Определение размеров механизма
По заданным в исходных данных геометрическим размерам “челюсти” и расстоянию между осями вращения кривошипа и коромысла построим треугольники, условно изображающие механизм в крайних положениях (рис 2) и выпишем известные величины:
φ3max=16°
β=50°
lBO3=1.0 м
lDO3=0.9 м
lO1O3=1.05 м
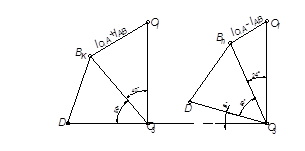
Рис.2
По теореме косинусов определим
lO1A+lAB и lO1A-lAB:


Откуда получаем необходимые значения звеньев механизма:
Далее определим положение центра масс шатуна, используя исходные данные и полученные значения длин звеньев:

Теперь определим масштаб построения механизма и с учетом масштаба длины звеньев механизма:
Механизм в данном масштабе с рассчитанными длинами звеньев вычерчен на листе №1 формата А1.
Построение графика силы сопротивления
Механическая характеристика, т.е. зависимость силы сопротивления от перемещения верхнего ножа аллигаторных ножниц строится по диаграмме усилия реза, представленной на рис.1б:
сначала по заданной координате находится положение разрезаемого металла (точка К) и в масштабе вычерчивается его сечение -b*b.Далее в зависимости от поворота кривошипа определяется перемещение точки К в метрах (SK) и откладывается как дуговая координата. По максимальному перемещению определяется масштаб перемещений точки, который будет равен:
 ,
,
далее проводятся лучи из центра О3 через верхнюю точку середины изображенного сечения металла, через точку, равную 0.25b, а также точку, равную 0.5b.Затем на луче, проведенном через точку 0.25b, от начала координат, полученного пересечением дуговой координаты с первым лучом откладывается произвольно отрезок, равный Ррmax и определяется масштаб силы сопротивления:
|
|
|
 .
.
Беря значения с диаграммы усилий реза на соответствующих лучах в масштабе, достраивается механическая характеристика, изображенная на листе №1 формата А1.Значения перемещения и силы сопротивления приведены в таблице 2.1:
Таблица 2.1
| Перемещение SK , м | Сила сопротивления Fc , Кн |
| 0.0616 | 0 |
| 0.0702 | 666.6 |
| 0.0783 | 1000 |
| 0.0867 | 666.6 |
Построение графиков передаточных функций механизма
Для определения значений передаточных функций механизма воспользуемся программой Diada и в качестве входных параметров используем известные геометрические параметры механизма. Сведем в таблицу 2.2 полученные значения передаточных функций для 12 положений механизма:
Таблица 2.2
| 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | |
| VqK | -0.014 | 0.008 | 0.029 | 0.046 | 0.054 | 0.048 | 0.027 | -0.007 | -0.042 | -0.059 | -0.054 | -0.036 | -0.014 |
| VqS2 | 0.087 | 0.082 | 0.10 | 0.123 | 0.135 | 0.127 | 0.10 | 0.08 | 0.104 | 0.134 | 0.135 | 0.112 | 0.087 |
| U2-1 | 0.22 | 0.24 | 0.20 | 0.11 | 0.01 | -0.09 | -0.19 | -0.24 | -0.23 | -0.15 | 0 | 0.14 | 0.22 |
| U3-1 | -0.03 | 0.02 | 0.07 | 0.11 | 0.13 | 0.12 | 0.07 | -0.02 | -0.1 | -0.15 | -0.13 | -0.09 | -0.03 |
|
|
|
Определим масштабы передаточных функций:

Построение графиков приведенных моментов
Для упрощения определения закона движения реальный механизм заменяют динамической моделью, под которой понимается отдельно взятое звено приведения, условно снабженное переменным моментом инерции IΣпр и вращающееся под действием момента MΣпр. Величину этого момента определяют по формуле:
 ,
,
где Мi,Fj-моменты и силы, приложенные к механизму в различных его точках, а Vq и ωq(или U)-передаточные функции скоростей. Для нашего механизма эта формула будет иметь вид:
 ,
,
здесь можно пренебречь моментами сил тяжести т.к. они не оказывают сколько-нибудь существенного влияния на величину суммарного приведенного момента. В этой формуле мы можем найти величину момента силы сопротивления, который равен произведению FcVqK.Для этого необходимо умножить силу сопротивления на аналог скорости точки К в положениях механизма, которые соответствуют резу металла. Значения момента сопротивления приведены в таблице 2.3
|
|
|
Таблица 2.3
| φ, град | 132 | 136 | 148 | 155 |
| VqK, м | 0.054 | 0.04 | 0.05 | 0.046 |
| Fc, Кн | 0 | 666.6 | 1000 | 666.6 |
| Мс, Кн*м | 0 | 26.53 | 50 | 30.93 |
Масштаб графика момента сопротивления:
Напрямую определить движущий момент, приложенный к кривошипу, мы не можем, так как неизвестны характеристики электродвигателя. Поэтому поступают следующим образом: графически интегрируют график момента сопротивления и находят работу силы сопротивления. Последовательность графического интегрирования подробно приведена в [3] и поэтому в настоящей записке не приводится. Имея график работы момент сопротивления, строим график работы движущего момента и график движущего момента (рис 3) в нулевом приближении, представляющий собой константу на интервале поворота кривошипа от 0 до 2π. Её значение равно: 
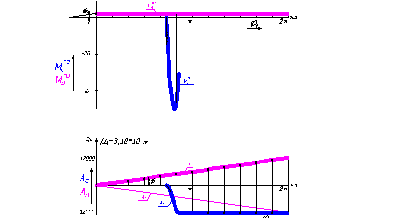
Рис 3
Для получения искомой зависимости суммарного приведенного момента нужно просуммировать значения моментов в соответствующих положениях. Значения суммарного приведенного момента приведены в таблице 2.4 и рассчитаны только для четырех положений, для которых был вычислен момент сопротивления. Для всех же остальных положений величина суммарного приведенного момента равна величине момента движущего.
|
|
|
Таблица 2.4
Дата добавления: 2019-07-15; просмотров: 182; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!