Задача 4. Кинематический расчет плоского механизма
Вариант 12
Задача 1. Определение реакций опор тела, находящегося по действием произвольной плоской системы сил
Определить реакции опор тела  , находящегося в равновесии. На тело действуют сила
, находящегося в равновесии. На тело действуют сила  , равномерно распределенная нагрузка интенсивности
, равномерно распределенная нагрузка интенсивности  и пара сил с моментом
и пара сил с моментом  . В точке
. В точке  на нити, перекинутой через блок, подвешен груз весом
на нити, перекинутой через блок, подвешен груз весом  . Расчетные схемы представлены на рис. 2 (а, б, в). Исходные данные приведены в таблице 3. Линейные размеры даны в метрах. Вес тела не учитывать.
. Расчетные схемы представлены на рис. 2 (а, б, в). Исходные данные приведены в таблице 3. Линейные размеры даны в метрах. Вес тела не учитывать.
Исходные данные:  ,
,  ,
,  ,
,  .
.
Определить:  ,
,  ,
,  .
.
Решение
Объект равновесия – балка .
Действующие активные силы: , пара сил с моментом , равномерно распределенную нагрузку интенсивности заменяем сосредоточенной силой  , приложенной в середине отрезка, на который действует нагрузка,
, приложенной в середине отрезка, на который действует нагрузка,  .
.
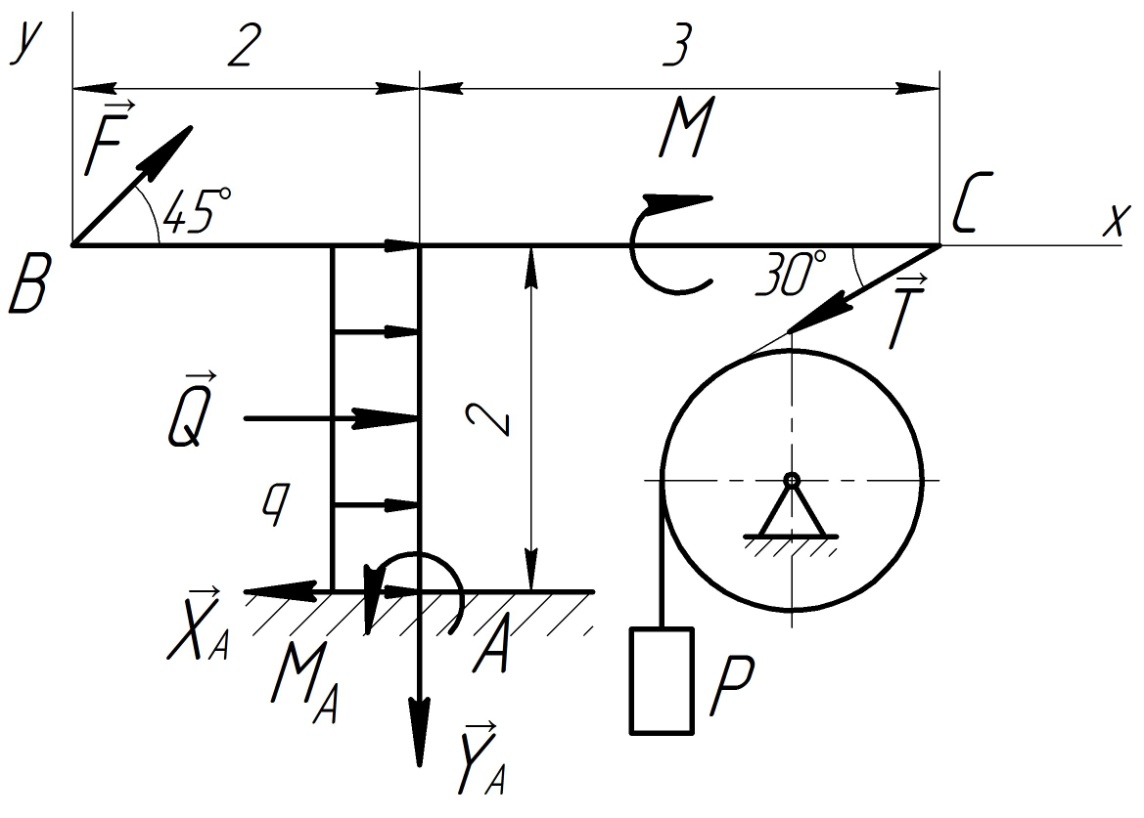
Рис. 1
Связи: жесткая заделка в точке  и нить в точке . Заменяем связи реакциями. Реакция жесткой заделки имеет составляющие
и нить в точке . Заменяем связи реакциями. Реакция жесткой заделки имеет составляющие  ,
,  и , реакция нити
и , реакция нити  направлена от тела по нити (
направлена от тела по нити (  ).
).
Выбираем систему координат (см. рис. 1) и составляем уравнения равновесия для произвольной плоской системы сил:

| (1) |

| (2) |


| (3) |
Из (1) найдем :

Из (2) найдем :

Из (3) найдем :


Ответ:  ,
,  ,
,  .
.
Задача 2. Определение реакций опор составной конструкции
Определить реакции внешних и внутренних связей находящейся в равновесии конструкции, состоящей из двух тел. Расчетные схемы представлены на рис. 5 (а, б, в), линейные размеры указаны в метрах. На конструкцию действуют силы и , распределенная нагрузка интенсивности и пара сил с моментом . Их значения приведены в таблице 4. Силы тяжести тел не учитывать.
Исходные данные:  ,
,  , , ,
, , ,  .
.
Определить: , ,  ,
,  ,
,  ,
,  .
.
Решение
Разделяем составную конструкцию по шарниру на два отдельных тела  и
и  (см. рис. 2 б, в).
(см. рис. 2 б, в).
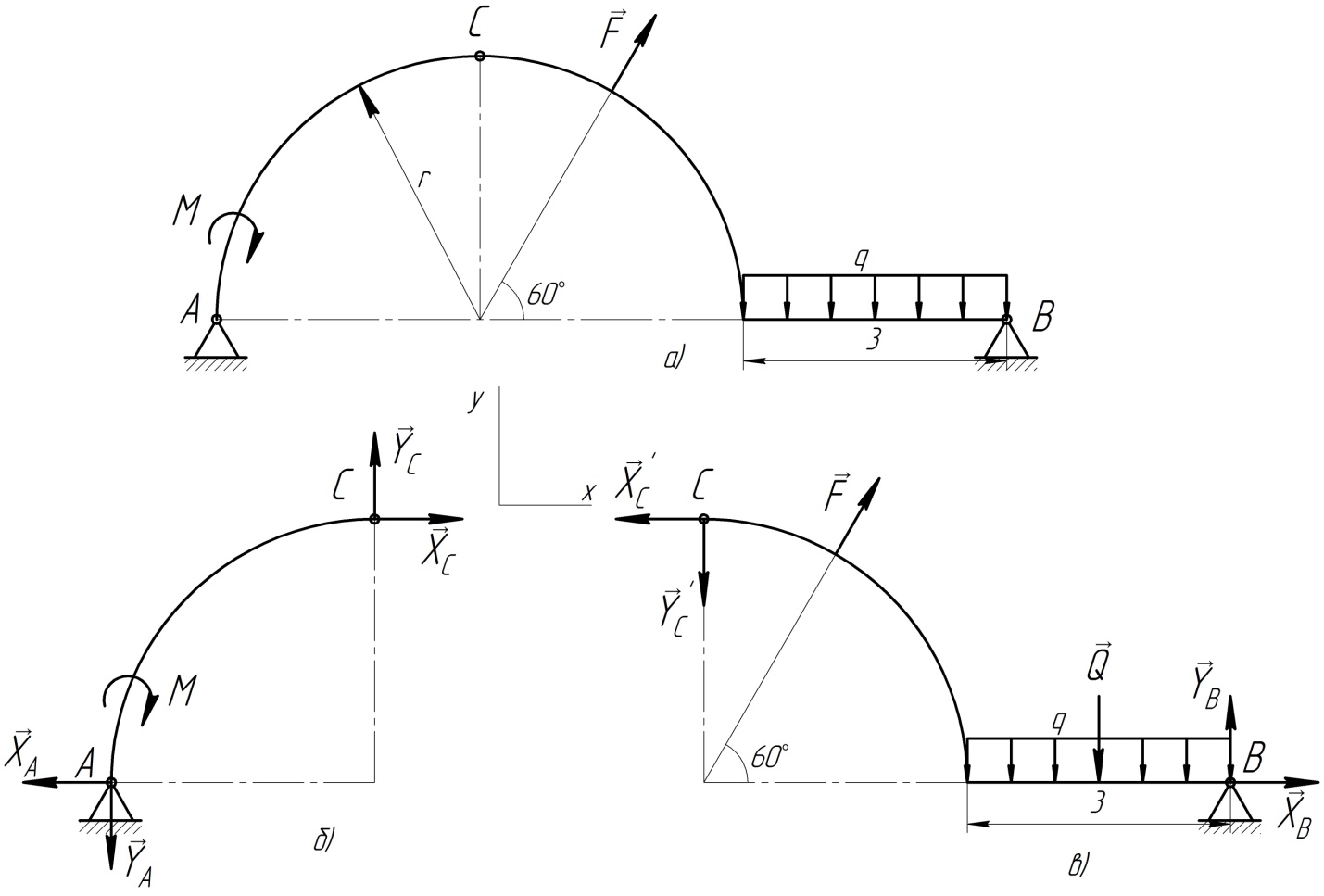
Рис. 2
На тело действует пара сил с моментом . На тело действуют сила и равномерно распределенная нагрузка интенсивности , которую заменяем сосредоточенной силой (  ).
).
Связями для тела являются шарнирно-неподвижная опора в точке и шарнир в точке . Заменяем связи реакциями: в точке – , , в точке –  ,
,  .
.
Связями для тела являются шарнир в точке и шарнирно-неподвижная опора в точке  . Заменяем связи реакциями: в точке –
. Заменяем связи реакциями: в точке –  ,
,  , в точке –
, в точке –  и
и  , причем
, причем  ,
,  .
.
Составляем уравнения равновесия.
Для тела (рис. 2, б):

| (1) |

| (2) |

| (3) |
Для тела  (рис. 2, в):
(рис. 2, в):

| (4) |

| (5) |


| (6) |
Из уравнения 3 выразим  и подставим в уравнение (6), получим:
и подставим в уравнение (6), получим:


откуда


Тогда

Из уравнения (1):

Из уравнения (2):

Из уравнения (4):

Из уравнения (5):

Ответ:  ,
,  ,
,  ,
,  ,
,  ,
,  .
.
Задача 3. Определение скоростей и ускорений точек твердого тела при поступательном и вращательном движениях
Механизм состоит из рейки 1, колес 2, 3, 4, находящихся в зацеплении или связанных ременной передачей (см. рис. 7 а, б, в). Исходные данные приведены в таблице 5. По заданному уравнению движения ведущего звена определить в момент времени  величины, указанные в последнем столбце таблицы 5. Считать, что движение происходит без скольжения.
величины, указанные в последнем столбце таблицы 5. Считать, что движение происходит без скольжения.
Исходные данные:  ,
,  ,
,  ,
,  ,
,  ,
,  .
.
Определить:  ,
,  ,
,  ,
,  .
.
Решение

Рис. 3
В данном механизме ведущим звеном является колесо 3. Поэтому решение задачи начинаем с определения угловой скорости колеса 3:

При  . Направление вращения
. Направление вращения  противоположно направлению
противоположно направлению  .
.
Так как колесо 2 находится в зацеплении с колесом 3, то

откуда угловая скорость колеса 2:

Так как колесо 2 находится в зацеплении с рейкой 1, то определяем скорость рейки 1:

При  ,
,  направлен в сторону вращения
направлен в сторону вращения  .
.
Определяем ускорение рейки 1:

При  ,
,  направлен как .
направлен как .
Колесо 3 связано ременной передачей с колесом 4, следовательно:

откуда угловая скорость колеса 4:

При 
Угловое ускорение колеса 4:

При  ,
,  направлено как
направлено как  .
.
Определяем скорость и ускорение точки при :

 направлен в сторону .
направлен в сторону .

где:  ,
,

 направлен в сторону ,
направлен в сторону ,  направлен к оси вращения колеса 4. Так как
направлен к оси вращения колеса 4. Так как  , то
, то

Ответ:  ,
,  ,
,  ,
,  .
.
Задача 4. Кинематический расчет плоского механизма
1) Определить скорости точек и , угловую скорость звена  и угловую скорость звена
и угловую скорость звена  (см. рис. 8 а, б, в согласно варианту) стержневого механизма. Исходные данные приведены в таблице 6.
(см. рис. 8 а, б, в согласно варианту) стержневого механизма. Исходные данные приведены в таблице 6.  ;
;  ;
;  ;
;  .
.
Исходные данные: схема 8, в;  ,
,  ,
,  ,
,  .
.
Определить:  ,
,  ,
,  ,
,  .
.
Решение
Изображаем расчетную схему механизма согласно условию задачи (см. рис. 4.1).
Рассматривая вращательное движение кривошипа  , определяем скорость точки :
, определяем скорость точки :

 . Теперь, зная
. Теперь, зная  и направление
и направление  , воспользуемся теоремой о проекциях скоростей двух точек тела (стержня ) на прямую, соединяющую эти точки (прямая ). Сначала по этой теореме устанавливаем, в какую сторону направлен вектор (проекции скоростей должны иметь одинаковые знаки). Затем, вычисляя эти проекции, находим
, воспользуемся теоремой о проекциях скоростей двух точек тела (стержня ) на прямую, соединяющую эти точки (прямая ). Сначала по этой теореме устанавливаем, в какую сторону направлен вектор (проекции скоростей должны иметь одинаковые знаки). Затем, вычисляя эти проекции, находим

Теперь, зная и , построим мгновенный центр скоростей (МЦС) стержня ; это точка  – точка пересечения перпендикуляров к и . Определяем угловую скорость звена :
– точка пересечения перпендикуляров к и . Определяем угловую скорость звена :

Так как  , то мгновенный центр скоростей находится в бесконечности, следовательно,
, то мгновенный центр скоростей находится в бесконечности, следовательно,  .
.
Скорость точки будет направлена так же, как и скорость точек и , при этом  .
.

Рис. 4.1
Определяем угловую скорость звена  :
:

Ответ:  ,
,  ,
,  ,
,  .
.
2) Определить скорости центра и точек  (
(  ) колеса 2 планетарного механизма (см. рис. 9 а, б согласно варианту). Исходные данные приведены в таблице 7.
) колеса 2 планетарного механизма (см. рис. 9 а, б согласно варианту). Исходные данные приведены в таблице 7.  ;
;  .
.
Исходные данные: схема 9, б;  ,
,  ,
,  .
.
Определить:  ,
,  ,
,  .
.
Решение
Изображаем расчетную схему механизма согласно условию задачи (см. рис. 4.2).

Рис. 4.2
Рассматривая вращательное движение кривошипа , определяем скорость точки :

Определяем положение МЦС планетарного механизма точку , как точку соприкосновения колес 1 и 2.
Определяем угловую скорость звена 2:

Определяем скорости точек  и
и  :
:

Из  :
:

Тогда  . Вектор
. Вектор  и направлен в сторону вращения .
и направлен в сторону вращения .

Тогда  . Вектор
. Вектор  и направлен в сторону вращения .
и направлен в сторону вращения .
Ответ:  ,
,  ,
,  .
.
Дата добавления: 2020-01-07; просмотров: 722; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!