Методика расчёта винтового электромеханического подъёмника
Они могут быть 1, 2, 4 и 6 стоечными, грузоподъемностью от 1,5 до 14 т (рис. 9, 10, 11).

Рис. 9. Двухстоечный подъемник в сервисном центре
Рис. 10. Двухстоечный электромеханический подъемник ECON
Рис. 11. Двухстоечный электромеханический подъемник Mapower
Рис. 12. Электромеханический подъемник фирмы «Ravaglioli»
(грузоподъемность 3 т, высота подъема 1940 мм)
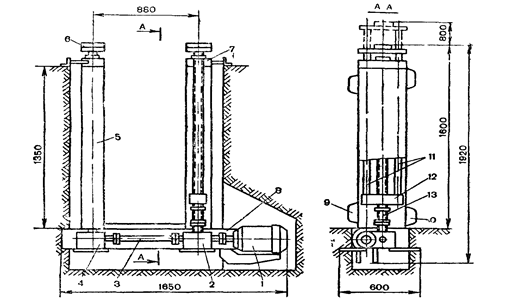
Рис. 13. Схема подъёмника электромеханического
Двухстоечный напольный подъемник (например, модели П-133) состоит из двух коробчатых стоек 1 (рис. 14) и поперечины 2. В каждой из стоек размещен ходовой винт 3, по которому перемещается грузоподъемная гайка 4 с раздвижными подхватами 5. Ходовые винты приводятся во вращение от электродвигателя 6 через редуктор 7, установленный на одной из стоек. Вращение на другой винт передается с помощью цепной передачи 8, смонтированной внутри поперечины 2.
Подъемник крепится к полу анкерными болтами 9. Упорные ролики 10 освобождают винт от изгибающих усилий. Выпускаются также 4-стоечные (например, модели П-150) и 6-стоечные подъемники (модели П-142), которые используются для вывешивания грузовых автомобилей и автобусов.
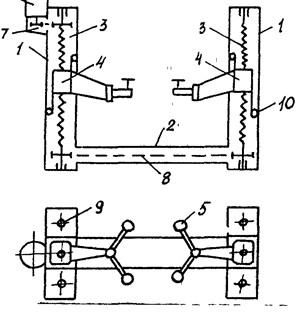
| Рис. 14. Схема винтового электромеханического подъемника: 1 – стойка; 2 – поперечина; 3 – винт; 4 – гайка; 5 – подхват; 6 – электродвигатель; 7 – редуктор; 8 – цепная передача; 9 – анкерный болт |
Существуют одностоечные подъемники модели П-235 и П-252, которые используются в комплекте из 4 или 6 стоек. Эти стойки передвижные и могут быть установлены в любом помещении с ровными полами. Управление работой стоек осуществляется с помощью передвижного пульта, обеспечивающего их синхронную работу.
|
|
|
В рассмотренных подъемниках вращаются винты, а гайки неподвижны. Имеются конструкции подъемников с неподвижными винтами и вращающимися гайками. В этом случае электродвигатель и редуктор устанавливаются на подъемной раме, а вращение гаек осуществляется цепной передачей, смонтированной в пустотелой коробке подъемной рамы. Главным преимуществом электромеханических винтовых подъемников является их надежность и безопасность в работе, весьма простое устройство. К недостаткам следует отнести низкий КПД, необходимость тщательного ухода за грузовыми винтами, их периодическая очистка и смазка.
Расчет электромеханических подъемников во многом аналогичен расчету винтовых домкратов. Однако есть и некоторые отличия. В подъемниках с вращающимся ходовым винтом для исключения воздействия изгибающих моментов на грузоподъемную гайку применяют опорные ролики (рис. 15). Нагрузка на один винт (на одну стойку) подъемника определяется по формуле:
|
|
|
 , Н (11)
, Н (11)
где n – число стоек; Ма – масса автомобиля, кг; g – ускорение свободного падения, м/с2; Кр = 1,1...1,3 – коэффициент неравномерности распределения нагрузки по стойкам. Большее значение коэффициента Кр берется для 4-х стоечных, а меньшее для 2-х стоечных подъемников.
Длина плеча подхвата:  , м (12)
, м (12)
где В – ширина автомобиля, м; L = 0,25...0,4 – запас по ширине на сторону, м. Меньшее значение L берется для легковых автомобилей.
Диаметр роликов d берут в пределах 0,05...0,07 м. Можно задаться расстоянием АК и определить длину роликов. Можно поступить наоборот. Обычно АК = (0,3...0,5)СD, СК = 0,5...0,7АК.
Силы, действующие на ролики, определяют исходя из системы уравнений
 (13)
(13)
Отсюда Rk = QCD/AK; RA = RK независимо от соотношения размеров АК и СК.
Если ролик и направляющая поверхность ролика не термообработаны, то они рассчитываются на смятие. Но при этом попускаемые напряжения сравнительно малы и ролики по длине и диаметру получаются очень большими. Поэтому, как правило, контактирующие поверхности подвергаются термообработке и рассчитываются по контактным напряжениям:
|
|
|
 , (14)
, (14)
где Eпр=2E1E2/(E1+E2) – приведенный модуль упругости;
 – приведенный радиус кривизны; q – распределенная нагрузка.
– приведенный радиус кривизны; q – распределенная нагрузка.
Если ролики и направляющая изготовлены из одинакового материала, то
E1=E2=E пр,
 ,
,
где r 1 – радиус ролика; r2 – радиус направляющей. Если  , то
, то  .
.
После подстановки полученных результатов в уравнение (14) и замены r1 через d/2 получим
 , (15)
, (15)
где S = 1,2...1,3 – коэффициент запаса;  =2,8·sТ – при объемной закалке;
=2,8·sТ – при объемной закалке;  =50·106 (Н RC) – при закалке ТВЧ; =40·106(Н RC) – при цементации и азотировании поверхностей. Здесь HRC – твердость поверхностей по Роквеллу.
=50·106 (Н RC) – при закалке ТВЧ; =40·106(Н RC) – при цементации и азотировании поверхностей. Здесь HRC – твердость поверхностей по Роквеллу.
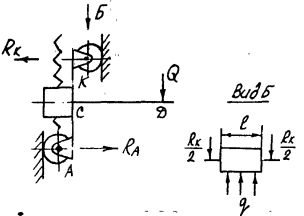
Рис. 15. Схема действия сил на опорные ролики
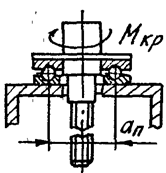
Рис. 16. Верхняя опора грузового винта
Для качественных конструкционных сталей  =650·106 Н/м2, а после термообработки HRC = 45...50 ед.
=650·106 Н/м2, а после термообработки HRC = 45...50 ед.
Длина ролика:
 , м . (16)
, м . (16)
Ролики в процессе качения по направляющим создают дополнительную силу на винте, т.е.:
|
|
|
 , Н (17)
, Н (17)
где f = 0,01 – коэффициент трения качения, Z – число роликов в стойке.
Уточненная сила на винте определится по формуле:
 , Н (18)
, Н (18)
Далее следует расчет, аналогичный расчету винта домкрата. Длина винта принимается равной высоте подъема автомобиля. Винт на устойчивость не считается, т.к. обычно он выполняется висячим с опорой в верхней его части (рис. 16). В качестве опоры используются упорные или радиально-упорные подшипники, или сборные узлы из упорных и радиальных подшипников. Поэтому при расчете крутящего момента, прилагаемого к винту, используется формула:
 , Нм , (19)
, Нм , (19)
где f1 = 0,01, dп – диаметр дорожки тела качения упорного подшипника, м.
Так как частота вращения вала невелика, подбор подшипника ведется по статической грузоподъемности:
 .
.
Скорость подъема V принимается равной 1,5...2 м/мин.
Частота вращения винта вычисляется по формуле:
 . (20)
. (20)
Задаваясь частотой вращения ротора электродвигателя 750, 1000, 1500 или 3000 мин-1, определим передаточное число от электродвигателя к винту:
 .
.
Если  , можно использовать для передачи момента от электродвигателя к винту клиноременную передачу. В противном случае необходимо подобрать редуктор.
, можно использовать для передачи момента от электродвигателя к винту клиноременную передачу. В противном случае необходимо подобрать редуктор.
Мощность электродвигателя одной стойки определяется по формуле:
 , Вт , (21)
, Вт , (21)
где  – механический КПД трансмиссии. При использовании клиноременной передачи = 0,96. Если установлен редуктор, принимается
– механический КПД трансмиссии. При использовании клиноременной передачи = 0,96. Если установлен редуктор, принимается  указанный в справочнике. Если на несколько стоек используется один привод, а ходовые винты соединены цепной передачей, то:
указанный в справочнике. Если на несколько стоек используется один привод, а ходовые винты соединены цепной передачей, то:  , Вт,
, Вт,
где Z – число стоек;  – КПД цепной передачи.
– КПД цепной передачи.
Дата добавления: 2019-11-16; просмотров: 2550; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!