Нелинейные математические модели
Одним из примеров нелинейной системы может служить гидравлический механизм, состоящий из золотникового гидрораспределителя и нагруженного гидроцилиндра (рис. 7.3). Составим математическое описание гидравлического механизма, предполагая, что питание его рабочей жидкостью осуществляется при постоянном давлении (pП = const) от источника с неограниченным расходом. Гидролинии от золотникового распределителя к гидроцилиндру будем принимать настолько короткими, чтобы в них можно было бы не учитывать потери давления и волновые процессы.
Для гидрораспределителя, когда окна распределителя имеют равные коэффициенты расхода, при нулевых перекрытиях золотника, без учета утечек и перетечек рабочей жидкости в распределителе, можно записать два уравнения расходов:
 ; (7.14)
; (7.14)
 , (7.15)
, (7.15)
где Q1 – расход рабочей жидкости, втекающей в гидроцилиндр; Q2 – расход рабочей жидкости, вытекающей из гидроцилиндра; mЗ – коэффициент расхода окон золотникового распределителя; bОК – ширина окон во втулке (если окно, расположенное напротив бурта золотника, занимает весь периметр втулки, то bОК = pdЗ; xЗ– смещение золотника от нейтрального положения; pП – давление питания в напорной гидролинии; pСЛ – давление в сливной гидролинии; p1 и p2 – давления в левой и правой полостях гидроцилиндра; r – плотность жидкости.
| xЗ |
| pП |
| pСЛ |
| y |
| p2 |
| p1 |
| 1 |
| 2 |
| F |
| mпр |
| Рис. 7.3. Гидравлический механизм |
|
|
|
Для гидроцилиндра можно записать уравнение движения поршня и уравнения расходов (втекающего и вытекающего):
 ; (7.16)
; (7.16)
 ; (7.17)
; (7.17)
 , (7.18)
, (7.18)
где S – рабочие площади поршня (т.е. площадь поршня минус площадь штока) в левой и правой полостях гидроцилиндра; FТР – сила трения, действующая на поршень и шток; F – внешняя нагрузка; mПР – суммарная масса поршня, штока и приведенной массы рабочих органов, приводимых в движение штоком; yШТ – перемещение штока.
Силу вязкого трения будем определять по соотношению
 . (7.19)
. (7.19)
Внешнюю нагрузку будем определять по соотношению
 . (7.20)
. (7.20)
где cн – коэффициент нагрузки; y – перемещение поршня.
С учетом соотношений (7.19) и (7.20) уравнение (7.16) примет вид
 . (7.21)
. (7.21)
Система уравнений (7.14)–(7.15), (7.17)–(7.18) и (7.21) является нелинейной математической моделью рассматриваемого гидравлического механизма, потому что содержит нелинейные функции (7.14) и (7.15).
При исследовании процессов, протекающих в системах, с помощью нелинейных математических моделей часто приходится применять ЭВМ и пакеты прикладных программ, основанные на численных методах. В этом случае математическое описание удобнее выполнять в переменных состояния и системы уравнений приводить к дифференциальным уравнениям первого порядка, записанным в форме Коши.
|
|
|
Для примера выполним математическое описание процессов, протекающих в гидравлической системе (рис. 7.3) в переменных состояния.
Введем обозначение
 , (7.22)
, (7.22)
где υ – скорость поршня и массы m, так как y – перемещение поршня.
С учетом формулы (7.22) система уравнений (7.14)–(7.15), (7.17)–(7.18) и (7.21) примет вид
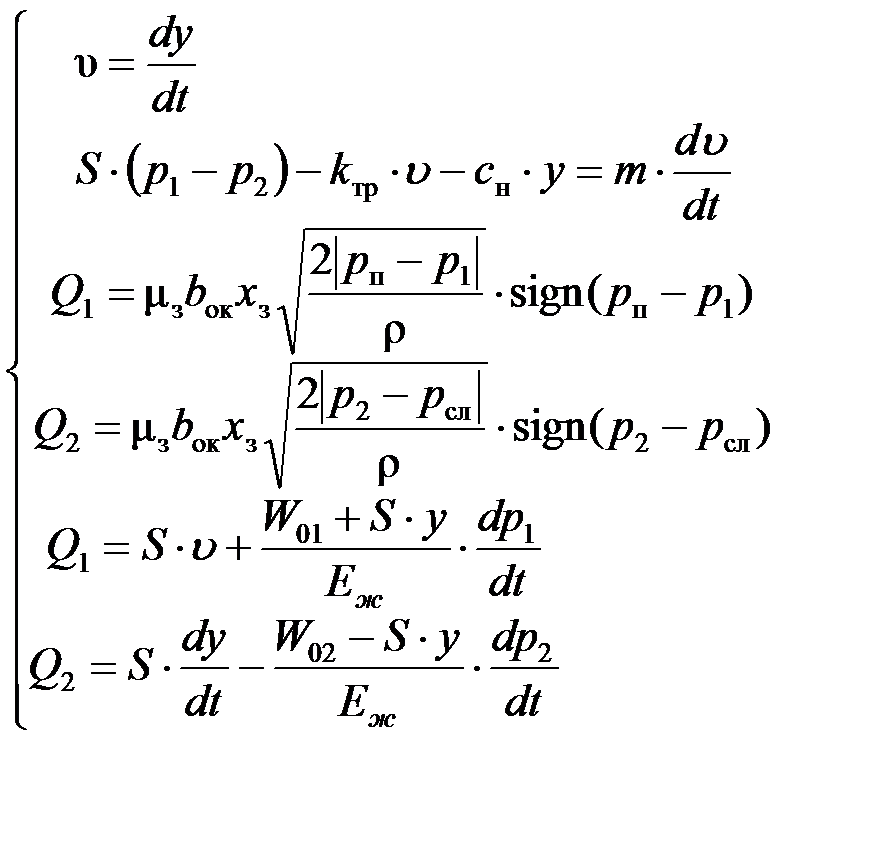 . (7.23)
. (7.23)
В качестве переменных состояний примем y, υ, p1 и p2. Подставим в третье уравнение системы (5.48) выражения для расходов Q1, Q2 и Q3 из четвёртого, пятого и шестого уравнений, затем члены, содержащие производные от переменных состояний, перенесём в левые части уравнений, в результате получим систему дифференциальных уравнений первого порядка в форме Коши:
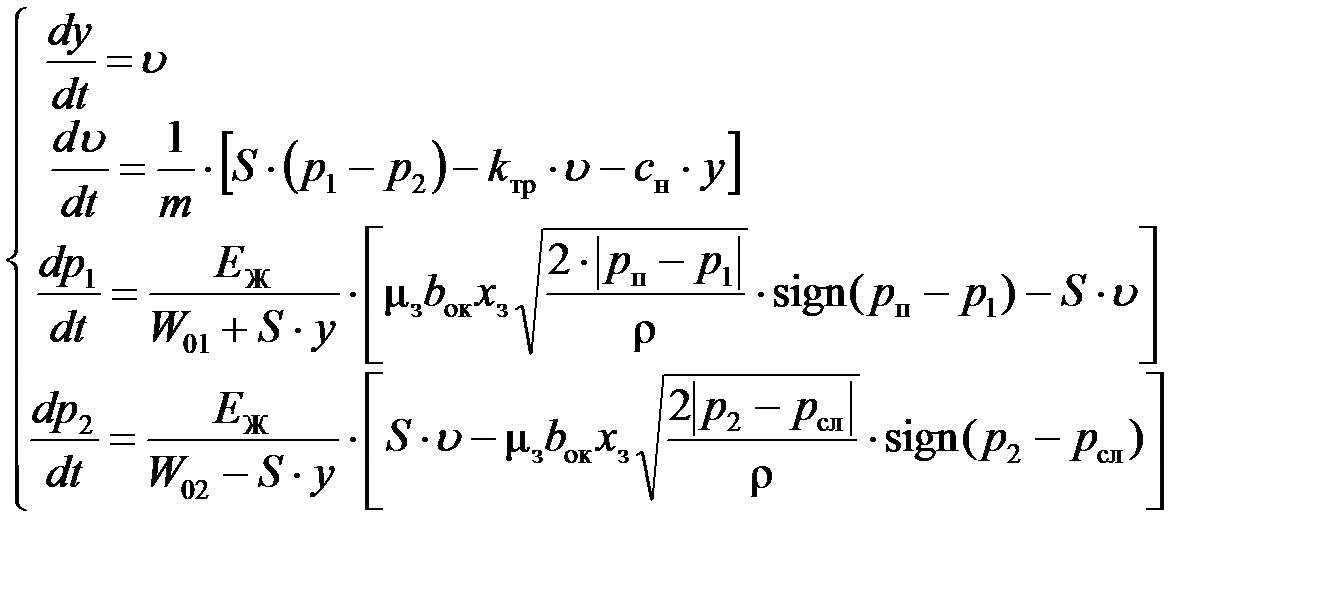 .
.
Дата добавления: 2019-09-13; просмотров: 178; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!