Математические модели управляющих устройств
Математические модель гидроусилителя
Составление математической модели рассмотрим на примере гидравлического усилителя, схема которого приведена на рис. 8.4. Гидравлический усилитель с золотником, нагруженным пружинами, состоит из ступени в виде сопла-заслонки и ступени в виде золотникового распределителя. Гидроусилитель включает золотник 1, пружины, нерегулируемые дроссели 3, заслонку 4 и сопела.
Гидравлический усилитель работает следующим образом. Отклонение заслонки 4 от нейтрального положения вызывает изменение расходов через сопла и перепад давлений в полостях А и Б, необходимый для управления золотником 1.
Для обеспечения пропорциональной зависимости перемещений золотника от перемещений заслонки применены пружины 2. Усилие этих пружин при смещении золотника от нейтрального положения уравновешивают силы давлений, приложенные к нему со стороны жидкости в полостях А и Б.
| x |
| Pп |
| Pсл |
| 1 |
| p1 |
| p2 |
| Рис. 8.4. ГУ с золотником, нагруженным пружинами |
Составим математическое описание гидроусилителя. Зависимость расхода жидкости Qу, обеспечивающего перемещение золотника, от отклонения hу заслонки от нейтрального положения и разности давлений pу в полостях А и Б примем линейной:
 , (8.1)
, (8.1)
где К Q . h и К Q . p – коэффициенты расхода, можно определить экспериментально.
С другой стороны, расход связан с перемещением золотника:
|
|
|
 , (8.2)
, (8.2)
где  – площадь торца золотника; d – диаметр золотника; x – перемещение золотника; Vу – объем каждой из полостей А и Б; Bж – модуль объемной упругости жидкости. Второе слагаемое в правой части уравнения (8.2) учитывает изменение объема жидкости, обусловленное её сжимаемостью.
– площадь торца золотника; d – диаметр золотника; x – перемещение золотника; Vу – объем каждой из полостей А и Б; Bж – модуль объемной упругости жидкости. Второе слагаемое в правой части уравнения (8.2) учитывает изменение объема жидкости, обусловленное её сжимаемостью.
Уравнения (8.1)–(8.2) можно заменить одним уравнением в форме “вход-выход”; приняв за входную величину φЯ, а за выходную – pу, получим
 (8.3)
(8.3)
Разделив все члены уравнения (8.3) на К Q . p, получим его стандартную форму:
 , (8.4)
, (8.4)
где Тгу1 и Тгу2 – постоянные времени гидроусилителя; Кφ.h – коэффициент преобразования перемещения hy заслонки в разность давлений pу. Постоянные времени гидроусилителя и коэффициент преобразования определяются по соотношениям:
 , (8.5)
, (8.5)
 , (8.6)
, (8.6)
 . (8.7)
. (8.7)
Уравнение движения золотника под действием разности давлений в полостях А и Б (  ) можно записать в виде
) можно записать в виде
 , (8.8)
, (8.8)
где Fгд2 – гидродинамическая сила, действующая на золотник со стороны жидкости, протекающей через распределитель; Fтр – сила трения; Fпр – сила, действующая на торцы золотника со стороны пружин; m – масса золотника.
|
|
|
Гидродинамическую силу Fгд2 будем считать линейной зависимостью от смещения золотника и определять по формуле
 , (8.9)
, (8.9)
где  – коэффициент жесткости гидродинамической пружины (гидродинамическая сила имеет линейную зависимость аналогично силе пружины отсюда и название коэффициента).
– коэффициент жесткости гидродинамической пружины (гидродинамическая сила имеет линейную зависимость аналогично силе пружины отсюда и название коэффициента).
Силу трения будем считать вызванной жидкостным трением и определять по формуле
 , (8.10)
, (8.10)
где kтр – коэффициент трения.
Силу от действия пружин на торцы золотника будем определять по формуле
 , (8.11)
, (8.11)
где сПР – жесткость каждой из пружин.
Подставив в уравнение (8.8) выражения для сил, определяемых соотношениями (8.9)–(8.11), и преобразовав его к форме “вход-выход”, получим:
 . (8.12)
. (8.12)
Разделив все члены уравнения (8.12) на коэффициент  при выходной величине x, получим:
при выходной величине x, получим:
 , (8.13)
, (8.13)
где Тгу3 – постоянная времени гидроусилителя;ζгу – коэффициент относительного демпфирования гидроусилителя; Кφ.p – коэффициент преобразования разности давления pу в перемещение золотника x.
|
|
|
Постоянная времени гидроусилителя, коэффициент относительного демпфирования и коэффициент преобразования определяются по соотношениям:
 ; (8.14)
; (8.14)
 ; (8.15)
; (8.15)
 . (8.16)
. (8.16)
Уравнения (8.4) и (8.13) с учетом соотношений (8.5)–(8.7) и (8.14)–(8.16) составляют математическую модель гидравлического усилителя.
При исследовании процессов, протекающих в системах, с помощью ЭВМ и пакетов прикладных программ, основанные на численных методах математическое описание удобнее выполнять в переменных состояния и системы уравнений приводить к дифференциальным уравнениям первого порядка, записанным в форме Коши.
Дифференциальное уравнение (8.13) второго порядка заменим системой двух уравнений первого порядка
 , (8.17)
, (8.17)
 , (8.18)
, (8.18)
где υ – скорость перемещения золотника.
Уравнение (8.4) с учетом формулы (8.17) можно записать в виде
 . (8.19)
. (8.19)
Полученную систему уравнение приведем к форме Коши:
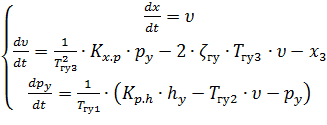 (8.20)
(8.20)
Дата добавления: 2019-09-13; просмотров: 161; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!