Электроприводы, обеспечивающие в установившемся режиме стабилизацию каких-либо показателей
Эти показатели могут изменяться от возмущающих воздействий.
Самый распространенный случай - стабилизация частоты вращения.
Типовая функциональная схема приведена на рис. 8.7.
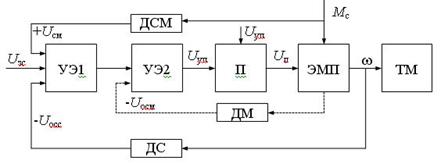
Рис. 8.7. Функциональная схема ЭМС электропривода со стабилизацией частоты вращения
Система является замкнутой. Признак замкнутой системы - обратная связь по основному регулируемому параметру (частоте вращения).
Информация о текущем значении частоты вращения снимается с помощью датчика скорости ДС (в качестве которого может выступать тахогенератор). Сигнал с датчика скорости подается на управляющий элемент УЭ1.
Туда же подается задающий сигнал, пропорциональный требуемому значению установившейся частоты вращения.
Исходя из сравнения, формируется управляющий сигнал, который воздействует на ключи преобразователя и на напряжение, подаваемое на обмотки двигателя.
Например, увеличился момент сопротивления Мс. Частота вращения уменьшается. Сигнал обратной связи уменьшается, разность сигналов на входе УЭ1 возрастает. Это приводит к увеличению управляющего сигнала на входе преобразователя П и, соответственно, напряжения на обмотках двигателя. Частота вращения ЭМП повышается, стремясь к прежнему значению.
В статических системах регулирования новое значение скорости вращения будет несколько меньшим, а в астатических – ровно таким же.
Для повышения точности и быстродействия статических систем регулирования они могут быть дополнены каналом управления по возмущению Мс, который реализуется, например, с помощью датчика статического момента ДСМ, подающего на вход УЭ1 сигнал, пропорциональный Мс.
Несмотря на свою эффективность, электрический привод с каналом управления по возмущению выполняется редко из-за отсутствия простых и надежных датчиков момента нагрузки Мс (возмущающего воздействия) ДСМ.
Чтобы обеспечить хорошие показатели при пуске и торможении в системе дополнительно может использоваться внутренний контур регулирования момента ЭМП, включающий датчик момента ДМ и управляющий элемент УЭ2 (показан штриховой линией).
На рис. 8.8 приведен пример схемы электропривода со стабилизацией частоты вращения с использованием в качестве ЭМП коллекторного ДПТ.
Задача: поддерживать угловую скорость постоянной.
Изменение угловой скорости ДПТ может произойти, например, при изменении момента сопротивления. При этом, согласно уравнению движения:
М-Мс=J  увеличению момента сопротивления будет соответствовать уменьшение угловой скорости.
Новый установившийся режим наступит при равенстве моментов, то есть когда момент двигателя увеличится до значения момента сопротивления. Но это равенство наступит уже при другом (меньшем) значении скорости.
увеличению момента сопротивления будет соответствовать уменьшение угловой скорости.
Новый установившийся режим наступит при равенстве моментов, то есть когда момент двигателя увеличится до значения момента сопротивления. Но это равенство наступит уже при другом (меньшем) значении скорости.
|  Рис. 8.8. Пример функциональной схемы простейшей ЭМС электропривода со стабилизацией частоты
Рис. 8.8. Пример функциональной схемы простейшей ЭМС электропривода со стабилизацией частоты
|
Необходимо вновь повысить скорость двигателя
Запишем выражение для угловой скорости ДПТ:
W=  -
- 
Наиболее эффективным способом изменения скорости является способ, связанный с изменением напряжения питания ДПТ U. В рассматриваемой схеме напряжением питания ДПТ является выходное напряжение коллекторного генератора постоянного тока.
В данном случае генератор выполняет роль преобразователя (П), приведенного на рис. 8.6.
Изменение выходного напряжения генератора в данной схеме производится путем изменения магнитного потока возбуждения генератора:
Uг=сФWг-IягRя
| Изменение магнитного потока осуществляется за счет изменения тока возбуждения. Связь между этими параметрами устанавливается кривой намагничивания (рис.8.9). Номинальные значения тока возбуждения и магнитного потока обычно выбираются в точке А. | 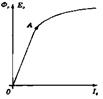 Рис. 8.9. Кривая намагничивания
Рис. 8.9. Кривая намагничивания
|
Чтобы сформировать сигнал на изменение тока возбуждения, необходимо сравнить текущее значение угловой скорости ДПТ и требуемое. Информацию о текущем значении скорости получают с помощью датчика скорости, в качестве которого в этой схеме используется тахогенератор.
Тахогенератор – генератор малой мощности, используемый в качестве датчика частоты вращения. Оценка частоты вращения осуществляется по величине выходного напряжения, которое прямо пропорционально частоте вращения вала.
Требуемое значение напряжения определяет дополнительный источник напряжения, представленный на схеме в виде Еэт.
Напряжение, поступающее на вход усилителя У, определяет напряжение, подводимое к обмотке возбуждения генератора.
где Rу – входное сопротивление усилителя (на рис не показано), а Rр – сопротивление регулировочного реостата (между правой границей и регулировочным движком реостата).
Восстановим всю цепочку изменения параметров системы при регулировании:
Мс n¯ Uтг¯ Uу Iвг Uяг=Uяд n
Если требуется поддерживать другую величину частоты вращения, изменяют величину сопротивления Rр.
Следящие электроприводы
Выполняемая задача: воспроизвести положение рабочего органа механизма в соответствии с входным сигналом, произвольно меняющимся во времени.
В этом отличие от предыдущего варианта, в котором заданный сигнал от времени не зависел.
В качестве примера можно назвать ЭП, у которого выходной вал повторяет ("отслеживает") движение входного (задающего) вала, не принадлежащего данной машине.
Пример области применения: перемещение антенн локаторов и телескопов при слежении за перемещающимися в пространстве объектами [7].
Функциональная схема приведена на рис. 8.10.
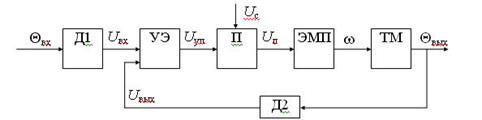
Рис. 8.10. Функциональная схема ЭМС электропривода в следящем режиме (следящий электропривод)
У следящих электроприводов система всегда замкнутая.
Сигналы, пропорциональные углам поворота входного и выходного валов, вырабатывают датчики Д1 и Д2.
Эти сигналы сравниваются между собой в управляющем элементе УЭ.
По результатам сравнения текущего и заданного сигналов УЭ формирует управляющий сигнал Uу.п для преобразователя П, воздействующего на ЭМП.
Система стремится поддержать угол рассогласования близким к нулю.
Некоторые классификационные виды следящих электроприводов.
Скоростной следящий ЭП: предназначен для воспроизведения с заданной точностью скорости движения исполнительного органа.
Позиционный следящий ЭП: предназначен для воспроизведения с заданной точностью положения исполнительного органа.
Следящий ЭП непрерывного действия: напряжение, пропорциональное сигналу рассогласования, постоянно подается на двигатель.
Следящий ЭП релейного действия: напряжение на двигатель подается только в том случае, когда сигнал рассогласования достигает определенного значения. Таким образом, работа релейного следящего ЭП характеризуется определенной зоной нечувствительности по отношению к входному сигналу.
Следящий ЭП с импульсным управлением: управляющее воздействие на двигатель подается в виде импульсов напряжения, амплитуда, частота или заполнение которых изменяется в зависимости от сигнала рассогласования. В этих случаях говорят соответственно об амплитудно-частотно и широтно-импульсной модуляции сигнала управления.
Дата добавления: 2019-09-13; просмотров: 360; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!