Принципиальная электрическая схема силовой части
|
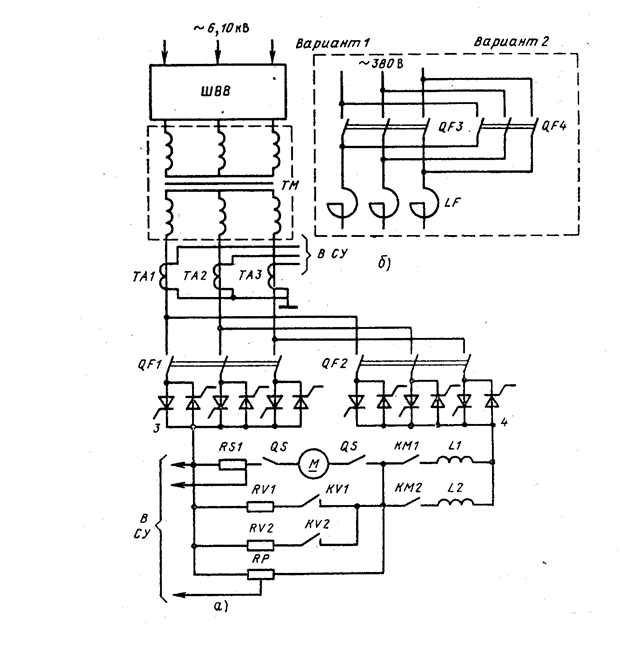
Принципиальная схема выбирается по [4]. Для номинального тока Iном = 800 А выбираем схему, приведенную на рис. 1.3 [4]:

|
На рисунке 5 приведена схема силовой части электропривода с номинальным током 800, 1000 А при напряжении 220, 440 В. Защитные автоматические выключатели QF1, QF2 установлены последовательно с тиристорами. Для неоперативного отключения электродвигателя от тиристорного преобразователя (ТП) используется рубильник QS. Силовой трансформатор ТМ присоединяется к высоковольтной сети 6 или 10 кВ через шкаф высоковольтного ввода (ШВВ). При напряжении питания 380 В ТП подключается к сети через анодные реакторы LF и автоматические выключатели QF3, QF4.
5 МАТЕМАТИЧЕСКАЯ МОДЕЛЬ СИЛОВОЙ ЧАСТИ ЭЛЕКТРОПРИВОДА
РАСЧЕТ ЭКВИВАЛЕНТНЫХ ПАРАМЕТРОВ СИСТЕМЫ

|
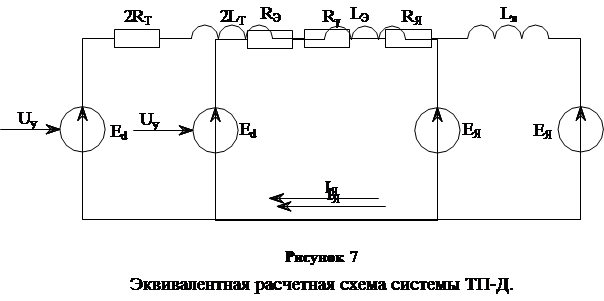
Электрическую часть системы ТП-Д можно представить в виде следующей полной расчетной схемы:
|
От полной схемы можно перейти к эквивалентной схеме, где все индуктивности объединяются в одну эквивалентную индуктивность LЭ, а все активные сопротивления в одно эквивалентное сопротивление RЭ.
Определим эквивалентные параметры ТП-Д.
Фиктивное активное сопротивление преобразователя обусловленное коммутацией тиристоров:

Эквивалентное сопротивление якорной цепи:


Эквивалентная индуктивность якорной цепи:


Электромагнитная постоянная времени якорной цепи:
|
|
|

|
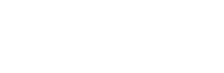
Коэффициент зователя:
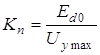 , где
, где
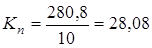
Uy max = 10 В - максимальное напряжение управления СИФУ.
Переход к системе относительных единиц
Для дальнейших расчетов все параметры и переменные системы представим в относительных единицах. Общая формула перехода к относительным единицам имеет вид:
 , где
, где
y - значение величины в системе относительных единиц;
Y - значение физической величины в исходной системе единиц;
Yб - базисное значение, выраженное в той же системе единиц, что и величина Y.
Принимаем базисные величины:
Базисное напряжение для силовой части:

Базисный ток для силовой части:

Базисная скорость:

Базисный момент:

Базисное напряжение для системы регулирования (принято):
Базисный ток для системы регулирования (принято):
Базисное сопротивление для системы регулирования:


Далее используем следующие переменные в относительных единицах (о.е.):
Напряжение управления преобразователя в о.е.:

ЭДС преобразователя в о.е.:

ЭДС якоря двигателя в о.е.:

Ток якоря в о.е.:

Момент статического сопротивления в о.е.:

Скорость двигателя в о.е.:

Определим параметры объекта управления в о.е.
Эквивалентное сопротивление якорной цепи в о.е.:
|
|
|


Коэффициент преобразователя в о.е.:
Механическая постоянная времени:
Электромеханическая постоянная времени:
 , где
, где
φ - магнитный поток в о.е. (при однозонном регулировании скорости φ = 1).

Дата добавления: 2019-07-15; просмотров: 183; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!