Классификация систем автоматического управления
Системы автоматического управления классифицируют по различным признакам.

Рис. 1.8. Укрупненная классификация САУ по классам дифференциальных уравнений
По классам дифференциальных ура в н е н и й, которыми они описываются, различают САУ, приведенные на рис. 1.8.
Линейными называют системы, которые могут быть отражены линейными операторными уравнениями (например, линейными дифференциальными уравнениями или системами этих уравнений); в противном случае система входит в класс нелинейных.
Линейные и нелинейные дискретные системы характеризуются соответственно линейными и нелинейными разностными уравнениями или их системами.
Линейные и нелинейные стационарные системы выражают дифференциальные уравнения или системы уравнений с постоянными коэффициентами.
Линейные и нелинейные нестационарные системы описываются дифференциальными уравнениями или системами уравнений с переменными коэффициентами.
Сосредоточенные системы, или системы с сосредоточенными параметрами, определяются обыкновенными дифференциальными уравнениями.
Распределенные системы, или системы с распределенными параметрами, описываются дифференциальными уравнениями в частных производных.
По принципу действия различают САУ:
по отклонению — принцип И. И. Ползунова (первая система управления уровнем воды в баке паровой машины была создана им в 1765 г.);
по возмущению — принцип Ж. Понселе (первая система управления по нагрузке на валу паровой машины была предложена им в 1830 г.);
|
|
|
комбинированные — объединяют принципы И. И. Ползунова и Ж. Понселе.
Структурная схема САУ по отклонению (рис. 1.9, а) аналогична схеме типовой промышленной САУ.
Решая конкретную задачу управления работой паровой машины, И. И. Ползунов и не предполагал, что его схемное решение будет использоваться через 200 лет в 80...90 % промышленных САУ.
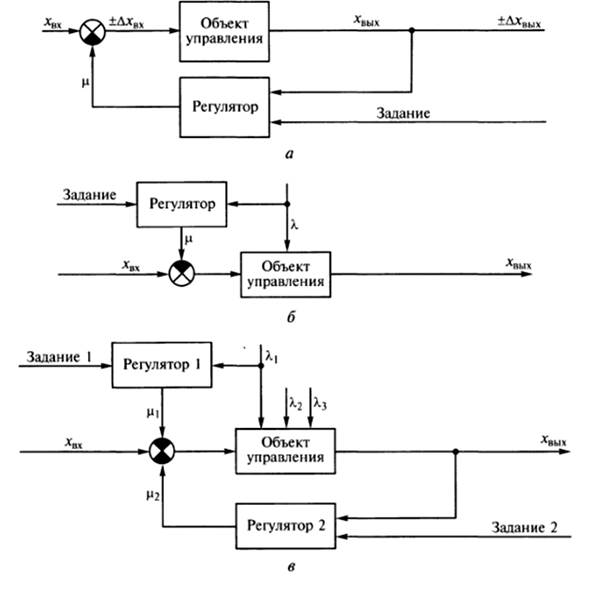
Рис. 1.9. Структурные схемы САУ: о — по отклонению; б — по возмущению; в — комбинированной
Достоинством САУ по отклонению является то, что она компенсирует влияние любого возмущающего воздействия, которое вызвало отклонение значения ее выходного сигнала (±Дхвых), изменением через цепь отрицательной ОС значения входного сигнала (±Дхвх) с помощью сигнала р, поступающего с регулятора.
Недостаток САУ по отклонению состоит в том, что отклонение выходного сигнала (например, вследствие нарушения технологического режима) должно сначала появиться и только после этого регулятор должен не только компенсировать возмущающее воздействие, но и свести к нулю отклонение от заданного значения регулируемого параметра хвь|Х. При использовании высокочувствительного датчика это отклонение может быть минимальным, но в принципе оно будет иметь место.
|
|
|
Структурная схема системы автоматического управления по возмущениюпредставлена на рис. 1.9, б.
Иногда возмущающее воздействие (например, изменение температуры наружного воздуха) можно измерить, т.е. если X единственное возмущающее воздействие на объект (например, сигнал поверхностного теплообменника, установленного на открытой площадке), его измеряют и подают на регулятор для сравнения с заданным значением и выработки управляющего сигнала р, влияющего на значение входного сигнала.
При таком принципе управления изменение возмущающего воздействия компенсируется регулятором до того, как оно нарушит технологический режим работы объекта, что является главным достоинством этого типа САУ. Однако существенный недостаток таких систем — неспособность компенсировать влияние на объект других возмущающих воздействий, которых в современных сложных установках бывает несколько и которые иногда невозможно измерить. Поэтому в промышленности САУ по возмущению используются редко.
В САУ по возмущению выходной сигнал объекта или системы жестко (через цепь элементов) не связан с входным сигналом. Следовательно, САУ по возмущению является разомкнутой, т.е. системой без ОС по выходному сигналу.
|
|
|
Комбинированные САУ (рис. 1.9, в) лишены многих недостатков предыдущих рассмотренных схем. Оператор-технолог обычно знает, откуда ждать наибольшее возмущающее воздействие, и, если его можно измерить, для компенсации устанавливается регулятор 1. Для компенсации влияния остальных возмущающих воздействий в цепь отрицательной ОС подключается регулятор 2. Таким образом, в комбинированных САУ используются и принцип И. И. Ползунова, и принцип Ж. Понселе.
По закону изменения во времени выходного сигнала задатчика различают САУ автоматической стабилизации, программные и следящие. Отличительным признаком
САУ автоматической стабилизации является постоянное во времени значение выходного сигнала их задатчика, т.е.

Современные технологии — это в большинстве случаев технологии непрерывных производств, в которых заданный технологический режим не меняется сутками и месяцами. Объекты таких технологий, обладающих высокими технико-экономическими показателями (ТЭП), обычно управляются САУ автоматической стабилизации.
Отличительным признаком программных САУ является изменение выходного сигнала задатчика по заранее известной функции времени, т.е. по программе
|
|
|
Программные САУ используются для управления периодическими процессами (металлообработкой, термообработкой изделий и др.). При этом способ задания программы может быть самый различный: от применения механического вращающегося кулачка до программы, записанной в микропроцессор.
В следящих САУ выходной сигнал задатчика заранее неизвестен, т.е. он может быть случайной величиной:
Такая ситуация возникает, когда следящая система является вторичной и отслеживает параметр, значение которого заранее неизвестно, например при необходимости подачи воздуха в определенном соотношении с расходом газа в топку котла. В этом случае расход газа меняется случайным образом под влиянием возмущающих воздействий, но система управления расходом воздуха должна выдерживать определенное их соотношение, т.е. следить за изменением расхода газа, который является для нее заданием.
По закону изменения во времени выходного сигнала регулятора различают САУ дискретные (например, двух-, трехпозиционные) и непрерывные (аналоговые).
Выходной сигнал регулятора в двухпозиционных САУ может принимать два значения: 0— 1; включено —отключено; замкнут — разомкнут. Примером двухпозиционной системы является бытовой холодильник с терморсле.
На рис. 1.10 приведен временной график работы такой САУ (а — выходной сигнал объекта хвыхо6, б — выходной сигнал регулятора дтвыхрег). При отключенном циркуляционном насосе хладагента температура / в камере холодильника постепенно повышается и, достигнув определенного значения (+6 °С), замыкает термореле, через контакт которого затем включается насос. При циркуляции хладРис. 1.10. Временной график работы двухпозиционной САУ
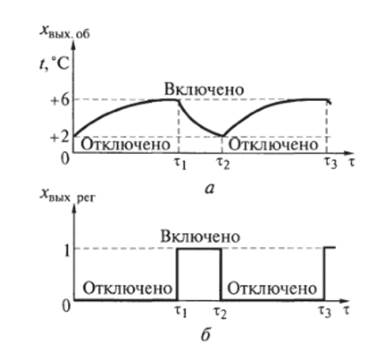
агента температура в холодильнике снижается до +2°С, термореле размыкает контакт цепи насоса и цикл повторяется.
Двухпозиционные САУ надежны, дешевы, но точность регулирования параметра в них мала.
Реже применяются трехпозиционные САУ, в которых выходной сигнал регулятора может принимать три значения: -1; 0; +1, или больше — норма — меньше. Качество работы трехпозиционных САУ выше, но надежность ниже.
В аналоговых САУ выходной сигнал регулятора непрерывно изменяется во времени, иногда по сложному закону в определенном диапазоне. В Государственной системе приборов (ГСП) эти диапазоны стандартизированы.
Диапазон выходных сигналов пневматических регуляторов составляет 0,02... 0,1 М Па.
Электрические регуляторы имеют несколько стандартных диапазонов: 0...5, 0...20, 4...20 мА; 0... 10 В и др.
В дальнейшем рассматриваются методика исследования и математический аппарат, используемый при разработке САУ непрерывного действия, действующие по принципу И. И. Ползунова, так как таких систем в промышленности большинство.
Контрольные вопросы
1. Что такое объект управления и каковы различия его технологических и регулируемых параметров?
2. Чем отличается система автоматического управления от системы ручного регулирования?
3. Что такое возмущающие воздействия, входные и выходные сигналы САУ?
4. Поясните общую функциональную схему технологического процесса.
5. Поясните функциональную схему закаливания металла в электропечи.
6. Поясните схему и назначение основных элементов САУ процессом закаливания металла.
7. Поясните схему и назначение элементов системы автоматического регулирования уровня жидкости.
8. Поясните схему и назначение основных устройств замкнутой САУ уровнем жидкости.
9. В чем состоит различие разомкнутой и замкнутой САУ числом оборотов электродвигателя? Поясните назначение элементов этих САУ.
10. Поясните типовую функциональную схему САУ и назначение всех ее элементов.
11. На какие виды подразделяют САУ по классам дифференциальных уравнений?
12. Как классифицируются САУ по принципу действия? Приведите примеры таких САУ.
Дата добавления: 2019-11-16; просмотров: 1243; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!