Принципиальная схема РМО с качанием частоты.
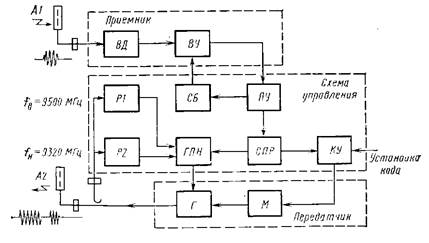
Блок схема РМО с качанием частоты ответного сигнала приведена рис. 29.
Зондирующие импульсы судовой РЛС через всенаправленную приёмную антенну (А1) поступают на вход приёмника, состоящего из видеодетектора (ВД) и видеоусилителя (ВУ). Усиленные сигналы с выхода приёмника подаются на пороговое устройство (ПУ). В случае превышения сигналом порогового уровня производится запуск кодирующего устройства (КУ). Иногда между пороговым и кодирующим устройствами ставится схема анализа регулярности следования импульсов запроса, которая повышает помехоустойчивость РМО. В кодирующем устройстве вырабатывается кодовая комбинация импульсов, соответствующая букве в кодах Морзе (здесь предусмотрена возможность смены кода).
|
Рис. 29. Схема РМО с качанием частоты
В соответствии с кодовой последовательностью запускается передатчик, состоящий из модулятора (М) и СВЧ-генератора (Г). Сигналы СВЧ через антенну А2 излучаются в пространство и достигают запрашивающей РЛС. Модулятор собран на мощных транзисторах, а в качестве СВЧ–генератора используются генераторы на диоде Ганна. Перестройка частоты генератора осуществляется с помощью варикаппа (диод, имеющий переменную паразитную емкость, зависящую от уровня напряжения, подводимого к нему), включенного в цепь генератора.
Необходимый режим качания частоты задается генератором пилообразного напряжения (ГПН), работающим в автоколебательном режиме. Управление его работой осуществляется схемой принятия решения (СПР), которая по заранее заданному алгоритму включает РМО в активный режим или переводит в режим ожидания. Контроль полосы излучаемых колебаний производится двумя резонаторами высокой добротности (Р1 и Р2). Резонаторы настроены на крайние частоты диапазона: Р1–на 9320 МГЦ, Р2–на 9500 МГц. Когда рабочая частота достигает частоты настройки одного из резонаторов, происходит изменение направления качания частоты сигнала.
|
|
|
Схема блокировки (СБ) вырабатывает импульсы, запирающие приёмник на время обработки запросного излучения и излучения ответного сигналов. Тем самым предотвращается самовозбуждение ответчика и искажение ответного сигнала запросными импульсами других РЛС.
РМО с фиксированной частотой ответа
Недостатки РМО с качанием частоты связаны с невозможностью освободиться от сигналов, когда надобность в них отпадает. Это устраняется при переходе на фиксированную частоту ответа, находящуюся вне полосы частот, отведенной для основной работы РЛС. Применение РМО с фиксированной частотой ответа обеспечивает:
раздельное и совместное наблюдение радиолокационных эхо–сигналов и сигналов ответчика на экране РЛС;
|
|
|
раздельную и совместную обработку этих сигналов на встроенных ЭВМ;
высокую степень опознавания;
высокую защищенность ответных сигналов от помех на основной частоте РЛС.
Для работы РМО-Ф в трехсантиметровом диапазоне волн выделена полоса частот 9300–9320 МГц. Эта полоса находится на краю диапазона частот, отведенного для судовых РЛС. Сделано это для того, чтобы при приёме сигналов от РМО-Ф мог быть использован антенно-волноводный тракт РЛС. Специальная приставка (дополнительный гетеродин) обеспечивает обработку сигналов в приёмнике РЛС.
В 1980 г. ММО рекомендовано использование РМО-Ф для обозначения характерных точек пологих берегов, навигационных ограждений, подходов к портам, береговых объектов. Такие ответчики разделены на два типа:
А–ближнего действия (до 10 миль);
В–дальнего действия (10–30 миль).
Выбор типа запрашиваемого маяка осуществляется автоматически в зависимости от используемой шкалы дальности. Это достигается селекцией зондирующих импульсов по длительности в приёмнике РМО–Ф. Структурная схема и принцип работы незначительно отличаются от РМО с качанием частоты (рис. 29).
Дата добавления: 2020-04-08; просмотров: 158; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!