Кинетическая и потенциальная энергии
Группа 20ТР Физика ЛК – 3
Работа и энергия
Энергия, работа, мощность
Энергия — универсальная мера различных форм движения и взаимодействия. С различными формами движения материи связывают различные формы энергии: механическую, тепловую, электромагнитную, ядерную и др. В одних явлениях форма движения материи не изменяется (например, горячее тело нагревает холодное), в других — переходит в иную форму (например, в результате трения механическое движение превращается в тепловое). Однако существенно, что во всех случаях энергия, отданная (в той или иной форме) одним телом другому телу, равна энергии, полученной последним телом.
Изменение механического движения тела вызывается силами, действующими на него со стороны других тел. Чтобы количественно характеризовать процесс обмена энергией между взаимодействующими телами, в механике вводится понятие работы силы.
Если тело движется прямолинейно и на него действует постоянная сила F, которая составляет некоторый угол α с направлением перемещения, то работа этой силы равна произведению проекции силы Fs на направление перемещения (Fs = Fcos а), умноженной на перемещение точки приложения силы:
A = Fss = Fscosa. (11.1)
Сила может изменяться как по модулю, так и по направлению, поэтому в общем случае формулой (11.1) пользоваться нельзя. Если, однако, рассмотреть элементарное перемещение dr, то силу F можно считать постоянной, а движение точки ее приложения — прямолинейным. Элементарной работой силы F на перемещении dr называется скалярная величина
|
|
|
dА = Fdr = Fcosαds = Fsds,
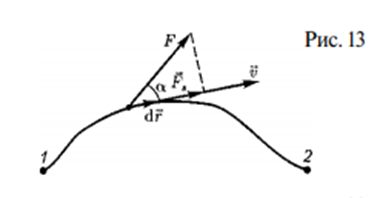
где α — угол между векторами F и dr; ds = |dr| — элементарный путь; Fs — проекция вектора F на вектор dr(рис. 13). Работа силы на участке траектории от точки 1 до точки 2 равна алгебраической сумме элементарных работ на отдельных бесконечно малых участках пути. Эта сумма приводится к интегралу

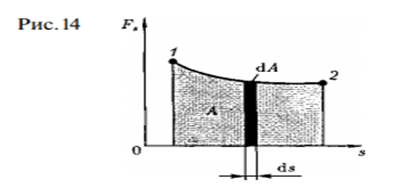
Для вычисления этого интеграла надо знать зависимость силы Fs от пути s вдоль траектории 1 — 2. Пусть эта зависимость представлена графически (рис. 14), тогда искомая работа А определяется на графике площадью затонированной фигуры. Если, например, тело движется прямолинейно, сила F= const и а = const, то получим
где s — путь, пройденный телом [см. также формулу (11.1)]. Из формулы (11.1) следует, что при α›π/2работа силы положительна, в этом случае составляющая Fs совпадает по направлению с вектором скорости движения V; (СМ. рис. 13). Если α>π/2—, то работа силы отрицательна. При α=π/2(сила направлена перпендикулярно перемещению) работа силы равна нулю.
Единица работы — Джоуль (Дж): 1 Дж — работа, совершаемая силой 1 Н на пути 1 м (1 Дж = 1 Н • м).
|
|
|
Чтобы охарактеризовать скорость совершения работы, вводят понятие мощности:

За время dt сила F совершает работу Fdr, и мощность, развиваемая этой силой, в данный момент времени
т.е. равна скалярному произведению вектора силы на вектор скорости, с которой движется точка приложения этой силы; N — величина скалярная.
Единица мощности — Ватт (Вт): 1 Вт — мощность, при которой за время 1 с совершается работа 1 Дж (1 Вт = = 1 Дж/с).
Кинетическая и потенциальная энергии
Кинетическая энергия механической системы — энергия механического движения этой системы. Сила F, действуя на покоящееся тело и вызывая его движение, совершает работу, а энергия движущегося тела возрастает на величину затраченной работы. Таким образом, работа dA силы F на пути, который тело прошло за время возрастания скорости от 0 до v, идет на увеличение кинетической энергии dТ тела, т.е.
dA = dT.
После некоторых преобразований (с учетом второго закона Ньютона) получаем, что тело массой m, движущееся со скоростью v, обладает кинетической энергией
Из формулы (12.1) видно, что кинетическая энергия зависит только от массы и скорости тела, т.е. кинетическая энергия системы есть функция состояния ее механического движения.
|
|
|
При выводе формулы (12.1) предполагалось, что движение рассматривается в инерциальной системе отсчета, так как иначе нельзя было бы использовать законы Ньютона. В разных инерциальных системах отсчета, движущихся друг относительно друга, скорость тела, а следовательно, и его кинетическая энергия будут неодинаковы. Таким образом, кинетическая энергия зависит от выбора системы отсчета.
Кинетическая энергия механической системы равна сумме кинетических энергий тел, входящих в систему.
Пусть взаимодействие тел осуществляется посредством силовых полей (например, поля упругих сил, поля гравитационных сил), характеризующихся тем, что работа, совершаемая действующими силами при перемещении тела из одного положения в другое, не зависит от того, по какой траектории это перемещение произошло, а зависит только от начального и конечного положений. Такие поля называются потенциальными, а силы, действующие в них, — консервативными. Если же работа, совершаемая силой, зависит от траектории перемещения тела из одной точки в другую, то такая сила называется диссипативной; ее примером является сила трения.
Тела, находясь в потенциальном поле сил, обладают потенциальной энергией П.Потенциальная энергия — механическая энергия системы тел, определяемая их взаимным расположением и характером сил взаимодействия между ними. Работа консервативных сил при элементарном (бесконечно малом) изменении конфигурации системы равна приращению потенциальной энергии, взятому со знаком «—» (работа совершается за счет убыли потенциальной энергии):
|
|
|
dA= -dП. (12.2)
Работа dA выражается как скалярное произведение силы F нa перемещение dr (см. § 11), и выражение (12.2) можно записать в виде
-dП. (12.3)
Следовательно, если известна функция П(г), то из формулы (12.3) можно найти силу F по модулю и направлению.
Согласно формуле (12.3), потенциальная энергия

где С — постоянная интегрирования, т. е. потенциальная энергия определяется с точностью до некоторой произвольной постоянной. Это, однако, не существенно, так как в физические соотношения входит или разность потенциальных энергий в двух точках, или производная функции П по координатам. Поэтому потенциальную энергию тела в каком-то определенном положении условно считают равной нулю (выбирают нулевой уровень отсчета), а потенциальную энергию тела в других положениях отсчитывают относительно нулевого уровня.
Потенциальная энергия системы является функцией состояния системы. Она зависит только от конфигурации системы и ее положения по отношению к внешним телам. Полная механическая энергия системы — энергия механического движения и взаимодействия: Е= Т+П , т. е. равна сумме кинетической и потенциальной энергий.
Дата добавления: 2020-12-22; просмотров: 103; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!