Естественные механические характеристики асинхронного двигателя
Механической характеристикой асинхронного двигателя называется зависимость развиваемого им момента от скольжения M = f(s) и зависимость частоты вращения ротора от развиваемого момента n2 = f(M).Механическая характеристика двигателя, полученная при номинальных (паспортных) напряжении и частоте сети при основной схеме включения его обмоток без включенных в их цепи дополнительных электротехнических элементов, является естественной. Если указанные условия не соблюдаются, то механическая характеристика будет искусственная.
Расчёт естественной механической характеристики асинхронного двигателя выполняется по формуле, представляющей собой аналитическую зависимость его электромагнитного момента от скольжения
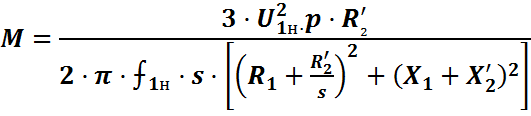
Где p – число пар полюсов обмотки статора.
Механическая характеристика асинхронного двигателя нелинейная, поэтому при выполнении этого пункта задания рекомендуется задаться значениями скольженияs = 0; 0,5sH; sH; 1,5sH; sK; 0,6; 0,8; 1,0 и определить соответствующий им электромагнитный момент.
Скольжению s = 0 соответствует режим идеального холостого хода электродвигателя‚ при работе в котором его частота вращения равна частоте вращения магнитного поля, т.е. синхронной частоте вращения
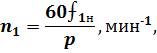
а электромагнитный момент равен М = О.
Скольжение асинхронного двигателя рассчитывается по формуле

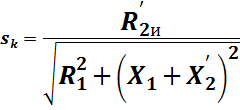
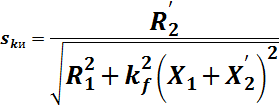
При расчёте номинального скольжения электродвигателя в ней принимается n2 = n2H. Критическое скольжение, при котором асинхронный двигатель развивает максимальный момент MK, зависит от параметров его обмоток:
|
|
|

Значению s = 1 соответствует пусковой режим электродвигателя, при котором его частота вращения равна n2 = 0, а развиваемый электромагнитный момент называется пусковым моментом Мп. Построение механической характеристики n2 = f(М) производится по данным, полученным при расчёте зависимости М = f(S) с помощью следующего соотношения:
n 2 = n 1 (1- s ).
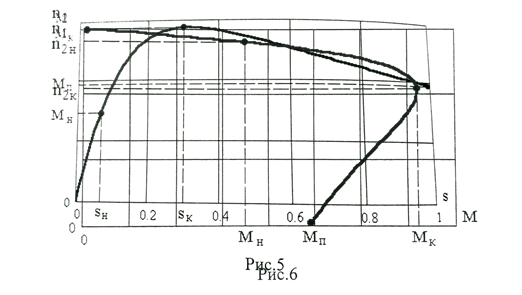 |
Примерный вид естественных механических характеристик асинхронного двигателя с указанием характерных точек показан на рис.5‚ 6. При оформлении домашнего задания они строятся совместно с искусственными механическими характеристиками.
3. Искусственные механические характеристики асинхронного двигателя
Особенности расчёта искусственных механических характеристик асинхронного двигателя состоятв следующем.
3..1При изменении напряжения питания критическое скольжение и соответствующая ему частота вращения асинхронного двигателя остаются такими же, как при его работе в естественном режиме. Электромагнитный
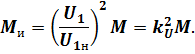
момент асинхронного двигателя, как следует из его математического выражения, прямо пропорционален напряжению питания во второй степени. Поэтому его значения М,. для построения искусственной механической характеристики можно определить по результатам расчёта естественной механической характеристики п.2 задания, используя следующее соотношение
|
|
|
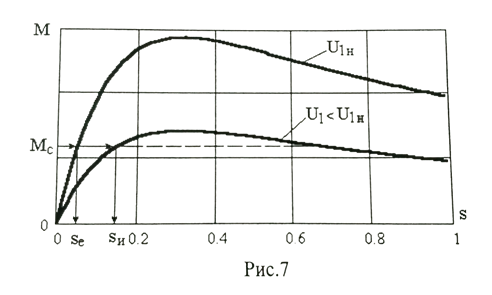 |
Механические характеристики при изменении напряжения питания асинхронного двигателя изображены на рис.7, 8.
 |
3.2 Увеличение активного сопротивления фазной обмотки ротора асинхронного двигателя до R2и’=kR2R2' приводит к пропорциональному возрастанию критического скольжения:
Электромагнитный момент двигателя при измененном активном
 |
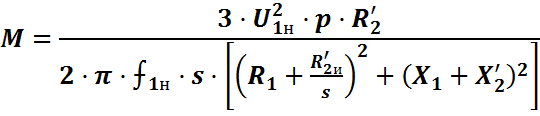
сопротивлении обмотки ротора рассчитывается по формуле:
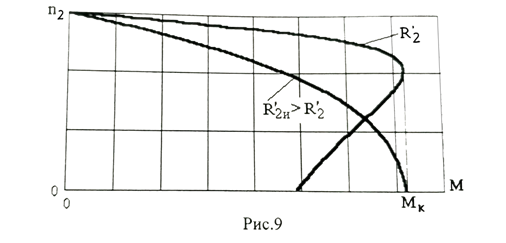
При расчете этой искусственной механической характеристики рекомендуется задаться значениями скольжения s=0; sн; 4sн; sки; 0,6; 0,8; 1,0. Влияние активного сопротивления фазных обмоток ротора на механическую характеристику асинхронного двигателя показано на рис. 9.
3.3. При регулировании частоты вращения асинхронного двигателя изменением частоты напряжения питания по закону U1/f1 = const его критическое скольжение находится из следующего выражения:
|
|
|
Т.е. с уменьшением частоты питающего напряжения критическое скольжение возрастает, а с увеличением частоты уменьшается.
Расчет электромагнитного момента двигателя производится с учетом того, что при рассматриваемом способе его регулирования

Т.е. ku=kf на основании этого выражение для электромагнитного момента асинхронного двигателя принимает следующий вид:
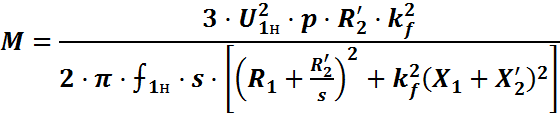
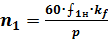
При расчете этой искусственной механической характеристики электронного двигателя рекомендуется задаться значениями скольжения s=0; sн; 1,5sн; sкн; 0,6; 0,8; 1,0. Частота вращения магнитного поля в двигателе зависит от частоты напряжения питания и будет равна
 ,
,
А частота вращения его ротора
Механические характеристики асинхронного двигателя при

рассматриваемом способе регулирования его частоты вращения изображены на рис. 10.

4. Рабочие характеристики асинхронного двигателя
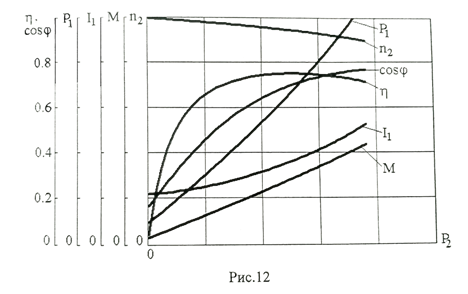
Рабочими характеристиками асинхронного двигателя называется графические изображения зависимостей n2, M, I1, cosφ, P1, n=f (P2) при U1 = const и f1 = const. При U1=U 1н и f1 = f1н эти характеристики являются естественными.
Расчет естественных рабочих характеристик асинхронного двигателя рекомендуется выполнить для значений скольжения s= sх; 0,5sн; sн; 1,5sн. При этом следует учесть, что соответствующие этим скольжениям значения электромагнитного момента М и частоты вращения n2 асинхронного двигателя, кроме значений этих параметров при его холостом ходе с s=sх, были рассчитаны ранее, в п.2 задания. Для определения значений других величин, входящих в состав рабочих характеристик двигателя, необходимо воспользоваться его Г- образной схемой замещения, изображенной на рис. 4. На основании первого закона Кирхгофа для этой схемы
|
|
|
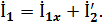
Токи в параллельных ветвях схемы замещения асинхронного двигателя рассчитываются по формулам:

Где I1ха, I1хр – активная и реактивная составляющие тока цепи намагничивания т.е. тока идеального холостого хода электродвигателя; I2а’, I2р’ – приведенные к обмотке статора активная и реактивная составляющие тока обмотки ротора электродвигателя.
В итоге фазный ток асинхронного двигателя будет равен

А его действующее значение
Коэффициент мощности асинхронного двигателя может быть определен по формуле

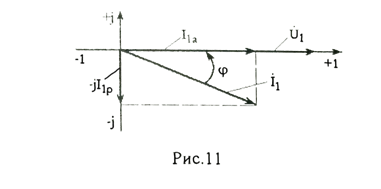 |
Правомерность применения этой формулы для расчета cosφ асинхронного двигателя поясняет векторная диаграмма фазных напряжения и тока на рис.11.
-*+Потребляема двигателем из сети мощность рассчитывается по формуле

А развиваемая им механическая мощность на основании схемы замещения будет равна
Где (I’2)2=(I’2a)2+(I’2p)2.
Для расчета коэффициента полезного действия (КПД) двигателя используется выражение:
Где P2 – полезная механическая мощность на валу двигателя; ΔP- мощность потерь в двигателе.
Потери мощности ΔP, возникающие в асинхронном двигателе при преобразовании электрической энергии в механическую, рассеиваются в нем и вызывают его нагрев. Они состоят из двух состоящих:

Где ΔPпер – переменные потери мощности в двигателе; ΔPпост – постоянные потери мощности в двигателе.
Переменные потери мощности зависят от нагрузки двигателя, т.е. от тока двигателя. В них входят мощность потерь в обмотке статора ΔPэ1, мощность потерь в обмотке ротора ΔPэ2 и мощность добавочных потерь ΔPд:

Из схемы замещения асинхронного двигателя (рис.4) следует:
 ,
,
 .
.
Добавочные потери мощности ΔPд возникают в обмотках двигателя и обусловлены зубчатостью статора и ротора, а также несинусоидальным распределением магнитной индукции в воздушном зазоре двигателя. Эти потери мощности пропорциональны квадрату фазного тока двигателя и составляют 0,5-2 % от номинальной мощности потерь ΔPд поэтому ими при расчете КПД асинхронного двигателя допустимо пренебречь.
К постоянным потерям мощности асинхронного двигателя, не изменяющимся от нагрузки, при U1=U1н и f1=f1н можно отнести мощность потерь в стали ΔPст и мощность механических потерь ΔPмех. Общая мощность этого вида потерь будет равна

Мощность ΔPст определяется в основном потерями из-за гистерезиса и вихревых токов в сердечнике статора, так как подобные потери мощности в сердечнике ротора в связи с малой частотой тока обмотки ротора f2 = 1 – 3 Гц рабочем режиме асинхронного двигателя пренебрежимо малы. Тогда на основании схемы замещения (рис.4) асинхронного двигателя

Мощность механических потерь ΔPмех обусловлена силами трения в подшипниках, ротора о воздух и вентиляционными потерями. Она определяется при номинальном режиме работы асинхронного двигателя. Для этого по вышеприведенным формулам при U1=U1н и s=sн с использованием параметров схемы замещения асинхронного двигателя в следующей последовательности рассчитываются I1х, I’2н, ΔPэ2н и ΔPст, затем по паспортным данным определяется номинальная потребляемая мощность асинхронного электродвигателя

И номинальную мощность потерь

В результате мощность механических потерь будет равна
 +
+ 
Полезная механическая мощность двигателя Р2 меньше развиваемой механической мощности Pмех на величину мощности механических потерь

Механическим потерями мощности ΔPмех в двигателе соответствует приложенный к его валу момент трения
 .
.
 |
Для преодоления момента трения Мтр асинхронный двигатель должен развивать равный ему электромагнитный момент. Поэтому скольжение асинхронного двигателя при работе в режиме реального холостого хода sх меньше 0. Значение скольжения sх, принимая во внимание, что при 0≤М≤ Мн зависимость скольжения асинхронного двигателя от его электромагнитного момента практически линейная, можно определить из соотношения

Где sр, Мр – скольжение и соответствующий ему электромагнитный момент асинхронного двигателя в опорной точке механической характеристики.
Выбор значения скольжения sр, по которому рассчитывается момент Мр, осуществляется в диапазоне 0,1sн≤sр≤0,5sн. При этом следует учесть, что меньшему значению sр соответствует более высокая точность расчета sх.
По полученным данным строятся графики, отражающие зависимости изменения рассчитанных показателей асинхронного двигателя от развиваемой им мощности Р2. Их примерный вид показан на рис. 12.
Из графиков рабочих характеристик асинхронного двигателя следует, что с увеличением нагрузки потребляемый им ток I1 возрастает. Увеличиваются также его коэффициент мощности cosφ и КПД n. Эти показатели асинхронного двигателя имеют максимум, который у коэффициента мощности cosφ достигается при Р2=Р2н. Максимальное значение КПД асинхронного двигателя, как иу трансформатора, при ΔPпост= ΔPпер. Это условие у асинхронных двигателей выполняется при нагрузках Р2=(0,65-0,85) Р2н
Дата добавления: 2020-11-29; просмотров: 264; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!