Тема: Расчет маневра расхождения с одной целью
ФЕДЕРАЛЬНОЕ ГОСУДАРСТВЕННОЕ БЮДЖЕТНОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ ВЫСШЕГО ОБРАЗОВАНИЯ
«КЕРЧЕНСКИЙ ГОСУДАРСТВЕННЫЙ МОРСКОЙ ТЕХНОЛОГИЧЕСКИЙ УНИВЕРСИТЕТ»
Куценко Д.Г.
Предотвращение столкновения судов
Практикум
Для курсантов специальности 26.05.05 «Судовождение»
очной и заочной форм обучения
Керчь, 2016
 |
Содержание
Введение 4
Раздел 1. Радиолокационное наблюдение и прокладка 6
Тема 1. Оценка ситуации сближения судов. 6
Тема 2. Правила плавания при любых условиях видимости. 7
Тема 3. Правила плавания при нормальной видимости 9
Тема 4. Правила плавания при ограниченной видимости 11
Тема 5. Истинная и относительная радиолокационная
прокладка. 13
Тема 6. Виды ЛОДов. Критерии опасности целей 19
Тема 7. Закономерности относительного движения 21
Тема 8. Расчет маневра расхождения с одной целью 28
Тема 9. Расчет маневра расхождения с группой судов. 30
Тема 10. Частные задачи расхождения 24
Тема 11. Требования к использованию РЛС. 25
Раздел 2. Использование средств автоматической
|
|
|
радиолокационной прокладки 26
Тема 12. Возможности, назначение и функции САРП. 26
Тема 13. Реализация функций САРП в различных РЛС 27
Тема 14. Реализация САРП в РЛС “Океан-с” и Бридж-мастер. 28
Тема 15 Ограничения РЛС САРП 30
Тема 16.Навигационное использование САРП. 31
Список использованной (рекомендуемой) литературы 33
Введение
Цель изучения дисциплины «Предотвращение столкновений судов» - получить знания и умения, необходимые для исполнения обязанностей вахтенного помощника капитана в части выяснения ситуации сближения судов в море и предупреждения их столкновения.
Достижение этой цели осуществляется путем глубокого усвоения МППСС-72, методов выяснения ситуации сближения судов, вычисления параметров сближения, признаков опасного и безопасного сближения, выполнения упражнений на электронных тренажерах. Рабочая программа составлена на основании ФГОС ВО, компетенций ПДМНВ 78 с поправками.
Темы практических занятий.
Раздел 1 Радиолокационное наблюдение и прокладка
| Наименование темы
| Количество часов по формам обучения | ||||||
| Очная (8 сем) | Заочная (10 сем) | ||||||
| Тема 1.Оценка ситуации сближения судов. | 2 | 1 | |||||
| Тема 2. Правила плавания при любых условиях видимости | 4 |
| |||||
| Тема 3. Правила плавания при нормальной видимости | 4 | 1 | |||||
| Тема 4. Правила плавания при ограниченной видимости | 2 |
| |||||
| Тема 5.Истинная и относительная радиолокационная прокладка. | 4 |
| |||||
| Тема 6. Виды ЛОДов. Критерии опасности целей | 6 | 1 | |||||
| Тема 7. . Закономерности относительного движения. | 2 | ||||||
| Тема 8. Расчет маневра расхождения с одной целью | 2 | 1 | |||||
| Тема 9. Расчет маневра расхождения с группой судов. | 4 | ||||||
| Тема 10. Частные задачи расхождения | 4 | ||||||
| Тема 11 Требования к использованию РЛС | 2 | ||||||
| Итого | 36 | 4 | |||||
Раздел 2 Использование средств автоматической радиолокационной прокладки
| Наименование темы | Количество часов по формам обучения | |||||
| Очная (10 сем) | Заочная (12 сем) | |||||
| Тема 12. Возможности, назначение и функции САРП. Основные трудности ручной обработки РЛИ. Возможности автоматизации на современном этапе. Функции САРП. | 4 | 2 | ||||
| Тема 13. Реализация функций САРП в различных РЛС | 2 | 1
| ||||
| Тема 14. Реализация САРП в РЛС “Океан-с” и Бридж-мастер. | 6 | 1 | ||||
| Тема 15. Ограничения РЛС САРП. | 6 | 1 | ||||
| Тема 16.Навигационное использование САРП. | 6 | 1 | ||||
| Итого | 24 | 4 | ||||
Практическое занятие №1
Продолжительность занятия: 2 часа.
Тема: Оценка ситуации сближения судов.
В зависимости от полноты информации, получаемой судоводителем, ситуации сближения судов можно разделить на три категории: сближение при ясной видимости днем с глазомерной оценкой ситуации без использования информации от РЛС, сближение при ясной видимости ночью с глазомерной оценкой ситуации без использования информации от РЛС; сближение при ограниченной видимости с использованием радиолокационной информации и без нее. На оценку ситуации сближения влияет соблюдение требований правил 6 и 7 МППСС.
Курсанты дневной и заочной формы обучения выполняют анализ ситуации на основе данных тренажера РЛС. В каждом случае выполняется схематичное изображение ситуации сближения и описываются положения правил МППСС, на основе которых выполняется анализ ситуации.
 |  | ||
Пример:
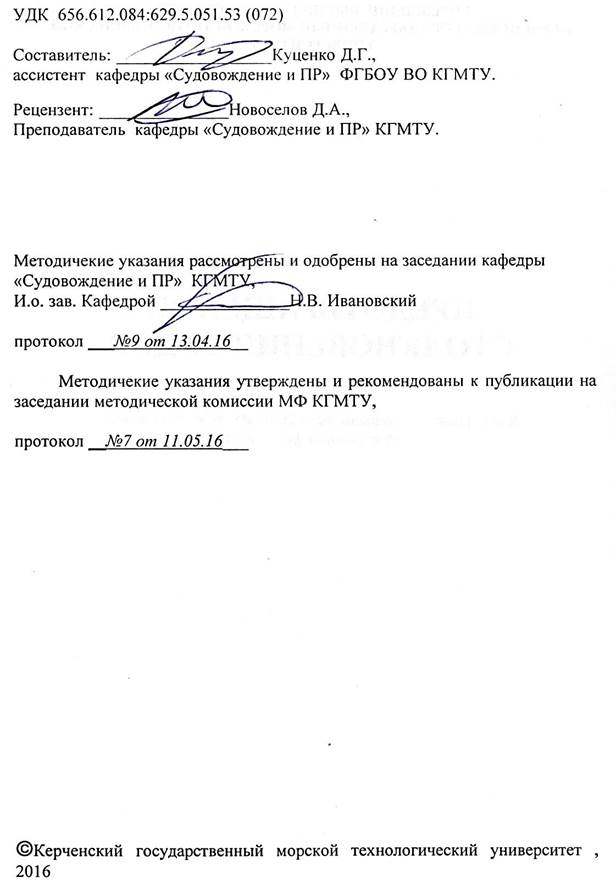
Рисунок 1 Схема расположение целей относительно нашего судна
|
|
|
Анализ:
Цель А является опасной, поскольку ЛОД данной цели проходит в окружности Дзад, согласно Правилу №.. Данная цель должна…
Цель В догоняет нас…в соответствии с правилом № она должна…
Согласно порядковому номеру студента в журнале выбирается задача на расхождение, ситуация на экране симулятора тренажера и используется для анализа.
Вопросы для самоконтроля:
1. Расскажите суть правила №6 МППСС
2. Изложите суть правила 7 МППСС. Укажите примеры применения данного правила.
3. Что определяет Дзад. Суть этого параметра?
4. Существуют безопасные цели?
5. Можно ли считать интенсивное изменение пеленга и дистанции достаточным условием безопасного расхождения?
Рекомендуемая литература [3],[4],[17],[18].
Практическое занятие №2
Продолжительность занятия: 4 часа.
Тема: Правила плавания при любых условиях видимости.
В части В МППСС излагаются наиболее важные из правил, касающихся плавания и маневрирования судов. Они применяются как при хорошей, так и при ограниченной видимости.
Раздел I отображает организацию работы судоводителя на вахте по схеме « наблюдай – анализируй ситуацию – действуй». Поэтому он и открывается правилом, определяющим основную обязанность судоводителя на ходовом мостике судна, – наблюдать за обстановкой на море.
Задача курсантов сводиться к приобретению навыков грамотного использования радиолокационного оборудования и настройки РЛС в зависимости от условий окружающей обстановки. Поскольку данная работа выполняется на тренажере, курсант показывает соответствующие навыки непосредственно на практическом занятии и не требует письменного отчета.
Курсант должен научиться:
1. Включить тренажер.
2. Выбрать оптимальную шкалу дальности
3. Выбрать диапазон волн и длину импульса
4. Настроить изображение на экране путем подавления помех со стороны осадков и высоты волнения моря соответствующими регуляторами
5. Брать цели на автосопровождение и получать первичную информацию по сближению с целями.
Пример расположения органов управления и информации на экране радара представлен ниже на рисунке 2:
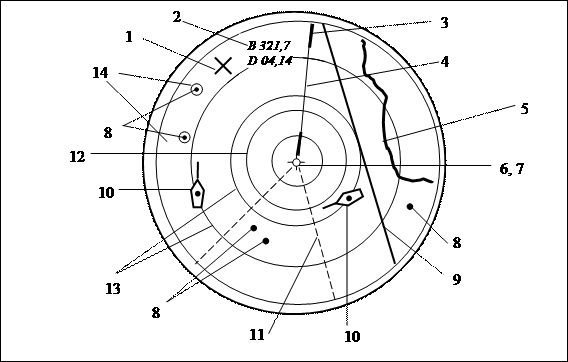
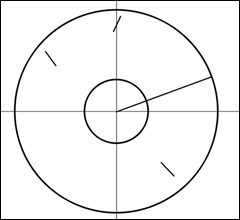
Рисунок 2 Экран САРП
С помощью радиально-круговой развертки создается радиолокационное изображение круговой обстановки (первичная радиолокационная информация):
4 – метка курса;
5 – протяженные цели;
8 – точечные цели;
13 – неподвижные визиры дальности.
С помощью координатных разверток на экране ЭЛТ отображается следующая информация (вторичная радиолокационная информация):
1 – символ подвижного координатного маркера в виде знака умножения;
2 – цифровой формуляр маркера с данными о пеленге В и дальности D;
3 – машинная метка курса в виде короткого вектора, выступающего за пределы экрана. Она высвечивается во всех режимах работы и является указателем курса судна по круговой шкале экрана;
6 - символ начала развертки (положение своего судна) в виде кольца;
7 – символ начала отсчета координат в виде перекрестия;
9 – вектор перемещения цели, длина которого соответствует времени экстраполяции, установленному оператором;
10 – символы сопровождаемых целей для подвижных объектов в виде «корабликов»;
11 – вектор перемещения цели, длина которого соответствует времени экстраполяции, установленному оператором;
12 – охранное кольцо;
14 – символы сопровождаемых целей в виде кружков для неподвижных объектов;
Вопросы для самоконтроля:
1. Что такое первичная радиолокационная информация?
2. Каким образом убираются помехи с экрана радара?
3. Каким образом влияет переключение с 3см диапазона на 10см диапазон на изображение навигационной обстановки.
4. Зачем регуляторы Gain? Rain? Sea? Что меняется при их настройке?
5. Что происходит с изображением при изменении длины импульса?
Рекомендуемая литература [3],[4],[17],[18].
Практическое занятие №3
Продолжительность занятия: 4 часа.
Тема: Правила плавания при любых условиях видимости.
Правила, определяющие условия плавания при нормальной видимости изложены во втором разделе конвенции МППСС. Данные правила определяют приоритеты судов по отношению к друг другу, а также указывают каким образом суда должны маневрировать в условиях визуального наблюдения друг друга
Курсанты дневной и заочной формы обучения выполняют анализ ситуации на основе данных тренажера РЛС. В каждом случае выполняется схематичное изображение ситуации сближения и описываются положения правил МППСС, на основе которых выполняется анализ ситуации. Курсанты должны выработать решение о изменении курса и(или) скорости согласно правил МППСС раздела 2 – плавание в условиях прямой видимости.
Пример:
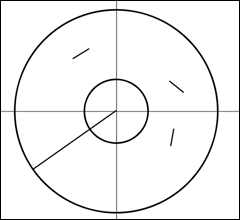
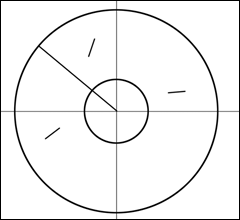
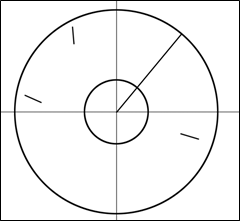
Рисунок 3 Схемы расположение целей относительно нашего судна
Анализ:
Цель А является опасной, поскольку ЛОД данной цели проходит в окружности Дзад, согласно Правилу №.. Данная цель должна…
Цель В догоняет нас…согласно правилу № она должна…
Мы должны сохранять/поменять курс и(или) скорость согласно требований правила № … МППСС….
Согласно порядковому номеру студента в журнале выбирается задача на расхождение, ситуация на экране симулятора тренажера и используется для анализа.
Вопросы для самоконтроля:
1. Расскажите суть правила № 12 МППСС
2. Изложите суть правила № 13 МППСС. Укажите примеры применения данного правила.
3. Расскажите суть правила № 14 МППСС
4. Расскажите суть правила № 15 МППСС
5. Что необходимо предпринять в случае ситуации пересечения курсов?
6. Какие действия должно предпринимать судно, которому уступают дорогу?
7. Разрешается ли выполнять маневр судна влево? Какие правила МППСС отвечают на этот вопрос?
8. Является ли наступление темного времени суток окончанием действия правил плавания при нормальной видимости?
Рекомендуемая литература [3],[4],[17],[18].
Практическое занятие №4
Продолжительность занятия: 2 часа.
Тема: Правила плавания при ограниченной видимости.
Термин «ограниченная видимость» означает любые условия, при которых видимость ограничена из-за тумана, мглы, снегопада, сильного ливня, песчаной бури или по каким-либо подобным причинам (например, береговой дым). В морской практике, исходя из дальности видимости бортовых огней судов длиной 50 м и более, видимость считается ограниченной при уменьшении ее до 3-х миль.
Курсанты дневной и заочной формы обучения выполняют анализ ситуации на основе данных тренажера РЛС. В каждом случае выполняется схематичное изображение ситуации сближения и описываются положения правил МППСС, на основе которых выполняется анализ ситуации. Курсанты должны выработать решение о изменении курса и(или) скорости согласно правила 19 МППСС– плавание в условиях ограниченной видимости.
 |
Пример:
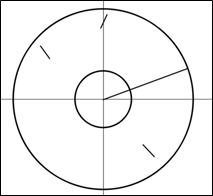
Рисунок 4 Схема расположение целей относительно нашего судна
Анализ:
Цель А является опасной, поскольку ЛОД данной цели проходит в окружности Дзад, согласно Правилу №.. Данная цель должна…
Цель В догоняет нас…согласно правилу № она должна…
Мы должны сохранять/поменять курс и(или) скорость согласно требований правила № 19 МППСС….
Согласно порядковому номеру студента в журнале выбирается задача на расхождение, ситуация на экране симулятора тренажера и используется для анализа.
Вопросы для самоконтроля:
1. Расскажите суть правила № 19 МППСС
2. Что необходимо предпринять в случае ситуации пересечения курсов в условиях ограниченной видимости?
3. Какие действия должно предпринимать судно, которому уступают дорогу в условиях ограниченной видимости?
4. Разрешается ли выполнять маневр судна влево в условиях ограниченной видимости?
5. Разрешается ли маневр в сторону цели, идущей позади траверза?
Рекомендуемая литература [3],[4],[17],[18].
Практическое занятие №5
Продолжительность занятия: 2 часа.
Тема: Истинная и относительная радио прокладка.
Истинная прокладка может быть выполнена непосредственно на крупномасштабной путевой навигационной карте или листе бумаги.
Относительная прокладкаполучила широкое распространение, так как этим способом быстро и легко решаются главные вопросы: на каком кратчайшем расстоянии разойдутся суда и через какое время. При относительной прокладке определяют обстоятельства встречи и элементы движения цели в подвижной системе координат, начало которой принимают в месте нахождения судна-наблюдателя. Это соответствует действительной картине, которую наблюдает судоводитель на экране индикатора относительного движения.
Курсанты дневной и заочной формы обучения выполняют истинную и относительную прокладку на основе пеленгов и дистанций, полученных на тренажере РЛС.
Пример
Истинная прокладка
Обнаружив на экране индикатора эхо-сигнал другого судна, определяют его пеленг П1 и расстояние D1, пускают секундомер, замечают судовое время Т1, курс своего судна Кн и отсчет лага ОЛ1. По пеленгу и расстоянию наносят местоположение эхо-сигнала А1 относительно своего местоположения, предварительно выбрав желаемый масштаб (Рисунок. 5).
Через определенный промежуток времени (для расчетов удобен интервал в 3 или 6 мин) наблюдения повторяют (П2, D2, Т2, ОЛ2) и наносят местоположения своего судна 02 и наблюдаемого судна А2. Проведя через точки А2, и А2, прямую линию, получим линию истинного перемещения цели Кц.
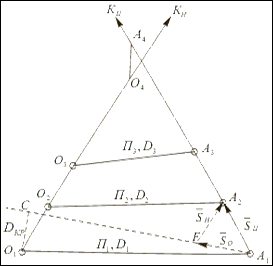
Рисунок 5 Истинная прокладка
По расстоянию между точками А 1и А2 и по времени Т1 и Т2 можно определить скорость цели Vц и рассчитать, когда и на каком расстоянии она пересечет линию курса нашего судна Тпер и Dпер.
Для определения расстояния кратчайшего сближения Dкр и времени до него tкр из точки А2откладывают в сторону, противоположную своему курсу, плавание судна за время между первым и вторым наблюдениями А2F=O1O2. Отрезок O1С, проведенный перпендикулярно к линии, проходящей через точки A1, и F, будет расстоянием кратчайшего сближения. Местоположение судов в момент кратчайшего сближения (точки O1 и A4) можно найти параллельным перемещением отрезка O1С в положение O4A4. Время сближения на кратчайшее расстояние
Для определения обстоятельств встречи и элементов движения другого судна достаточно двух наблюдений. Однако, чтобы исключить промахи в наблюдениях и убедиться в неизменности элементов движения другого судна в период наблюдений, рекомендуется увеличивать число наблюдений. Нахождение трех последовательно нанесенных через одинаковый интервал времени местоположений цели (A1, А2, А3) на одной прямой и равенство расстояний А1А2=А2А3 свидетельствуют как об отсутствии промахов в наблюдениях, так и о неизменности элементов движения цели в период от T1 до Т3.
Относительная прокладка
Из точки О, принимаемой за место своего судна, прокладывают наблюденные пеленги П1 и П2 и по ним расстояния D1 и D2 (Рисунок. 6), Через полученные точки А1, и А2 проводят ЛОД. Длина перпендикуляра ОС, опущенного из точки О на линию относительного движения, представляет собой в выбранном масштабе дистанцию кратчайшего сближения Dкр. Время сближения на кратчайшее расстояние
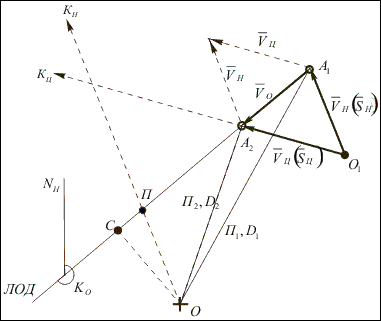
Рисунок. 6 относительная прокладка
При относительной прокладке также быстро определяется и расстояние, на котором цель пересечет курс нашего судна. Для этого достаточно измерить расстояние ОП. (Если ЛОД проходит у нас по носу, определяют точку пересечения целью нашего курса, а если ЛОД проходит у нас по корме — точку пересечения нашим судном курса цели, для чего из центра планшета проводят линию, параллельную  до пересечения с ЛОД). Время пересечения Тпер определится путем прибавления к показаниям судовых часов на момент нахождения местоположения эхо-сигнала в точке А2 промежутка времени tпер:
до пересечения с ЛОД). Время пересечения Тпер определится путем прибавления к показаниям судовых часов на момент нахождения местоположения эхо-сигнала в точке А2 промежутка времени tпер:
Необходимо напомнить, что в первую очередь судоводитель должен определить основные обстоятельства встречи, т. е. Dкр и tкр, а затем уже определять элементы движения цели.
Истинное перемещение цели является суммой двух перемещений - относительного  и судна-наблюдателя
и судна-наблюдателя  или
или 
Учитывая коммутативность суммы векторов  , можно находить
, можно находить  двумя способами.
двумя способами.
Построение векторного треугольника (см. Рисунок 6), показанное сплошными линиями, называется прямым. При нем начала векторов скоростей (линий путей), проложенных в сторону движения судов, находятся в одной точке.
Вопросы для самоконтроля:
1. Что такое истинная прокладка? Каковы ее достоинства и недостатки?
2. Что такое относительная прокладка? Каковы ее достоинства и недостатки?
3. Что такое векторный треугольник скоростей?
4. Когда выполняется обратное построение векторного треугольника скоростей?
5. Какие параметры сближения необходимо определить при построении истинной и относительной прокладки?
6. Как интенсивно должны быть сняты пеленг и дистанция на судно?
Рекомендуемая литература [2],[3],[7],[8].
Практическое занятие №6
Продолжительность занятия: 2 часа.
Тема: Закономерности относительного движения.
Обработка РЛ-информации сводится к решению векторного треугольника скоростей (рисунок 7). Основным элементом векторного треугольника скоростей является вектор относительной скорости перемещения цели (V0), направление и величина которого обусловлены векторами скоростей нашего судна и судна-цели. Vот. = Vц – Vн В свою очередь вектор относительной скорости определяет направление ЛОД.
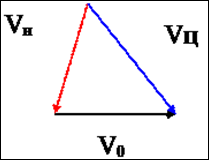
Рисунок 7 Векторный треугольник скоростей
В геометрическом плане безопасность расхождения с целью достигается таким разворотом ЛОД за счет изменения вектора относительной скорости, в результате которого Дкр. станет не менее заданной величины, т.е. Дзад. = Дкр. Поскольку вектор скорости цели не зависит от нас, то изменение вектора относительной скорости может быть достигнуто только за счет изменения вектора скорости нашего судна (рисунок 8), т.е. маневром скорости, курсом или курсом и скоростью одновременно.
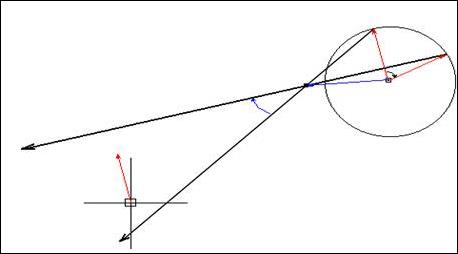
Рисунок 8 Изменение вектора собственной скорости.
Задачей курсантов дневного и зочного форм обучения является выполнение построения ЛОД и ОЛОД цели при снятии параметров движения целей на тренажере РЛС.
Пример Дано: Кн=025° Vн=10 узл Дз=2 мили tуп=6'
|
Время | ||
| ИП | Д | |
| 00.00 | 326.0 | 8.5 |
| 00.03 | 326.7 | 7.5 |
| 00.06 | 327.5 | 6.6 |
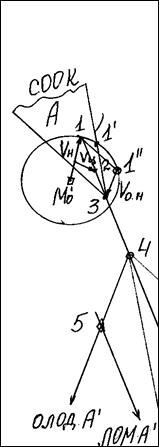
Построить ОЛОД цели при изменении Кнн на 85 градусов (рисунок 9).
 Данное построение выполняется на маневренном планшете:
Данное построение выполняется на маневренном планшете:
· В центре планшета наносим вектор нашей скорости
· Через тт.1,2,3 нанесенные по пеленгам и дистанциям условия задачи проводим ЛОД цели.
· Переносим вектор собственной скорости в точку 1 и наносим окружность радиусом длины вектора собственной скорости в начале данного вектора Мо’.
· Точку Мо’ соединяем с т.1 и получаем новый вектор нашей скорости (Vнн). Если мы ляжем на Кнн, то эхо-сигнал цели пойдет по ОЛОД, который будет параллелен отрезку 1”-3.
Рисунок 9 Построение траектории движения цели после маневрирования собственного судна.
Вопросы для самоконтроля:
1. Каковы закономерности относительного движения?
2. Как измениться направление ЛОДа цели с правого борта , при повороте вправо?
3. Каким образом изменяться ЛОДы целей при уменьшении хода судна?
4. Что произойдет с ЛОДом цели-саттелита , при повороте вправо?
5. Что такое векторный треугольник скоростей?
Рекомендуемая литература [2],[3],[7],[8].
Практическое занятие №6
Продолжительность занятия: 4 часа.
Тема: Расчет маневра расхождения с одной целью
При наличии угрозы чрезмерного сближения, необходимо так изменить курс или скорость своего корабля, чтобы ЛОД цели прошла от центра планшета на безопасном расстоянии. Для расчета маневра на планшете производят соответствующие построения, целью которых является определение параметров маневра безопасного расхождения с одной целью.
Задачей курсантов является решение задач расхождения двумя способами:
· Использование данных условий задач, приведенных в приложении 1. Вариант соответствует порядковому номеру курсанта в группе.
· Снятие параметров движения цели с тренажера.
Данные задачи выполняются на маневренном планшете в течении 12 минут. В противном случае решение задачи не принимается.
Пример:
1. В центре маневренного планшета, (т. Мо), строим вектор нашей скорости Vн.(Рисунок.8.)
2. С обнаружением цели по П и Д наносим относительное место цели т.1. При т.1 строим Vн так, чтобы конец вектора совпадал с т.1, а начало вектора обозначаем т.Мо’. Проводим окружность радиусом равным Vн с центром в т.Мо’. Vн делим пополам.
3. Через промежутки времени равные 3 мин. по ПП и ДД наносим относительные места цели т.2 и т.3.
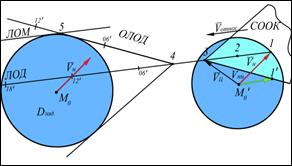
Рисунок 10 Расхождение с одиночной целью
1. Через тт.1,2,3 проводим ЛОД цели. Определяем:
· критерии опасности цели (Дкр,Ткр).
· условия встречи с целью (Дпер.Тпер).
· параметры движения цели (Кц, Vц).
2. По величине Ткр. определяем Туп.и на ЛОД наносим УТ (т.4).
3. Из т.4 проводим касательные к окружности Дзад, переносим их в т.3 и строим СООК. Линии СО пересекут окружность нашей скорости в т.1’.
4. Точку Мо’ соединяем с т.1 и получаем новый вектор нашей скорости (Vнн). Если мы ляжем на Кнн, то эхо-сигнал цели пойдет по ОЛОД на Д равной Дзад.
5. Если линия пересекает вектор нашей скорости Vн, то возможен маневр расхождения изменением скорости. Если мы уменьшим нашу скорость на величину отсеченного отрезка, то тем самым обеспечим расхождение с целью на Дзад.
6. Рассчитаем Трас., для этого ЛОД переносим параллельно до касания с окружностью Дзад. Проводим линию до пересечения с ОЛОД. Линию называем ЛОМ, а точку пересечения обозначаем т.5 (точка окончания маневра). С приходом эхо-сигнала цели в т.5 мы можем ложиться на прежний курс. Трас рассчитывается вектором новой относительной скорости Vнот (т.1’- т.3) по ОЛОД от т.4 до т.5.
7. Дотх рассчитывается - по нашему новому курсу Кнн вектором нашей скорости Vнн откладываем Трас. Из полученной точки проводим линию, параллельную нашему старому курсуКн к средней части планшета. Из центра планшета опускаем перпендикуляр на линию параллельную Кн. Длина перпендикуляра и будет Дотх.
Вопросы для самоконтроля:
1. Какие параметры нужны для построения вектора нашей скорости?
2. Точки 1,2,3 отмечаются по пеленгам дистанциям. Как часто нужно снимать пеленга и дистанции?
3. Что такое ЛОД?
4. Какая функция СООК? Дайте определение СООК.
5. Каким образом наноситься вектор нового курса при повороте вправо?
6. Где будет располагаться точка 1’ при уменьшении скорости ?
7. Что такое дистанция отхода?
Рекомендуемая литература [2],[3],[7], [8],[13],[15],[22].
Практическое занятие №7
Продолжительность занятия: 4 часа.
Дата добавления: 2019-03-09; просмотров: 1724; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!