ДОСТОИНСТВА И НЕДОСТАТКИ ОБЪЕМНЫХ ПРИВОДОВ
Достоинства и недостатки объемного гидропривода
Простота реализации очень больших сил и моментов на выходных звеньях приводов с помощью гидродвигателей с небольшими размерами – основное достоинство гидроприводов. Оно является решающим преимуществом перед другими видами приводов, работающих с очень большими нагрузками или имеющих массивные рабочие органы.
Гидропривод привлекает конструкторов возможностью получения бесступенчатого регулирования скоростей рабочих органов с помощью простых и дешевых устройств – дросселей. При необходимости скорость может быть стабилизирована, т.е. выполнена независимой от внешних сил, действующих на рабочий орган. Такая стабилизация достигается также с помощью простых и дешевых устройств – регуляторов расхода. Очень важной характеристикой регулирования линейных и угловых скоростей с помощью дросселей и регуляторов расхода является большой диапазон регулирования D = 1000 … 1500.
Еще одним преимуществом гидропривода является возможность разгрузки рабочих органов технологического оборудования от сил веса. Классическим видом разгрузки является подвешивание через блоки на тросах чугунной или бетонной конструкции, имеющей такой же вес, как и рабочий орган (рис.1.15, а). Располагается такая конструкция, как правило, в станине технологического оборудования, что сужает функциональные возможности оборудования. Обрыв троса или нарушение закрепления его концов может привести к аварийной ситуации. Гидропривод лишен этих недостатков. Радиальные размеры уравновешивающих цилиндров значительно меньше аналогичных размеров стальных и бетонных конструкций. А тип уравновешивающих цилиндров (плунжерные) обеспечивает надежное крепление с рабочим органом, высокую осевую жесткость и устойчивость (рис.1.15, б).
|
|
|
Достоинством гидравлических и пневматических приводов является возможность достижения линейных возвратно-поступательных движений рабочих органов технологического оборудования без дополнительных кинематических передач – с помощью цилиндров. При этом шток цилиндра соединяется непосредственно с рабочим органом.

а) б)
Рис. 1.15
В электромеханическом приводе для линейных перемещений применяют электродвигатель и одну из кинематических пар – рейку с зубчатым колесом, винт с гайкой, червяк с червячной рейкой. Габариты таких передач значительно больше габаритов цилиндров.
К достоинствам гидропривода также относят простоту автоматизации, возможность получения плавного реверса рабочих органов оборудования, высокое быстродействие, простоту устройств защиты привода от перегрузок, самосмазываемость
|
|
|
Недостатками гидропривода являются: сравнительно низкий коэффициент полезного действия; утечки масла через щели гидроаппаратов; сжимаемость масла, иногда приводящая к колебаниям рабочих органов; огнеопасность масел.
Достоинства и недостатки объемного пневмопривода
С помощью пневмопривода реализуются очень большие скорости движений рабочих органов – более 15 м/с для линейных скоростей и более 100000 об/мин - для угловых. Пневмоприводы обеспечивают надежную работу технологического оборудования в цехах с высокой запыленностью, влажностью и пожароопасностью. Объемный пневмопривод – это единственный привод, с помощью которого можно создавать конструкции захватных вакуумметрических устройств для работы с деталями, изготовленными из любого металла, стекла, пластмасс. Объемный пневмопривод легко автоматизируется. При этом статические и динамические характеристики его значительно улучшаются.
Недостатками пневмопривода являются: большая сжимаемость рабочих сред, приводящая к нестабильной скорости рабочих органов; небольшой диапазон регулирования скоростей (неавтоматизированного); низкая точность позиционирования при работе по конечным выключателям (неавтоматизированного).
|
|
|
НАСОСЫ И ГИДРОДВИГАТЕЛИ
В гидроприводах станков, роботов и транспортных систем применяются роторные объемные гидромашины: насосы – поршневые и пластинчатые; гидромоторы – поршневые.
ОБЪЕМНЫЕ ГИДРОНАСОСЫ
В пластинчатом насосе однократного действия (рис. 2.1, а) ротор 1 устанавливается в статоре 2 с эксцентриситетом e. В пазах ротора расположены вытеснители – пластины 3. С торцов ротор и пластины прижаты дисками (на схеме не показаны) так, что объёмы между двумя пластинами, ротором, статором и дисками оказываются замкнутыми и герметичными. В дисках выполнены серповидные пазы А и Б, по которым в камеры подводится (паз А) и отводится (паз Б) рабочая жидкость под давлением p1 и p2,при этом у самовсасывающих насосов давление p1 равно или ниже атмосферного.
При вращении ротора пластины прижимаются к статору центробежной силой и давлением масла. При повороте ротора на угол 0  …180 градусов
…180 градусов  объём замкнутых камер увеличивается, а давление p1 становится ниже атмосферного. За счёт образовавшейся разности давлений – атмосферного и пониженного (вакуумметрического) – через паз А камеры заполняются рабочей жидкостью. При дальнейшем повороте ротора на угол 180 …360 градусов объём камер насоса уменьшается и происходит вытеснение жидкости через паз Б. Давление p2, определяемое гидравлическим сопротивлением в напорной гидролинии насоса, всегда больше давления p1. Поэтому равнодействующая сила, определяемая давлением p2 и площадью боковой поверхности ротора на угле 180 …360 градусов, будет направлена сверху вниз, нагружая опоры приводного вала.
объём замкнутых камер увеличивается, а давление p1 становится ниже атмосферного. За счёт образовавшейся разности давлений – атмосферного и пониженного (вакуумметрического) – через паз А камеры заполняются рабочей жидкостью. При дальнейшем повороте ротора на угол 180 …360 градусов объём камер насоса уменьшается и происходит вытеснение жидкости через паз Б. Давление p2, определяемое гидравлическим сопротивлением в напорной гидролинии насоса, всегда больше давления p1. Поэтому равнодействующая сила, определяемая давлением p2 и площадью боковой поверхности ротора на угле 180 …360 градусов, будет направлена сверху вниз, нагружая опоры приводного вала.
|
|
|
Этот недостаток пластинчатых насосов однократного действия отсутствует в насосах двукратного действия (рис.2.1, б). Ротор 1 и статор 2 расположены соосно, без эксцентриситета. Поэтому, при вращении ротора против часовой стрелки, фазам всасывания будут соответствовать углы 0 …90 градусов
(паз А) и 180 …270 градусов (паз В), а фазам вытеснения жидкости углы 90  …180 градусов (паз Б) и 270 …360 градусов (паз Г).
…180 градусов (паз Б) и 270 …360 градусов (паз Г).

Рис. 2.1
Как видно из рисунка камеры вытеснения расположены с противоположных сторон ротора. Следовательно, ротор и приводной вал уравновешены радиальными силами, создаваемыми давлением масла при работе насоса. Это даёт возможность увеличить номинальное давление насоса и его долговечность. Такие насосы имеют постоянную теоретическую подачу Qт, м3/с, определяемую рабочим объёмом Vо, м3/об, подаваемой жидкости
Qт = Vо n = 2 b n (π (R2 – r2) – ( R – r ) s z / (cosa)), (2.1)
где n – частота вращения ротора, с-1; b, s – ширина и толщина пластины, мм;
z – число пластин; R, r - большой и малый радиусы статора, м; a - угол наклона пластины к радиусу.
Теоретическая подача насоса однократного действия, м3/с:
Qт = Vо n = 2 b e (π D – s z), (2.2)
где D – внутренний диаметр статора, м; e – эксцентриситет, м.
Из сравнения формул (2.1) и (2.2) видно, что в насосах однократного действия подачу рабочей жидкости можно регулировать, изменяя величину эксцентриситета e. Частота n вращения ротора в насосах, применяемых в РТС, остаётся постоянной. Такие насосы называются регулируемыми. Уменьшение подачи насоса (рис.2.1, а) достигается смещением статора 2 влево. При уменьшении эксцентриситета до нуля подача тоже будет уменьшаться, а при смене знака эксцентриситета и постоянном направлении вращения ротора подача жидкости будет расти, но направление потока сменится на обратное, реверсируется. Камеры, связанные с пазом Б, будут всасывающими, нижние камеры – вытесняющими. Такие насосы называются регулируемыми и реверсируемыми. Максимальное перемещение ротора влево и вправо ограничивается жёсткими упорами. Управление подачей насоса может осуществляться давлением в гидролиниях привода от УЧПУ или вручную.
Действительная подача Q  насоса меньше теоретической на величину объёмных потерь – перетечек жидкости из напорной гидролинии в сливную, учитываемых с помощью объёмного коэффициента полезного действия ηo:
насоса меньше теоретической на величину объёмных потерь – перетечек жидкости из напорной гидролинии в сливную, учитываемых с помощью объёмного коэффициента полезного действия ηo:
Q = V  n ηo . (2.3)
n ηo . (2.3)
Величина объёмных потерь растёт с увеличением давления в напорной гидролинии. Статическая характеристика регулируемого по давлению насоса показана на рис.2.1, в. При давлении p = 0 подача насоса близка к теоретической Qт. С увеличением давления подача уменьшается, а в точке А срабатывает регулятор насоса, представляющий собой, например, пружину с регулируемой жёсткостью, установленную с левой стороны статора, (рис.2.1, а).
Давлением жидкости статор смещается влево, сжимая пружину, и при давлении p3 подача насоса становится равной нулю. Изменение статических характеристик обеспечивается изменением жёсткости пружины, регулировкой упора с правой стороны статора или управлением положения статора с помощью гидроцилиндров. Давление в гидроцилиндрах может изменяться автоматически или оператором вручную.
Номинальная мощность N (Вт) на валу насоса определяется произведением номинальной подачи Qн, м3/с и номинального давления pн , Па:
N = Qн pн / η, (2.4)
где η = ηo ηм , ηм - механический КПД насоса, выражающий относительную долю механических потерь.
Условное обозначение на принципиальных гидросхемах регулируемых насосов показано на рис. 2.1, г.
Автоматическую регулировку подачи имеют пластинчатые насосы типа Г12 – 5М с номинальной подачей 25…105 л/мин и давлением 6,3 МПа. Объёмный КПД насосов ηo= 0,85…0,9; общий КПД η = 0,73…0,67 [1].
Регулируемые пластинчатые насосы типа НПлР имеют номинальную подачу 24…152 л/мин, номинальное давление на выходе 16 МПа, диапазон регулирования давления 6,3…16 МПа, ηo= 0,82…0,84 , η = 0,73…0,67.
Насосы пластинчатые нерегулируемые типов Г12 -2М, Г12 – 3М, БГ12 – 4 выпускаются на номинальное давление 6,3 МПа с номинальной подачей 5,8…204 л/мин, ηo= 0,76…0,92, η = 0,58…0,85.
Насосы БГ12 – 2М имеют: Qн = 5…80 л/мин, pн = 10,5МПа, ηo= 0,72…0,9, ηo= 0,55…0,85.
Нерегулируемые пластинчатые насосы выполняются однопоточными и двухпоточными. В двухпоточных насосах в общем корпусе расположены два насоса с приводом от общего вала. Подачи насосов могут быть одинаковыми и разными, выходные потоки независимые, входные объединены.
Из поршневых насосов в гидроприводах РТС нашли широкое применение аксиально-поршневые, рис.2.2. Насос состоит из барабана 1 с толкателями 2, наклонной шайбы 3, ротора 4 с поршнями 5, опорно-распределительного диска 6, штоков 7,8 и приводного вала 9, соединённого через шпонку с барабаном 1. Наклонная шайба 3 и опорно-распределительный диск 6 соединены с корпусом, причём шайба может поворачиваться на угол α. Ротор 4 соединяется с барабаном 1 торцевой шпонкой и может самоустанавливаться относительно опорно-распределительного диска 6.

Рис. 2.2
При вращении барабана 1 толкатели 2 и поршни 5 совершают возвратно-поступательные движения, всасывая масло при движении к шайбе, и вытесняя – при обратном ходе. В цикле всасывания масло в рабочие камеры ротора 4 подаётся под давлением p1 от вспомогательного насоса подпитки. Действительная подача насоса
Qд = pd2D tga z n ηo / 4 , (2.5)
где d – диаметр поршня; D – диаметр окружности, на которой расположены поршни в роторе; a - угол наклона шайбы; z - число поршней.
Шайба поворачивается либо управляющими поршнями через штоки 7 и 8 – в насосах типа 2Г15 – 1, либо траверсой – в насосах типа Г13 – 3М. Поршни и траверса управляются давлением в напорной гидролинии, а траверса кроме этого может управляться вручную.
Насосы 2Г15 – 1 выпускаются с подачей 0…68 л/мин при частоте вращения ротора 960 об/мин, с номинальным давлением 6,3 МПа и временем переходного процесса 0,1с [1].
Насосы Г13 – 3М имеют подачу 10…100 и 20…200 л/мин; номинальное давление 16МПа, время реверса потока масла 0,3с, ηo=0,95…0,96 и η= 0,88…0,85.
ОБЪЕМНЫЕ ГИДРОДВИГАТЕЛИ
По движению выходного звена различают гидромоторы, имеющие неограниченное вращательное движение выходного звена, поворотные гидродвигатели с ограниченным поворотным движением выходного звена и гидроцилиндры, выходное звено (шток) которых совершает возвратно–поступательное движение.
Гидромоторы
Из гидромоторов в приводах РТС чаще применяются поршневые, обладающие высокими значениями крутящего момента, широким диапазоном частоты вращения, низкими устойчивыми частотами вращения и высокими показателями качества переходных процессов. По ГОСТ 17752 – 81 их классифицируют по углу между осями блока и поршня на аксиально-поршневые, у которых оси поршней расположены к оси блока под углом не более 45О и на радиально-поршневые, оси поршней которых расположены под углом более 45о к оси блока цилиндров. По способу передачи движения аксиально-поршневые делят: на гидромоторы с наклонным блоком, у которых оси выходного звена и блока цилиндров пересекаются; гидромоторы с наклонным диском, выходное звено которых расположено на одной оси с блоком цилиндров, а поршни связаны с торцовой поверхностью диска, наклонённого к этой оси; гидромоторы с профильным диском.
Радиально-поршневые кулачковые гидромоторы по расположению кулачка подразделяются на гидромоторы с внешним кулачком, кулачок которых расположен вокруг поршней, и на гидромоторы с внутренним кулачком, у которых поршни расположены вокруг кулачка.
Принцип работы аксиально-поршневого гидромотора с наклонной шайбой иллюстрируется схемой рис.2.3. Так же, как и в аналогичном насосе, шайба 1 установлена в корпусе под углом a к оси блока 2 цилиндров. В нерегулируемом гидромоторе шайба 1 неподвижна. Под поршни 3 подаётся масло под высоким давлением р1 и вытесняется ими под низким давлением р2.

Рис.2.3.
Поршни, находящиеся под давлением р1, действуют на наклонную поверхность шайбы с силой F p = р1 S, где S – площадь торцевой поверхности поршня, м2. Тангенциальная составляющая Fт реактивной силы Fт = Fр tga = р1 S tga.
Крутящий момент на валу гидромотора от действия силы Fт на радиусе r:
M F = Fт r = р1 S tga D sinφ/2.
Без учёта сил трения и инерции среднее значение крутящего момента, развиваемого гидромотором, может быть рассчитано по формуле, Нм:
M = (р1 - р2) z S D tga/ (2π) , (2.6)
где z – число поршней; р1, р2 – давления в напорной и сливной линиях гидромотора, Па, D – диаметр, на котором расположены поршни, м.
Нерегулируемые аксиально-поршневые гидромоторы типа Г15 – 2 имеют номинальный крутящий момент 9,4…136 Нм, в зависимости от размера; номинальное давление 6,3 МПа; диапазон частот вращения выходного вала – 60…90 при номинальном моменте и более 2000 – при крутящем моменте не более 0,7 Мном; время реверса 0,03…0,3 с [1].
В аксиально-поршневом гидромоторе с наклонным блоком (рис.2.4) блок цилиндров 1 передаёт вращение выходному валу 2, расположенному под углом a к блоку 1 и соединённому с ним карданом 3. Принцип работы гидромотора аналогичен гидромотору с наклонной шайбой, а среднее значение крутящего момента рассчитывается по формуле
M = (р1 - р2) z S D sina/ (2p) (2.7)

Рис. 2.4
Блок цилиндров 1 соединяется с выходным валом 2 с помощью кардана 3. Вал 2 гидромотора, нагруженный значительными по величине осевыми и радиальными силами, имеет развитую опору, состоящую из радиально-упорных 4 и радиального 5 подшипников. Такая опора имеет размеры, одинаковые с размерами блока цилиндров 1. Поэтому при более высоком механическом КПД и передаваемом крутящем моменте, при одинаковом числе поршней и их диаметре, гидромотор с наклонным блоком имеет большие габариты в сравнении с гидромотором с наклонной шайбой.
Нерегулируемые гидромоторы 310 выпускают мощностью до 75 кВт, с номинальным давлением 20 МПа, номинальным крутящим моментом - до 748 Нм, минимальной частотой вращения вала – 50 об/мин [1]. Номинальная мощность регулируемых аксиально-поршневых гидромоторов 303 – 16.7…60 кВт, крутящий момент – 84…475 Нм, номинальное давление – 20 МПа, минимальная частота вращения вала – 50 об/мин.
ОАО «Омскгидропривод» по лицензии фирмы Danfoss выпускает героторные гидромоторы МГП с рабочим объемом 80…315 см3, крутящим моментом 150…300 Нм, частотами вращения 10…800, 10…210 об/мин в зависимости от исполнения, номинальным давлением 20 МПа [1].
Высокомоментные радиально-поршневые гидромоторы (рис.2.5), обеспечивают высокие крутящие моменты при небольших оборотах, что позволяет компоновать их непосредственно с рабочим органом РТК без редуктора.
Выходной вал 1 гидромотора в плоскости расположения поршней имеет поясок с эксцентриситетом е. Давлением масла р1 в напорной гидролинии поршни 2, 3, 4 через шатуны 5 и башмаки 6 воздействуют на выходной вал с силой F, создавая крутящий момент М. При этом поршни 7, 8, 9 вытесняют масло под давлением р2 в сливную гидролинию. Поршень 10, находящийся в верхней мёртвой точке, не потребляет и не вытесняет масло.
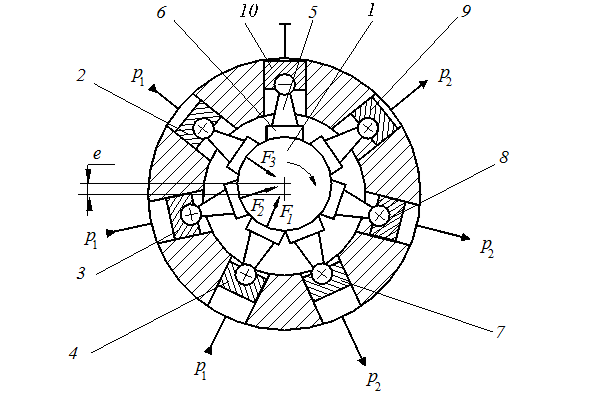
Рис.2.5
Каждый из поршней подключается к напорной и сливной линиям с помощью золотниковых распределителей, управляемых от кулачка, расположенного на выходном валу 1.
Гидромоторы типа МРФ и МР имеют по две группы поршней, управляемых от двух эксцентриковых поясков. Номинальное давление – 32 МПа; частота вращения – 4…960 об/мин; крутящий момент:
M = (р1 - р2) S 2 e z k /(2π), (2.8)
где k – кратность.
Поворотные гидродвигатели
По виду рабочего органа различают шиберные, поршневые и мембранные поворотные гидродвигатели. Шиберный гидродвигатель (рис.2.6) состоит из корпуса 1, выходного вала 2, шибера 3, неподвижной перегородки 4 и двух торцовых крышек. Если масло под давлением р1> р2 подводится так, как показано на рис.2.6., то гидростатическая сила F = (р1 - р2) (R - r) b создаёт на выходном валу 2 крутящий момент М и шибер 3 поворачивается по часовой стрелке. Обратный поворот вала возможен после соединения камеры б с напорной, а камеры а - со сливной гидролиниями .
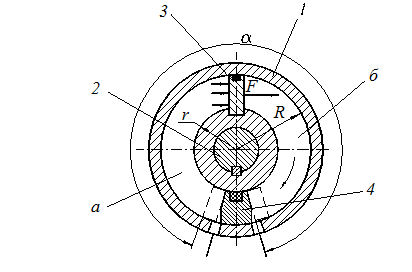
Рис. 2.6
Крутящий момент на выходном валу, Нм:
M = (р1 - р2) (R2 – r2) b η / 2, (2.9)
где R, r – радиусы корпуса и вала (рис.2.6.), м; b - ширина шибера, м; η - полный КПД гидродвигателя.
Угловая скорость поворота выходного вала, с-1 , определяется расходом масла Q, м3/с, в гидродвигатель, площадью лопасти (R - r) b, и радиусом (R + r)/2, м:
ω = 2 Q / ((R2 – r2) b). (2.10)
Поворотные гидродвигатели типа ДПГ имеют максимальный угол поворота шибера α = 270о; номинальный крутящий момент в зависимости от размера составляет 160…2000 Нм, номинальное давление р1=16 МПа, максимальную скорость поворота вала 180 o/с.
Поршневой поворотный гидродвигатель (рис.2.7, а) представляет собой гидроцилиндр 1, в котором находятся два поршня 2, 3 с общим штоком 4, зубчатое колесо 5 и опора 6. Зубчатое колесо находится в зацеплении с зубчатой рейкой, нарезанной на штоке 4, и соединяется с выходным валом 7. При подаче масла в левую камеру гидродвигателя поршни и шток будут двигаться вправо, поворачивая выходной вал по часовой стрелке. Обратное движение достигается после подачи масла в правую камеру гидродвигателя. Конечное положение выходного вала определяется жёстким регулируемым упором 8 или нерегулируемым упором 9. Так как площади S, м2, поршней одинаковы, то крутящий момент М, Нм, и угловая скорость ω, с-1, тоже будут одинаковыми при повороте вала в прямом и обратном направлениях:
M = (р1 - р2) S D / 2 , (2.11)
ω =2 Q / (S D), (2.12)
где D – диаметр делительной окружности шестерни, м; Q – расход масла в гидродвигатель , м3/с; р1 и р2 - давления в напорной и сливной линиях, Па.

Рис. 2.7
Иногда, из конструктивных соображений, применяют поворотные гидродвигатели с одним поршнем (рис.2.7, б). Как видно из рисунка, площади поршня не равны S1>S2. Поэтому крутящий момент при повороте выходного вала по часовой стрелке, согласно зависимости (2.11), будет больше крутящего момента при повороте вала в обратном направлении, при одних и тех же значениях давлений (р1 - р2). Угловая скорость при повороте вала по часовой стрелке будет меньше, чем при обратном, при условии одинакового расхода Q (2.12). Однако эти отличия нельзя считать недостатками. В некоторых случаях применение таких гидродвигателей позволяет сократить число гидроаппаратов.
Гидроцилиндры
Гидроцилиндры относят к наиболее часто применяемому виду гидродвигателей. Предпочтение, отдаваемое им конструктором, определяется достоинствами гидроцилиндров. Они не нуждаются в дополнительных преобразующих устройствах при реализации линейных возвратно – поступательных движений рабочих органов. Гидроцилиндры развивают любые, необходимые для перемещения рабочих органов РТС, тянущие и толкающие усилия. Радиальные размеры гидроцилиндров – минимальные из гидро-, электро-, пневмодвигателей (при одинаковой мощности). По простоте изготовления с ними конкурируют только пневмоцилиндры. Гидроцилиндры обладают высокой жёсткостью, имеют высокий коэффициент полезного действия η = 0,95.
Гидро(пневмо)цилиндры имеют ограниченные линейные размеры, часто определяемые устойчивостью. При действии на шток радиальной силы происходит интенсивный износ уплотнений штока и, как следствие, увеличение утечек масла, уменьшение тяговой силы. Гидро (пневмо) цилиндры классифицируют по следующим признакам: по направлению действия рабочей среды - на цилиндры одно стороннего и двухстороннего действия.
В гидроцилиндрах одностороннего действия (рис.2.8, а) движение выходного звена под действием рабочей среды возможно только в одном направлении. Обратно поршень возвращается пружиной.
Толкающее усилие F гидроцилиндра без учёта трения определяется произведением давления p на площадь S поршня, F = p S, а скорость q штока – отношением расхода Q масла к площади S поршня q = Q / S. Сила пружины выбирается из условия Fпр > Fтр, где Fтр – полная сила трения в уплотнениях поршня и штока. Штоковая камера соединяется с гидробаком трубопроводом,  отводящим утечки масла через уплотнения поршня.
отводящим утечки масла через уплотнения поршня.
В гидроцилиндрах одностороннего действия поршень может перемещаться в обратном направлении не только пружиной. Реверс его возможен под действием силы тяжести или внешней силы (рис.2.9, б). Такие цилиндры часто применяют для уравновешивания тяжёлых рабочих органов, перемещаемых в вертикальной плоскости электромеханическим или гидравлическим приводом. При подаче масла в цилиндр плунжер поднимает рабочий орган с силой F = p S , если сила нагрузки Fн меньше силы F. Для опускания рабочего органа уменьшают давление p.
В гидроцилиндрах двухстороннего действия (рис.2.8, в, г) движение штока в обоих направлениях возможно под действием давления масла. Гидроцилиндры, показанные на этих рисунках, отличаются по конструкции и по основным параметрам. Тяговая сила цилиндра с двухстороннем штоком (рис.2.8, г) в обоих направлениях одинакова F = (р1 - р2)S , где S = π(D2 – d2)/4, D - диаметр поршня, d - диаметр штока, р2– давление масла в камере цилиндра, из которой оно вытесняется поршнем. Это утверждение справедливо при условии равенства разности давлений ( р1 - р2 ) для движения поршня как вправо , так и влево. При этом предполагается, что для движения поршня влево давление р1 подаётся в правую, напорную камеру, а давление р2 создаётся в левой, сливной. Скорости при движении поршня вправо и влево тоже равны q = Q/S.
Расстояние L от конечного положения левого штока до конечного положения правого приблизительно равны трём длинам цилиндра, а точнее L = l1+2 l2, где l2 - расстояние от торца цилиндра до конечного положения штока, L ≈ 3 l1.
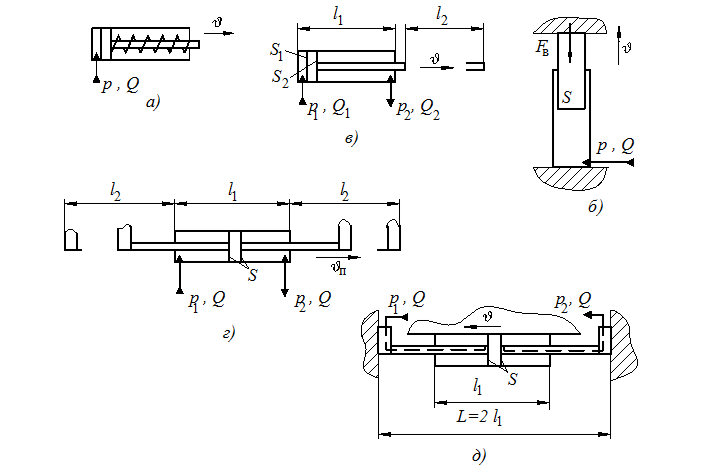
Рис. 2.8
Иногда применяют цилиндры с закреплёнными неподвижно штоками и подвижной гильзой (рис.2.8, д). Масло в камеры цилиндра подаётся через отверстия в штоках. Размер L таких цилиндров меньше, чем в цилиндрах с подвижным поршнем и составляет примерно две длины цилиндра L = 2 l1.
Гидроцилиндры с односторонним штоком (рис.2.8, в) имеют разные рабочие площади поршня: поршневая – S1= πD2/4, штоковая – S2= π (D2 – d2) /4. Поэтому тяговые силы и скорости поршня при его движении влево и вправо разные:
F1= S1 р1 – S2 р2, q1=Q/S1 ; F2= S2 р1 – S1 р2 , q2= Q/S2.
На рис.2.9, а штоковая и поршневая камеры разъединены. Поэтому при подаче масла в штоковую камеру поршень перемещается влево. На рис. 2.9, б эти камеры соединены с напорной гидролинией. Будет ли двигаться поршень цилиндра и если будет, то в каком направлении? В виду разных площадей S1 и S2 при одном и том же давлении р в камерах равнодействующая тяговая сила F будет направлена вправо и поршень должен двигаться в этом направлении.. Вытесняемое из штоковой камеры масло в объёме Qш = S2qп подаётся в поршневую камеру. К расходу Qн добавляется подача Qш и скорость поршня вправо определяется их суммой qп= (Qн+Qш)/S1. Другими словами, подобное соединение камер цилиндра позволяет увеличить скорость поршня вправо по сравнению с соединением (рис.2.9, а).

Рис. 2.9
Можно ли достичь равенства скоростей qп и qл , соединяя поршневую и штоковую камеры? Для ответа на этот вопрос необходимо выразить скорости поршня qп и qл через параметры гидроцилиндра и приравнять полученные выражения.
Движение поршня влево возможно (рис.2.9, а) со скоростью
qл = Qн / S2 , (2.13)
а вправо – со скоростью
qп = (Qн+Qш) / S1= (Qн+S2qп) / S1 .
После упрощения этого выражения: qп = Qн / (S1- S2) . (2.14)
Выразим площади S1 и S2 через диаметры D, d поршня и штока:
qп = 4 Qн /(π (D2 – d2)); (2.15)
qл = 4 Qн / (π d2) . (2.16)
Если приравняем выражения (2.15) и (2.16), то получим условие равенства скоростей qп = qл :
d @ 0,7 D . (2.17)
По числу позиций, занимаемых штоком, различают двух- и многопозиционные цилиндры. Цилиндры, рассмотренные до сих пор, относятся к двухпозиционным.
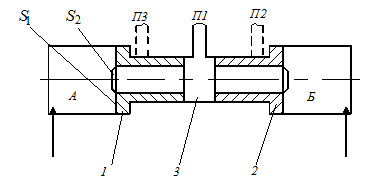
Рис. 2.10
Трёхпозиционный цилиндр схематично изображён на рис.2.10. Он имеет два независимых поршня 1, 2 и шток 3, взаимодействующий средней частью с рабочим органом (блоком зубчатых колёс). Предположим, что шток с рабочим органом находятся в среднем положении (в позиции П1), так, как это изображено на рис.2.10. Если подать масло в камеру А, то шток с рабочим органом и поршнем 2 переместятся в крайнее правое положение (позицию П2). Поршень 1 при этом остаётся неподвижным в крайнем правом положении. Если подать масло в обе камеры А и Б, то при одинаковом давлении масла в камерах поршень 2 переместит шток 3 с рабочим органом в среднее положение (позицию П1). Ход их ограничивается упором поршня 2 в цилиндре. Если масло подать только в камеру Б, то шток 3 переместит рабочий орган в позицию П3, сместив одновременно в левое крайнее положение поршень 1.
По характеру хода выходного звена гидроцилиндры делят на одноступенчатые и телескопические. У первых полный ход выходного звена равен ходу рабочего звена, у телескопических – полный ход выходного звена определяется суммой ходов всех рабочих звеньев. Одноступенчатые гидроцилиндры показаны на рис.2.8, а телескопические – на рис.2.11.
Двухступенчатый телескопический гидроцилиндр (рис.2.11, а) имеет два поршня диаметрами D 1 и D 2. Шток первой ступени (поршень диаметром D 1) крепится к неподвижной части какого – либо агрегата, а цилиндр – к подвижной. Масло в цилиндр подаётся по осевому каналу в штоке первой ступени. После выдвижения цилиндра до упора в поршень он будет перемещать влево поршень второй ступени до упора в поршень первой ступени. Полный ход цилиндра равен сумме ходов. Масло из штоковых камер вытесняется через радиальное отверстие в штоке второй ступени и осевое отверстие в штоке первой. Обратный ход цилиндра возможен при реверсе потока масла – подаче его в штоковые камеры.
Трёхступенчатый телескопический гидроцилиндр (рис. 2.11, б) имеет три поршня с диаметрами D 1, D 2 и D 3. Корпус гидроцилиндра крепится к неподвижной части агрегата, а шток первой ступени – к подвижной. Для выдвижения штока вправо необходимо подать масло в поршневые камеры цилиндра. Этот гидроцилиндр отличается от двухступенчатого (рис 2.11, а) тем, что он одностороннего действия. Поэтому обратный ход штоков возможен только под действием внешней силы F.
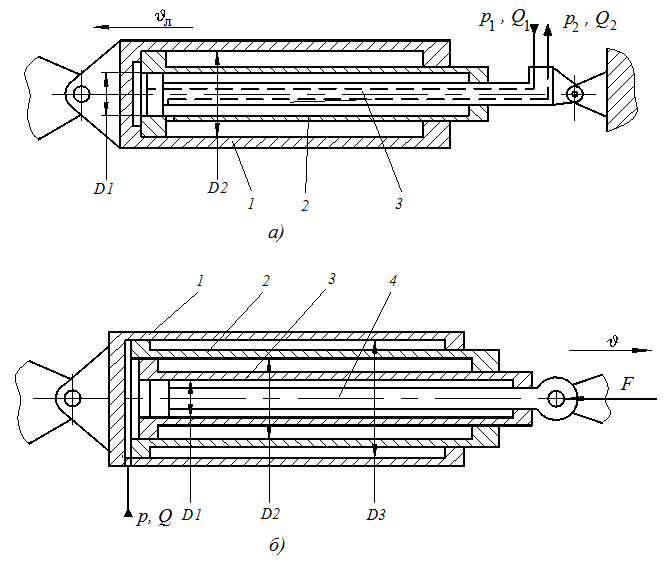
Рис. 2.11
По возможности торможения гидроцилиндры выполняются с торможением выходного звена в конце хода и без торможения. В гидроцилиндре с торможением (рис.2.12) шток у поршня имеет утолщение (диаметр D 3), а в корпусе цилиндра выполнены аналогичные отверстия. В крышки цилиндра встроены обратные клапаны К01, К02 и дроссели Др1, Др2. При подаче масла, например, в штоковую камеру цилиндра поршень перемещается быстро влево до тех пор, пока шток с диаметром D 3 не войдёт в отверстие левой крышки. После этого вытеснение масла из камеры В будет возможно только через тонкое отверстие в дросселе Др1. Объём вытесняемого масла в единицу времени уменьшится, следовательно, скорость поршня тоже уменьшится. В результате поршень достигнет своего конечного положения без сильного удара в крышку цилиндра. Аналогично будет происходить торможение поршня при подходе к правой крышке.
Основные параметры гидроцилиндров регламентируются ГОСТ 6540-68: диаметры поршня, начиная с 10 мм, увеличиваются по геометрической прогрессии со знаменателем ряда 1,26; Dmax = 800 мм. Диаметры штока d изменяются по тому же закону, но минимальный диаметр штока равен 4 мм, dmax = 800 мм. Ход поршня так же, как и диаметры штока, увеличивается по геометрической прогрессии, с 4 мм до 8000 мм.
Гидроцилиндры типа ЦРГ с односторонним штоком выпускаются на номинальное давление 16 МПа с расчётной скоростью поршня 1,5 м/с. Ход поршня в зависимости от диаметров поршня и штока варьируется в пределах 100…1200 мм.

Рис. 2.12
Давление страгивания и холостого хода не превышает 1 МПа. Полный КПД не менее 0,95 [ 1 ].
Гидроцилиндры по ГОСТ Г29-1-77 для зажимных и фиксирующих устройств агрегатных станков и автоматических линий рассчитаны на номинальное давление 10 МПа, имеют два конструктивных исполнения – с односторонним и двухсторонним штоком. Максимальная скорость поршня – 0,5 м/с; диаметры поршня от 40 до 125 мм; ход поршня зависит от исполнения и составляет 16…400 мм для первого исполнения и 16…100 мм – для второго.
Гидроцилиндры типа ГЦ крепятся с помощью проушин и цапф. Номинальное давление – 10 МПа, расчётная скорость поршня 0,5 м/с, диаметры поршня 50, 80, 100 мм. Ход поршня зависит от диаметров поршня и штока: S =100…500 мм (D = 50мм); S = 160…400 мм (D = 80 мм); S = 125…800 мм (D=100 мм). Давление холостого хода 0,3 МПа, страгивания – не более 0,5 МПа.
При проектировании специальных цилиндров, монтаже и эксплуатации стандартных и специальных особое внимание уделяется уплотнениям поршня и штока. От их состояния зависят надёжность и долговечность работы цилиндра, его статические и динамические характеристики.
При износе уплотнений поршня масло перетекает из камеры с большим давлением в камеру с меньшим. Следствием этого является снижение тянущей и толкающей сил, уменьшение максимальной скорости штока, снижение скорости под нагрузкой, опускание штока с рабочим органом, перемещающихся вертикально.
Износ уплотнений штока приводит к увеличению внешних утечек масла, снижению тянущей силы цилиндра и скорости штока, уменьшению настроенного давления в гидросистеме.
Увеличенная затяжка регулируемых уплотнений штока приводит к резкому возрастанию трения, и, как следствие, к износу уплотнения штока, к неравномерному движению штока, уменьшению тяговой силы цилиндра. Резкий износ уплотнений цилиндра наблюдается в результате действия на шток радиальных сил, при несоосности штока и соединённого с ним рабочего органа, попадания грязи и стружки на шток цилиндра, при загрязнении рабочей жидкости гидросистемы.
НАСОСНЫЕ УСТАНОВКИ
Насосный агрегат – это компоновка насоса с электродвигателем. Насосная установка – компоновка насосных агрегатов с гидробаком, предназначенная для питания гидродвигателей очищенным маслом. Станция гидропривода – компоновка насосной установки (НУ) с гидроаппаратами, управляющими движением выходных звеньев объемных гидродвигателей.
КЛАССИФИКАЦИЯ
Насосные установки и станции гидропривода можно классифицировать по следующим признакам. По типу насосного агрегата – НУ с насосом постоянной производительности (рис. 3.1, а) и с регулируемым насосом. Последние подразделяются на НУ с насосом, регулируемым вручную (рис. 3.1, б) и автоматически регулируемым насосом (рис. 3.1, в). По числу насосов в насосном агрегате: с одним насосом (рис. 3.2, а); с двумя насосами (рис. 3.2, б); с тремя насосами и более (рис.3.2, в). По числу насосных агрегатов - с одним агрегатом (рис. 3.3, а), с двумя и более (рис. 3.3, б)
По расположению насосного агрегата на гидробаке - с горизонтальным (рис. 3.1) и вертикальным (рис. 3.2) расположением.
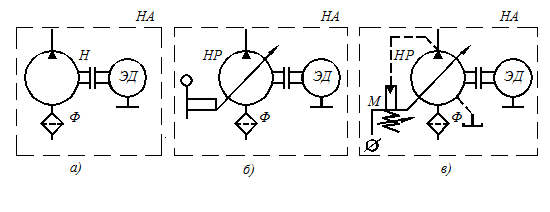 |
Рис. 3.1
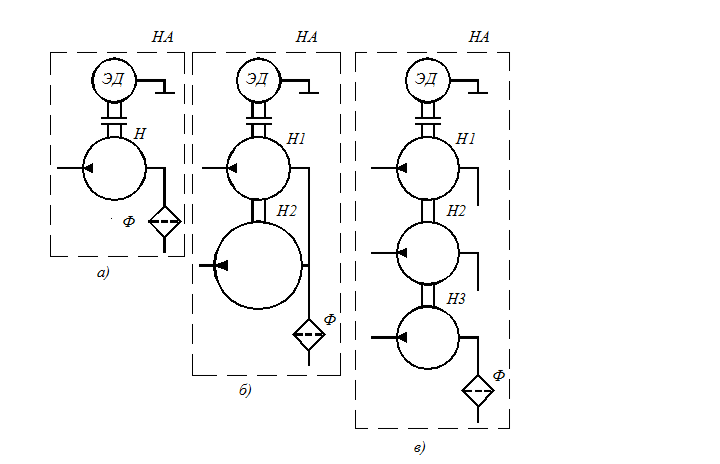
Рис. 3.2
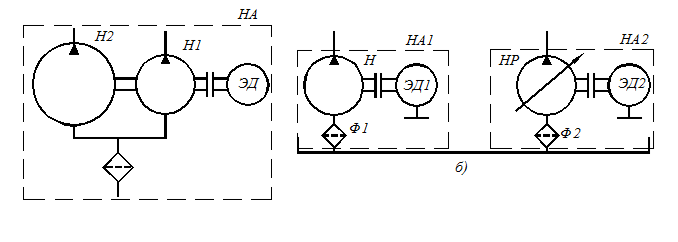
Рис. 3.3
По типу клапана, регулирующего давление в напорной линии: с клапаном давления прямого регулирования типа ПГ54-3 (рис. 3.4, а); с клапаном давления непрямого регулирования типа МКПВ (рис. 3.4, б); с гидропанелью типа ПГ53-2 (рис. 3.5); с гидропанелью 2ПГ53-2 (рис. 3.6).
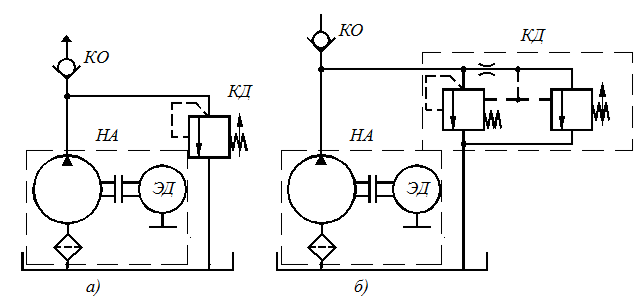
Рис. 3.4
Клапаны давления непрямого регулирования отличаются от клапанов давления прямого регулирования большими давлениями (при одинаковом условном проходе), большими значениями максимального давления на входе, меньшими значениями момента силы настройки, меньшей массой, высоким быстродействием. Достоинством клапанов давления прямого регулирования является простота конструкции и низкая стоимость. Гидропанель ГПР (рис. 3.5) содержит два клапана давления КД1 (прямого регулирования), КД2 (непрямого регулирования) и обратный клапан КО2. Она предназначена для автоматического объединения и разделения потоков двух насосов, когда цикл работы технологического оборудования состоит из замедленных и быстрых перемещений рабочих органов. При ускоренном движении рабочих органов давление в напорной линии понижается, так как при этом гидродвигатели потребляют большой расход масла. Такой объем можно было бы обеспечить, например, одним насосом большой производительности. Однако во время замедленного движения, когда гидродвигатели потребляют мало масла, большая часть потока насоса будет вытесняться в бак через клапан, настроенный на высокое давление. Уменьшить потери мощности можно, если применить два насоса разной производительности, и два клапана давления, настроенные на разные давления.
Давление настройки клапана КД1 меньше, чем клапана КД2, подключенного к насосу Н1 малой производительности. Поэтому во время ускоренного движения (давление в системе меньше настройки КД1) оба насоса подключаются к одной напорной линии 4. (На принципиальных гидро(пневмо)схемах указывают номера гидролиний, начиная с всасывающей линии насоса. При описании работы схемы делаются ссылки только на те линии, которые необходимы для объяснения принципа функционирования гидро(пневмо)системы). Когда давление в системе становится больше настройки КД1, например, при замедленном движении рабочих органов ТО, обратный клапан КО2 закрывается. Поток насоса Н2 отключается от напорной линии 4 и через КД1 направляется в бак.
В разделительную панель 2Г53-2 (рис.3.6) дополнительно установлены клапан давления КД3 и распределитель Р, предназначенные для гидроразгрузки.

Рис. 3.5

Рис. 3.6
По наличию гидроразгрузки насосные установки делят на НУ без гидроразгрузки (рис. 3.7, а), с частичной гидроразгрузкой (рис. 3.7, б) и с полной гидроразгрузкой (рис. 3.7, в) В данном случае под гидроразгрузкой понимается направление потока насоса в бак при низком давлении, когда все гидродвигатели неподвижны. В такие моменты работы ТО давление в гидросистеме и эффективная мощность насосной установки достигают максимального значения. С целью экономии электроэнергии применяется гидроразгрузка. Полной называется гидроразгрузка при минимальном давлении, определяемом сопротивлением сливной линии. Частичной – гидроразгрузка при давлении выше минимального, но ниже максимального. Она применяется тогда, когда снижение давления до минимальной величины может привести к ослаблению усилий работающих гидродвигателей, но не расходующих масло, например, зажимных или фиксирующих.

Рис. 3.7
Клапан КД2 (рис. 3.7, б) настраивается на давление, при котором обеспечивается надежная работа таких гидродвигателей. После включения электромагнита YA распределителя Р открывается клапан КД1 и весь поток масла направляется в бак под давлением настройки клапана КД2. В насосной установке (рис. 3.7, в) насос разгружается при минимальном давлении.
По методу охлаждения масла в гидробаке различают насосные установки с охлаждением поверхностью бака (рис. 3.7), с воздушным теплообменником (рис. 3.8, а), с охлаждением водой или фреоном (рис. 3.8, б). 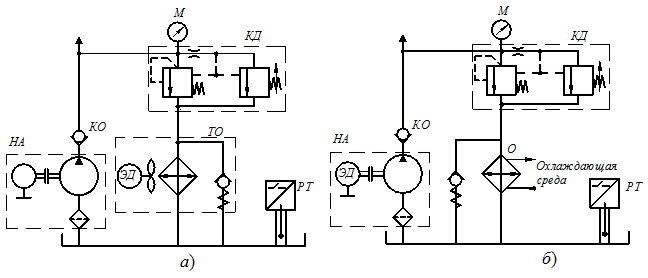
Рис. 3.8
Метод охлаждения поверхностью бака применяется в тех случаях, когда в результате теплового расчета гидросистемы количество тепла, выделяемого в процессе работы, оказывается меньше тепла, рассеиваемого поверхностью бака. В состав теплообменника входят электродвигатель с вентилятором, масляный радиатор с предохранительным клапаном и терморегулятор РТ (рис. 3.8, а). С помощью терморегулятора устанавливается расчетная максимальная температура масла в баке, после достижения которой включается электродвигатель с вентилятором и масло охлаждается. Такой метод охлаждения масла в НУ применяется чаще других. Недостатком его является невозможность снижения температуры масла до требуемых пределов при высокой температуре окружающей среды.
При охлаждении водой в качестве охладителей применяются расположенные в баке водяные радиаторы и змеевики, по которым протекает холодная вода. Терморегулятор РТ подает сигнал в систему управления на включение или отключение подачи воды. Метод достаточно эффективен, особенно в цехах с высокой температурой воздуха, хотя и имеет ряд недостатков. Быстро охлаждают и точно поддерживает заданную температуру фреоновые охладители. Однако они дороже всех, перечисленных ранее охладителей.
По емкости гидробака - с емкостью до 50, 100, 200 литров и т.д. При необходимости указания объема заливаемого масла на принципиальной схеме рисуют стрелку с надписью объема масла в литрах (рис. 3.9). Воздушный фильтр ФВ поддерживает давление воздуха над уровнем масла в баке равным атмосферному и очищает поступающий в бак воздух.
 |
Рис. 3.9

Рис. 3.10
Насосные установки отличаются от станций гидропривода составом гидроаппаратуры. В состав насосной установки, как правило, входят насосный агрегат НА (рис. 3.10), бак, воздушный фильтр ФВ, блок сливного фильтра БСФ и маслоохладитель МО.
Станции гидропривода дополнительно могут оснащаться напорным фильтром Ф1 (рис. 3.11), клапаном давления КД, распределителями Р, пневмогидроаккумулятором ПГА, переключателем манометра ПМ, терморегулятором ТР и датчиком уровня ДУ.
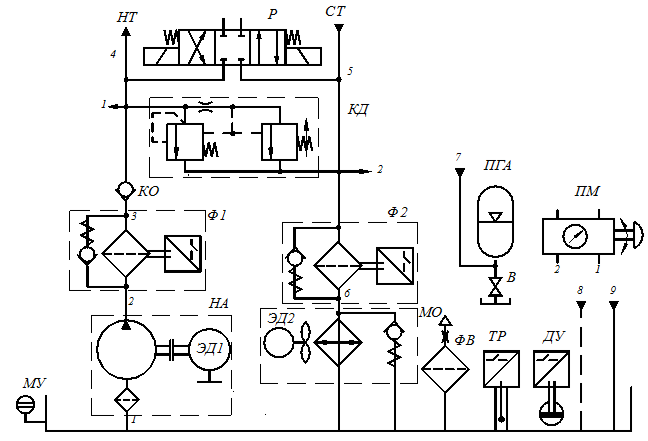
Рис. 3.11
КОНТРОЛЬ ДАВЛЕНИЯ
Давление в напорных и сливных линиях насосных установок может контролироваться манометрами, переключателями с одним манометром, индикаторами и датчиками давления. Применение того или иного вида контрольных приборов зависит от технических требований к гидросистеме, в целом, и к насосной установке, в частности. Так, например, если в технических требованиях предусмотрено техническое диагностирование системы, то применение манометров (показывающих) исключается. В этом случае следует проектировать систему с датчиками, индикаторами или реле давления.
Контроль давления с помощью манометров, установленных в контрольных точках системы, реализуется по схеме рис. 3.12. Манометрами М1 и М3 контролируется засорение фильтров Ф1 и Ф2, а по манометру М2 определяется давление настройки клапана КД. Достоинство этого метода – его простота и незначительные затраты на оборудование, недостаток – неудобство контроля (установка в разных местах и далеко от рабочего места).
 |
Рис. 3.12
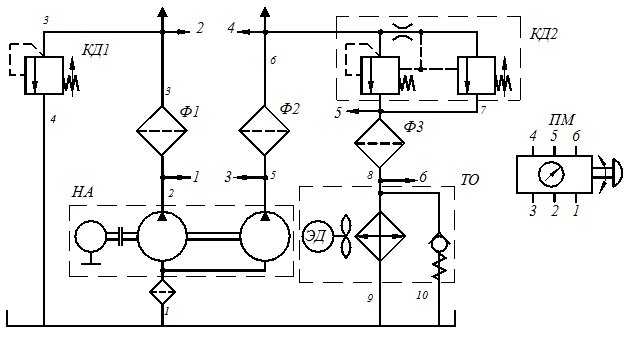
Рис. 3.13
Чаще применяется метод контроля давления с помощью одного или нескольких переключателей с установленными на них манометрами (рис. 3.13). В контрольных точках делают отводы 1, 2, 3, с помощью труб малого диаметра, которые подводят к соответствующим входам переключателя ПМ. Количество манометров сокращается до числа переключателей, но увеличивается количество труб, что усложняет ремонт и уменьшает надежность системы.
В гидросистеме (рис. 3.14, а) давление контролируется с помощью реле давления РД1 (напорная линия) и РД2 (засорение фильтра). Необходимо помнить, что реле давления не дают информацию о фактической величине давления. Они подают лишь один сигнал, когда давление в контрольной точке достигает заданного значения. Поэтому их применяют для получения информации о критической величине давления - максимальной или минимальной.

Рис. 3.14
С помощью датчиков давления (рис. 3.14, б) можно измерять фактическое давление, выводя их показания на вольтметр пульта управления. Таким образом, не сходя с рабочего места, можно получать информацию о давлении в любой точке гидросистемы. Настройку реле и датчиков давления надо периодически контролировать. Для этого их снимают с насосной установки и проверяют на контрольном стенде, либо в узле установки датчика предусматривают резьбовое отверстие для манометра.
Этот метод также не лишен недостатков. Так, например, если датчик спроектирован для контроля давления напорного клапана с ручной регулировкой, то настроить его с помощью пульта одному рабочему будет трудно. В таких ситуациях целесообразна совместная компоновка датчика и манометра.
Дата добавления: 2019-07-15; просмотров: 345; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!