Перегрузочный робот фирмы Kawasaki Heavy (Япония)
Указанный робот-манипулятор относится к первому поколению подобных устройств и был установлен в 80-х годах прошлого века на линии изготовления бумажной массы на завершающем этапе производственного процесса. Он переносил на выносной конвейер готовую упакованную продукцию, подаваемую на тележке с линии упаковки, как показано на рис. 2.1.
Робот имеет три степени свободы - поворот (90°), вертикальное перемещение (35 мм), движение схвата (100 мм); грузоподъемность его - 250 кг; все приводы - гидравлические, система управления - цикловая, время одного цикла - 27 с.
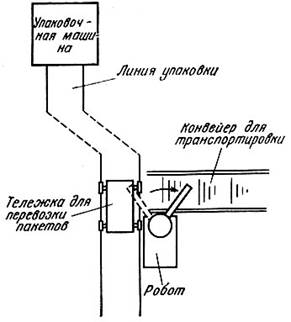
Рис. 2.1. План размещения перегрузочного робота
Технология перегрузки включала в себя следующую последовательность операций:
1. «Рука», несущая два схвата с дисковыми накладками, направляется к линии упаковки и ждет с широко раскрытыми схватами.
2. Когда подходит тележка с ящиком, схваты автоматически закрываются и захватывают ящик.
3. Робот поднимает ящик над тележкой приблизительно на 30 мм, как показано на рис. 2.2.
Рис. 2.2. Поднятие ящика роботом-манипулятором
В этом положении «рука» поворачивается на 90° вокруг вертикальной оси (см. рис. 2.3).

Рис. 2.3. Поворот «руки» робота вместе с ящиком
5. Затем один из двух схватов раскрывается, и ящик опрокидывается (рис. 2.4).

Рис. 2.4. Опрокидывание ящика перед установкой на конвейер
6. Открывается второй схват, и ящик опускается на конвейер (рис. 2.5).
|
|
|

Рис. 2.5. Окончание цикла установки ящика
7. Робот возвращается в первоначальное положение и ждет.
Робот-манипулятор РМ-20 для работы с волокнистыми плитами
Робот-манипулятор РМ-20 предназначен для захвата волокнистых плит из пачки или с технологической поверхности, перемещения, поворота и укладывания на технологическую поверхность или в штабель на поддон. Может быть использован в условиях повышенной запыленности и при низких температурах. Имеются модификации для работы с листовыми, в т.ч. длинномерными, материалами, для работы с мешками, ящиками, коробками и др. грузами массой до 100 кг.
Конструкция и габаритные размеры робота-манипулятора РМ-20 представлена на рис. 2.6.

Рис.2.6. Конструкция и габаритные размеры робота-манипулятора РМ-20
Внешний вид робота-манипулятора РМ-20 во время выполнения технологических операций представлен на рис. 2.7, а и б


а б
Рис. 2.7. Внешний вид робота-манипулятора РМ-20 во время выполнения технологических операций
Задача
Объект манипулирования массой m = 5,0 кг удерживается в призматических губках схвата (рис. 3.1). Коэффициент трения в месте соприкосновения губок схвата с объектом манипулирования m = 0,14.
|
|
|
Рассчитать силы N1, N2, действующие в местах контакта объекта манипулирования с губками схвата при j = 600.


Рис. 3.1. Схема схвата
Решение
Так как в соответствии с заданием (см. рис.3.1) объект удерживается в схвате с помощью запорного действия губок при ограниченном действии силы трения, то для расчета значения усилий N1, N2используем расчетные формулы, приведенные ниже (по [1], [5], [6]):
N1 = Q(sin j – m.cosj)/ (cosj + 2msinj),
N2 = Q/(cosj + 2msinj),
где Q = mg = 9,8. 5 = 49 Н - сила тяжести (вес) удерживаемого объекта.
Следовательно:
N1 = 49. (sin600 – 0,14cos600)/ (cos600 + 2.0,14sin600) = 49. (0,87 – 0,07)/(0,5+0,24) = 49. 0,8/0,74 = 53,0 Н;
N2 = 49 / (0,5 + 0,24) = 66,2 Н.
Дата добавления: 2019-11-25; просмотров: 271; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!