ВЫБОР КОМПЕНСИРУЕМОЙ ПОСТОЯННОЙ
Величина Тμ является "базовой" при расчете СПР, для которых характерно, что динамические свойства системы не зависит от параметров объекта регулирования и определяется только величиной постоянной времени Тμ фильтра, установленного на выходе регулирующей части системы управления. Таким образом , в стандартных системах регулирования величина Тμ является единственным средством воздействия на систему управления.
С одной стороны уменьшение Тμ приводит к увеличению быстродействия и снижению статической и динамической ошибок по скорости при приложении внешних возмущающих воздействий, с другой стороны величина этой постоянной времени должна быть достаточно большой, чтобы обеспечить высокую помехозащищенность системы, ограничение тока якоря на допустимом уровне и устойчивость работы САУ с учетом дискретность тиристорного преобразователя.
Следовательно фильтр с постоянной времени Тμ должен реально присутствовать в САУ электроприводом.
В реальных САУ с подчиненным регулированием параметров величина Тμ лежит в пределах 0,004-0,01 с.
Для нашей системы выберем Тμ = 0,007 с.
Расчет контура регулирования тока якоря
Расчетная структурная схема контура тока

|
Контур регулирования тока якоря является внутренним контуром САУ электроприводом. Он образуется регулятором тока, фильтром с постоянной времени Тμ, тиристорным преобразователем, якорной цепью и обратной связью по току через датчик тока (kдт = 1). В объекте управления имеет место внутренняя обратная связь по ЭДС якоря двигателя. Структурная схема контура тока представлена на рис. 12.
|
|
|
Передаточная функция регулятора тока
При синтезе регулятора внутренняя обратная связь оп ЭДС не учитывается.
Передаточная функция регулятора тока, найденная по условию настройки на модульный оптимум:
 , где
, где
Тi1 = Tэ = 0,07с;


При выборе данной передаточной функции регулятора тока замкнутый контур тока будет описываться передаточной функцией фильтра Баттерворта II порядка:



|

При условии неподвижного якоря двигателя (когда ω = 0, ея = 0). В этом случае реакция контура на единичное ступенчатое задание тока представлена кривой 1 на
рис. 13.
Компенсация влияния ЭДС якоря двигателя
Действие ЭДС якоря приводит к погрешности регулирования тока. Появляется астатизм контура по задающему воздействию. При единичном задании на ток статическая ошибка составит:
 , где
, где



|
Статическая ошибка по току оказывается существенной, поэтому пренебречь влиянием обратной связи по ЭДС нельзя. Для компенсации влияния ЭДС якоря используют принцип комбинированного управления. В систему управления вводится положительная обратная связь по ЭДС. Для удобства технической реализации эта обратная связь подается на вход регулятора тока, а фильтр выносится из контура в цепь задания и обратной связи по току. Структурная схема контура тока с компенсирующей связью по ЭДС представлена на рис. 14.
|
|
|

Передаточная функция звена компенсации ЭДС будет иметь вид:
 , где
, где


Реализация датчика ЭДС
ЭДС якоря двигателя, в отличие от тока якоря и скорости, недоступна для прямого измерения. Датчик косвенного измерения ЭДС якоря использует сигналы датчика тока якоря и датчика напряжения на якоре двигателя. Связь между током якоря, напряжением якоря и ЭДС якоря устанавливает уравнение электрического состояния равновесия в якорной цепи. В операторном виде оно имеет вид:
 , где
, где


|
Выразив ЭДС, получим уравнение датчика. Структурная схема датчика тока приведена ниже. Для возможности практической реализации форсирующего звена и защиты системы от помех в сигналах датчиков в канале тока и напряжения датчика ЭДС добавлено инерционное звено с постоянной времени Тμ. Таким образом реальный датчик ЭДС будет инерционным.
|
|
|
Конструктивный РАСЧЕТ
Рассмотрим реализацию управляющей части контура тока якоря в аналоговой системе автоматического управления электроприводом на базе операционных усилителей.
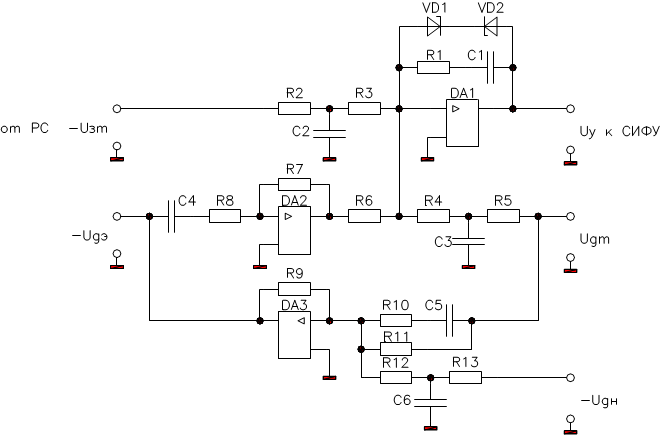
Принципиальная схема регулятора тока и цепи компенсации ЭДС представлена на рис. 16.
Регулятор реализован на усилителе DA1, звено компенсации ЭДС - на усилителе DA2. Усилитель DA3 предназначен для суммирования сигналов в датчике ЭДС.
Для расчета элементов схемы по известным значениям параметров в относительных единицах используем базисные величины:
Iбр = 0,5 мА - базисный ток регулирования принимаем, как рекомендуется в [5].
Uбр = 10 В - базисное напряжение регулирования.

|
Базисное сопротивление системы регулирования:
|


Принимаем величины сопротивлений

Емкость фильтров в цепи задания и обратной связи по току:


Емкость в цепи обратной связи усилителя DA1:


Сопротивления в цепи обратной связи усилителя DA1:


Емкость во входной цепи усилителя DA2


Сопротивление в обратной связи усилителя DA2:


Емкость фильтра на входе DA3:

Параметры элементов на входе форсирующего звена на входе DA3:
|
|
|
 , где
, где






8 РАСЧЕТ КОНТУРА РЕГУЛИРОВАНИЯ СКОРОСТИ
Дата добавления: 2019-07-15; просмотров: 347; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!