68%.
– рассчитанная по этой формуле имеет вероятность Р ≈ 0,68%.
12) Предельная погрешность счислимого места с заданной вероятностью (Рзад) [10, с. 256]:
 ,
,
где  – коэффициент, выбираемый по вероятности Рзад из таблицы 4.13 [14], для вероятности Р 95% равен 1,74
– коэффициент, выбираемый по вероятности Рзад из таблицы 4.13 [14], для вероятности Р 95% равен 1,74
Таблица 5.1 - Расчет ожидаемой точности счисления
| № точки По таблице | ПУ, град. | S, мили | V, уз | t, ч | КС | Мс( t ), мили |  ,
мили ,
мили
| Примечания |
| 1 | 335,0 | 0,3 | 2,0 | 0.15 | 0,6 | 0,06 | 0,12 | |
| 2 | 313,0 | 0,45 | 6.0 | 0.08 | 0,6 | 0,03 | 0,06 | |
| 3 | 292,0 | 12,45 | 10,0 | 1,25 | 0,6 | 0,52 | 1,05 | |
| 4 | 315,0 | 1,45 | 08,0 | 0,18 | 0,6 | 0,07 | 0,14 | |
| 5 | 259,0 | 7,0 | 10,0 | 0,7 | 0,8 | 0,4 | 0,8 | |
| 6 | 292,0 | 1,58 | 10,0 | 0,16 | 0,8 | 0,09 | 0,18 | |
| 7 | 272,5 | 28,9 | 10,0 | 2,9 | 0,8 | 1,36 | 2,72 | |
| 8 | 293,6 | 3,4 | 10,0 | 0,33 | 0,8 | 0,18 | 0,36 | |
| 9 | 310,0 | 6,0 | 10,0 | 0.6 | 0,8 | 0,33 | 0,66 | |
| 10 | 285,0 | 15,8 | 10,0 | 1,58 | 0,8 | 0,88 | 1,7 | |
| 11 | 239,5 | 25,2 | 10,0 | 2,51 | 0,8 | 1,26 | 2,5 | |
| 12 | 279,0 | 14,3 | 10,0 | 1,43 | 0,8 | 0,8 | 1,6 | |
| 13 | 256,0 | 26,29 | 10,0 | 2,63 | 0,8 | 1,3 | 2,6 |
|
|
|
Дата добавления: 2020-12-22; просмотров: 64; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!