Типовая функциональная схема системы автоматического управления
ОСНОВНЫЕ ПОНЯТИЯ, ЦЕЛИ И ПРИНЦИПЫ УПРАВЛЕНИЯ
Основные понятия и определения
Рассмотрим основные определения, принятые в управлении.
Теория автоматического управления (ТАУ) — это совокупность методов и специального математического аппарата, позволяющая спроектировать работоспособную промышленную систему автоматического управления (САУ), отвечающую заданным требованиям по качеству ее работы.
Система автоматического управления — это совокупность технических средств для управления регулируемым параметром, в которой вычислительные и логические операции осуществляются с помощью специальных технических устройств: автоматического регулятора, программируемого контроллера или управляющей вычислительной машины (УВМ).
Основной частью (узлом, элементом) САУ является объект управления — техническая установка или технологическая цепь установок, физико-химические процессы в которых управляются (регулируются) с помощью специальных технических средств.
Технологические параметры — это физико-химические величины, характеризующие состояние технологического процесса в объекте управления (например, температура, давление, скорость вращения и др.).
Регулируемый параметр — это технологический параметр, значением которого управляют с помощью специальных технических средств. Число регулируемых параметров, как правило, значительно меньше общего числа технологических параметров.
|
|
|
Система ручного регулирования (СРР) — это совокупность технических средств для управления регулируемым параметром, в которой вычислительные и логические операции осуществляются человеком — оператором. Принято считать, что такая система замкнута на человека, или в техническом смысле разомкнута.
Под воздействиями в ТАУ понимают факторы, изменяющие течение технологического процесса в объекте управления. Различают возмущающие и управляющие воздействия.
Возмущающие воздействия носят случайный, трудно предсказуемый характер. К ним относятся, например, изменение температуры наружного воздуха, колебания напряжения в электросети и др. Управляющие воздействия на объект управления организуются -техническим устройством (в САУ) или оператором (в СРР) для компенсации влияния возмущающих воздействий.
Под сигналами в ТАУ понимают совокупность потоков энергии или вещества, поступающих в объект управления или выходящих из него, возмущающие и управляющие воздействия, а также регулируемые параметры.
По направлению различают входные и выходные сигналы объекта управления. Так, возмущающие и управляющие воздействия будут входными сигналами для объекта управления; регулируемый же параметр в ТАУ всегда принимают за выходной сигнал объекта управления, даже если он физически не выходит за пределы объекта (например, температура в топке котла, уровень вещества в бункере, напряжение на обмотках электродвигателя и др.).
|
|
|
Примеры систем автоматического управления
Параметры технологических процессов (ТП), их характеристики изменяются по определенным законам (или могут быть постоянны). Для достижения целей управления во всех отраслях техники возникает необходимость изменения параметров с учетом заданного закона. Для этого используют функциональные модели, изображаемые в виде схем (рис. l.l, а), на которых элементы САУ обозначают прямоугольником с надписью, а сигналы, поступающие на эти элементы, — стрелками.
Любой параметр процесса, представляющий собой изменение среды, является сигналом. Он может быть механическим, электрическим, электромагнитным, оптическим и т.д. Параметры, содержащие информацию, называются информационными. Например, сигналом является электрическое напряжение, информационным параметром — амплитуда этого сигнала.
Аналоговым называется сигнал/(/), информационные параметры которого могут принимать любые значения в заданном числовом интервале а...Ь (рис. l.l, б).
|
|
|
Дискретным считается сигнал, информационные параметры которого принимают только дискретные значения.
Рассмотрим конкретный технологический процесс — регулирование температуры в электропечи для закаливания металла. Для реализации этого процесса электропечь снабжается управляющим (или регулирующим) органом, с помощью которого можно управлять процессом закаливания — изменять температуру в соответствии с заданным законом.
Создание условий, обеспечивающих требуемое протекание процесса закаливания, т.е. поддержание необходимого режима, называется управлением. Управление может быть ручным или авто-

Рис. 1.1. Функциональный элемент САУ: а — схема прохождения сигнала; 6 — аналоговый сигнал /(/)
матическим. При ручном управлении воздействие на управляющий орган осуществляет человек, наблюдающий за ходом процесса.
Функциональной схемой называется символическое изображение всех функциональных элементов технологического процесса и связей между ними, отражающее последовательность процессов в системе.
Представим с помощью функциональной схемы технологический процесс закаливания металла в электропечи с участием оператора (рис. 1.2). Данная система поддерживает необходимый режим, т.е. изменение температуры y(t) в электропечи по заданному закону. Для обеспечения требуемого процесса электропечь снабжается двумя элементами: термопарой, с выхода которой получа-
|
|
|
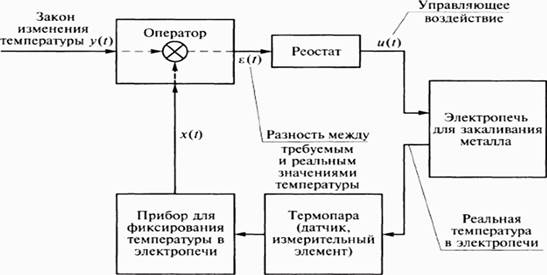
Рис. 1.2. Функциональная схема технологического процесса закаливания
металла в электропечи ют электрическое напряжение х(/), пропорциональное температуре в электропечи, и реостатом, с помощью которого меняется сопротивление в цепи ее нагрева. При увеличении сопротивления ток в цепи нагрева уменьшается, а следовательно, уменьшается и температура в электропечи. При уменьшении сопротивления ток возрастает и температура увеличивается.
С учетом показаний прибора, на котором фиксируется реальная температура в электропечи, и того, в какую сторону она отклонилась от заданного значения, оператор перемешает движок реостата. При этом отклонение реальной температуры в электропечи от заданной не должно превышать допустимого значения е(/). В системе имеет место так называемая обратная связь (ОС). Важнейшее звено рассмотренного технологического процесса — оператор, следовательно, эта система является ручной.
При автоматическом управлении процессом воздействие u(t) на управляемый орган (реостат) осуществляет специальное управляющее устройство. Рассмотрим схему реализации приведенного технологического процесса без участия человека, в которой перемещение движка реостата в зависимости от наблюдаемого отклонения температуры выполняется с помощью двигателя (привода). Поскольку с выхода термопары получают сигнал очень небольшой мощности-Хнедостаточной для питания даже небольшого приводного двигателя), в схему вводят промежуточное звено — усилитель мощности. Схема реализации процесса закаливания металла в электропечи без участия человека представлена на рис.
1.3, а. Здесь сигнал y(t) (заданной температуры в печи) называют управляющим, сигнал x(t) (реальной температуры) — управляемой переменной, а систему, реализующую процесс закаливания, — системой автоматического управления.
Система автоматического управления представляет собой совокупность объекта управления (ОУ) и управляющего устройства, включающего в себя усилитель, реостат, измерительное устройство (датчик) и элемент сравнения. Объектом управления в данном случае является электропечь, а управляемой выходной переменной — температура. Под управляющим подразумевается устройство, обеспечивающее процесс управления, т.е. целенаправленное действие, приводящее к желаемому изменению управляемой переменной (температуры закаливания).
Для улучшения качества управления (например, уменьшения ошибки ?(/), степени колебательности и т.д.) в систему вводят дополнительный элемент — регулятор. Тогда схема САУ, представленная на рис. 1.3, а, будет иметь вид, показанный на рис. 1.3, б.
При создании и функционировании САУ параметры элементов 4...достаются неизменными, поэтому часть системы, включающая в себя эти элементы, носит название неизменяемой. На

б
Рис. 1.3. Автоматическая система, реализующая процесс закаливания
металла в электропечи:
а — функциональная схема; б — измененная функциональная схема; / — задающее устройство; 2 — сравнивающее устройство; 3 — регулятор; 4 — усилитель мощности; 5 — привод (двигатель); 6 — реостат; 7 — электропечь; 8 — измерительное устройство (датчик); I — неизменяемая часть САУ; II — регулятор (изменяемая часть САУ) практике неизменяемую часть часто называют объектом управления, а к управляющему устройству относят лишь регулятор. Именно его параметры изменяются в процессе проектирования САУ.
Рассмотрим еще несколько примеров конкретных автоматических систем.
В энергетике используется много САУ, предназначенных для регулирования уровня жидкости, например автоматические регуляторы уровня в парогенераторах, конденсаторах, компенсаторах давления, барабанах-сепараторах и др. Большинство из перечисленных САУ построены по схеме, показанной на рис. 1.4, а.
Уровень жидкости //(/) зависит от разности двух величин: се притока G„ и расхода Gp. Если Gn > Gp, уровень растет, и наоборот, при Gn < (7Р уровень уменьшается. Приток Gn можно изменять посредством регулирующего клапана (РК), который управляется


6
Рис. 1.4. Схемы системы автоматического регулирования уровня жидкости:
а — принципиальная; б — функциональная; / — задающее устройство; 2 — сравнивающее устройство; 3 —регулятор; 4 — усилитель мощности; 5 — привод; 6 — регулирующий орган (клапан); 7 — объект управления; 8 — уровнсмстр; 9, 10 — линейные расходомеры
электроприводом (II). Сигнал, соответствующий действительному уровню h(t), измеряется уровнемером (УМ) и сравнивается с заданным уровнем Л3.
В зависимости от значения и знака сигнала рассогласования е(0 регулятор посредством электропривода увеличивает (при е > 0) или уменьшает (при е < 0) приток жидкости (7П, поддерживая равенство между Gn и Ср при заданном уровне Иг
Изменение расхода <7Р нарушает баланс в схеме, т.с. Ср является возмущающим сигналом.
Для повышения точности регулирования наряду с сигналом е(1) используется сигнал Gn> который обеспечивает местную ОС, или так называемое комбинированное регулирование.
Выходной сигнал некоторых расходомеров (РМ) пропорционален квадрату расхода жидкости, поэтому цепи измерения их расходов содержат блоки извлечения корня (БИК).
Воспользовавшись стандартными обозначениями можно записать: сигнал на входе системы (заданное воздействие) y(t) = Л3; сигнал на выходе системы (уровень жидкости) *(/) = /?(/); сигнал возмущения (расхода жидкости) /?(/) = (7Р(/).
Функциональная схема САУ уровнем жидкости может быть представлена в виде, изображенном на рис. 1.4, б.
Ранее рассмотрены замкнутые системы, в которых имеет место обратная связь, т.е. сравнение входного сигнала (эталона) с выходным (реальным значением регулируемой величины). Кроме того, существуют автоматические системы разомкнутого типа. В разомкнутых системах для выработки управляющего воздействия u(t) (сигнала с выхода регулятора) используется только информация о цели управления >
В качестве примера рассмотрим разомкнутую САУ числом оборотов электродвигателя постоянного тока (рис. 1.5, а).
При ручном разомкнутом управлении нужное число оборотов двигателя, пропорциональное напряжению на входе усилителя, задается оператором путем перемещения движка потенциометра /. С выхода потенциометра сигнал поступает на усилитель 2, вызывая изменение тока в якоре электродвигателя 3 и соответственно его угловой скорости, которая измеряется тахогенератором 4 со стрелочным прибором, но не используется для замыкания системы.
Вследствие старения, износа, неточности исполнения элементов и колебаний температуры градуировка системы (в которой каждому положению движка потенциометра должно соответствовать заданное число оборотов двигателя в установившемся режиме) нарушается, поэтому системы, работающие по разомкнуто-

Рис. 1.5. Функциональная схема разомкнутой САУ числом оборотов электродвигателя:
1 — потенциометр; 2 — усилитель; 3 — электродвигатель; 4 — тахогенератор со стрелочным прибором
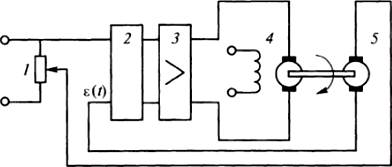
Рис. 1.6. Функциональная схема замкнутой САУ числом оборотов электродвигателя:
1 — потенциометр; 2 — регулятор; 3 — усилитель; 4 — электродвигатель; 5 —
тахогенератор
му циклу, часто не могут обеспечить высокое качество работы (высокую точность). Данную систему можно автоматизировать, при этом схема будет функционировать по замкнутому циклу, т.е. по принципу ОС, и, следовательно, качество ее работы повысится. Функциональная схема такой замкнутой системы представлена на рис. 1.6.
В системе с замкнутым циклом в отличие от разомкнутой системы имеет место сравнение реального числа оборотов двигателя с требуемым. Сигнал рассогласования (ошибки) е(г) поступает на регулятор 2 и усилитель J, т.е. управляет электродвигателем 4, а с тахогенератора 5 идет сигнал, пропорциональный скорости, на регулирующий потенциометр /. Выбор структуры и параметров регулятора 2 должен обеспечить высокую точность работы системы. Замкнутая система нс требует точной градуировки: ее точность сохраняется и при отклонении параметров от эталонных из-за старения элементов или по другим причинам.
В соответствии с определением кибернетики как науки об управлении, передаче и обработке информации САУ являются кибернетическими, т.е. для них характерны понятия, составляющие основу кибернетики: управление, информация, система. Элементы САУ связаны между собой информационными каналами и линиями управления.
Системы автоматического управления выполняют функции, которые существенно отличаются от свойств и функций их отдельных элементов. Отличительной чертой рассмотренных САУ является поступление на их входы так называемой обратной информации, необходимой для контроля (т.е. наличие ОС). Так как ОС замыкает канал управления, такое управление называют замкнутым.
При управлении с ОС значение управляющей переменной постоянно сопоставляется с ее заданным (эталонным) значением. Цель управления — сделать эти величины близкими несмотря на различные помехи.
Контур управления — это система, состоящая из объекта управления и регулятора (управляющей системы, с помощью которой добиваются нужного качества управления).
К основным функциям контура управления относятся: измерение, сравнение и реагирование (выработка команды управления u(t) объектом), которые должны по возможности выполняться оптимально. В этом случае контур управления несмотря на различные помехи будет постоянно поддерживать управляемую переменную близкой к ее заданному значению.
Цели и принципы управления
Задачей управления является изменение протекающих в объекте управления процессов посредством соответствующих команд для достижения поставленной цели.
В основе ТАУ, рассматривающей общие принципы проектирования САУ, лежат математические модели, отражающие связь элементов систем друг с другом и внешней средой.
Таким образом, системой автоматического управления называется система, представляющая собой совокупность объекта управления и управляющего устройства, обеспечивающего процесс управления, т.е. целенаправленное воздействие, приводящее к желаемому изменению управляемых переменных.
Фундаментальными принципами управления являются: принцип разомкнутого управления;
принцип компенсации — управления по возмущению (если возмущающие воздействия в системе велики, дтя повышения точности разомкнутой системы на основе измерения возмущений в алгоритм управления вводятся коррективы, компенсирующие влияние этих возмущений); принцип ОС.
Для систем, работающих по принципу обратной связи, характерны:
наличие ОС;
преобразование слабых управляющих сигналов на входе, идущих от измерительного устройства, в достаточно мощные воздействия на объект (ток в цепи нагрева);
наличие ошибки e(f), являющейся движущим сигналом для системы, работающей на уменьшение этой ошибки;
замкнутость системы через ОС, реализуемую с помощью измерительного устройства — термопары. Измерительный (чувствительный) элемент в этом случае служит не просто для регистрации температуры, а для формирования сигнала рассогласования е(/), являющегося входным для усилителя, сигнал с которого затем подается на вход системы.
Использование принципа ОС позволяет дать еше одно определение САУ с акцентом на особом значении этого принципа: САУ — это система, стремящаяся сохранить в допустимых пределах рассогласование (ошибку) е(/> между требуемыми y(t) и действительными х(() значениями управляемых переменных с помощью их сравнения на основе принципа ОС и использования получаемых при этом сигналов для управления.
Типовая функциональная схема системы автоматического управления
Приведенные примеры позволяют представить типовую функциональную схему,САУ (рис. 1.7). Рассмотрим назначение каждого из элементов этой схемы.
Задающее устройство 1 преобразует воздействие y2(t) в сигнал y(t), а сравнивающее устройство 2 в результате сравнения сигнала y(t) и регулируемой величины x(t) (предполагается, что элементы 10 и 11не искажают сигнал *(/)) вырабатывает сигнал ошибки ?(/). Сравнивающие устройства 2, 5 также называют датчиками ошибки, отклонения, рассогласования.
Преобразующее устройство 3 служит для преобразования одной физической величины в другую, более удобную для использования в процессе управления (во многих системах преобразующее устройство отсутствует).
Регуляторы 4, 8 служат для обеспечения заданных динамических свойств замкнутой системы. С их помощью обеспечивается высокая точность ее работы в установившемся режиме, а также демпфируются сильные колебательные процессы (например, летательных аппаратов). Более того, введение в систему регулятора

Рис. 1.7. Типовая функциональная схема САУ:
1 — задающее устройство; 2, 5 — сравнивающие устройства; 3 — преобразующее устройство; 4, 8 — корректирующие устройства (регуляторы); 6 — усилительное устройство; 7 — исполнительное устройство; 9 — объект управления; 10 — чувствительный (измерительный) элемент; 11 — элемент главной ОС позволяет устранить незатухающие или возрастающие колебания управляемой величины. Иногда регуляторы вырабатывают управляющие сигналы (команды) в зависимости от возмущающих воздействий, что существенно повышает качество работы систем, увеличивая их точность.
Из приведенной на рис. 1.7 схемы САУ видно, что в хорошо спроектированной системе ошибка е(/) очень мала, в то время как на управляемый объект должны поступать воздействия с мощностью, достаточной для питания двигателя. В связи с этим важным элементом САУ является усилительное устройство 6, предназначенное для повышения мощности сигнала ошибки е(/), т.е. управления энергией, поступающей от постороннего источника. На практике широко используются электронные, магнитные, гидравлические и пневматические усилители.
Исполнительное устройство 7 предназначено для влияния на управляющий орган 9, подвергающийся воздействию внешних полей n(t). Исполнительные устройства могут быть пневматические, гидравлические и электрические,'которые подразделяются, в свою очередь, на электромоторные и электромагнитные.
Пневматические исполнительные устройства имеют сравнительно малые габаритные размеры и массу, но требуют большого расхода сжатого газа. Гидравлические исполнительные устройства способны преодолевать большие нагрузки и практически безынерционны. Их недостаток — большая масса. Электрические исполнительные устройства достаточно универсальны и отличаются удобством подведения к ним энергии. Вместе с тем их использование требует наличия достаточно мощного источника тока. В некоторых САУ исполнительный механизм отсутствует и воздействие на объект осуществляется изменением состояния управляющей величины (тока, напряжения) без помощи механических устройств.
Чувствительный (измерительный) элемент — датчик 10 — необходим в САУ для преобразования управляемых переменных в сигналы управления (например, угла в напряжение).
Элемент, который подвергается управлению, является объектом управления. При проектировании объектом управления считают всю неизменяемую часть САУ (т.е. все элементы, кроме регулятора). Это могут быть электрическая печь для закаливания металла, самолет, ракета, космический аппарат, двигатель, ядер- ный реактор, станок для обработки металла и т.д. В связи с большим разнообразием объектов управления разными могут быть и управляемые переменные: напряжение, число оборотов, угловое положение, курс, мощность и т.д.
Из анализа рис. 1.7 можно сделать вывод о том, что САУ представляет собой замкнутую систему, обладающую свойством однонаправленности и реагирующую на сигнал ошибки е(г).
Определим сигналы, представленные на рис. 1.7: y(t) — преобразованное задающее воздействие, т.е. входной сигнал;
jc(/) — управляемая переменная, т.е. выходная величина системы, реакция;
е(/) — сигнал ошибки (рассогласования); и,(Г) и u2(t) — команды управления; n(t) — помеха.
Система, в которой сигнал y{t) — известная функция (детерминированный сигнал) на всем промежутке управления, называется системой программного управления.
Система, в которой задающее воздействие y(t) = const, называется системой стабилизации.
Система, в которой задающее воздействие y(t) — случайная функция, называется следящей системой.
Таким образом, одномерные системы могут быть системами программного управления, системами стабилизации и следящими системами.
Кроме того, на практике используются:
системы с поиском экстремума показателя качества;
системы оптимального управления;
адаптивные системы.
Дата добавления: 2019-11-16; просмотров: 2931; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!