Режим координированного разворота.
Министерство образования и науки Российской Федерации
Федеральное агентство по образованию
Государственное образовательное учреждение высшего профессионального образования
Тульский государственный университет
Институт высокоточных систем им. В.П. Грязева
Факультет «Систем автоматического управления»
Кафедра "Приборы управления"
СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ
ЛАБОРАТОРНАЯ РАБОТА
ИЗУЧЕНИЕ И ИССЛЕДОВАНИЕ АВТОПИЛОТА АП-5-2М.
для студентов очного бучения
Направление подготовки: 140600 ”Электротехника,
электромеханика и электротехнологии”
Специальность: 140609 " Электрооборудование
летательных аппаратов "
Тула 2009 г.
Общие требования и методические указания.
При выполнении лабораторной работы необходимо:
- усвоить цель и задачи работы,
- усвоить необходимые теоретические сведения по работе,
- ответить на контрольные вопросы,
- ознакомиться с порядком выполнения работы.
Выполнять лабораторные работы необходимо с соблюдением техники безопасности.
После выполнения лабораторной работы оформить отчет в соответствии с требованиями, предъявляемыми к данной работе.
Защита лабораторной работы проводится в форме собеседования с преподавателем по теме лабораторной работы.
Правила техники безопасности при выполнении лабораторной работы.
|
|
|
1. Допускаются к работе только лица, прошедшие инструктаж по технике безопасности.
2. Выполнять только те работы, которые регламентированы данной лабораторной работой, производить работы, не связанные с выполнением данной работы, запрещается.
3. Не допускается загромождение рабочего стола посторонними предметами и неиспользуемыми приборами.
4. Не допускать нахождения на рабочем месте посторонних лиц, не связанных прямым отношением к проводимой работе.
5. Запрещается ходить по лаборатории без дела, трогать, включать или выключать выключатели приборов, пусковые кнопки оборудования, не используемого в лабораторных работах.
ЦЕЛЬ И ЗАДАЧИ РАБОТЫ:
Ознакомиться с назначением, принципом действия и основными элементами автопилота АП-5-2М; исследовать законы управления автопилота
АП-5-2М.
ОСНОВЫ ТЕОРИИ.
Автопилот АП-5-2М предназначен для: 1) стабилизации углов крена, рыскания тангажа;
2) выполнения координированного разворота, набора и снижения высоты, восходящих, плоских и нисходящих спиралей;
3) стабилизации прицела при бомбометании;
|
|
|
4) бустерного управления.
Автопилот (АП) имеет три канала, которые могут включаться раздельно.
Законы управления автопилота АП-5-2М.
Автопилот АП-5-2М является автопилотом с жесткой обратной связью. В режиме стабилизации угловых координат самолета законы управления автопилота имеют следующий вид: 


 (1). где
(1). где  угол отклонения элеронов ;
угол отклонения элеронов ;  угол отклонения руля поворота ;
угол отклонения руля поворота ;  угол отклонения руля высоты ;
угол отклонения руля высоты ;  передаточные коэффициенты автопилота .Нижний индекс при коэффициентах указывает канал, в который подается сигнал, а верхний индекс указывает, откуда подается этот сигнал;
передаточные коэффициенты автопилота .Нижний индекс при коэффициентах указывает канал, в который подается сигнал, а верхний индекс указывает, откуда подается этот сигнал;  - заданные значения углов крена, курса тангажа соответственно;
- заданные значения углов крена, курса тангажа соответственно;
|
|
|
 скорость разворота самолета по курсу,
скорость разворота самолета по курсу,  - сигнал перекрестной связи с курса на элероны; нужен для более быстрого возвращения самолета на заданный курс. При отклонении самолета от заданного курса на элероны подается сигнал для крена самолета в сторону заданного курса. Следовательно, возврат самолета на заданный курс происходит в режиме координированного разворота, а координированный разворот значительно быстрее плоского;
- сигнал перекрестной связи с курса на элероны; нужен для более быстрого возвращения самолета на заданный курс. При отклонении самолета от заданного курса на элероны подается сигнал для крена самолета в сторону заданного курса. Следовательно, возврат самолета на заданный курс происходит в режиме координированного разворота, а координированный разворот значительно быстрее плоского;
 - сигнал перекрестной связи с крена на курс. При отсутствии этого сигнала всякий разворот по крену приводил бы к развороту по курсу вследствие появления скольжения, а с ним и аэродинамического момента поперечной устойчивости. Под действием этого сигнала руль поворота отклоняется в сторону, противоположную крену;
- сигнал перекрестной связи с крена на курс. При отсутствии этого сигнала всякий разворот по крену приводил бы к развороту по курсу вследствие появления скольжения, а с ним и аэродинамического момента поперечной устойчивости. Под действием этого сигнала руль поворота отклоняется в сторону, противоположную крену;
 - сигнал перекрестной связи с крена на таигаж. Он парирует стремление самолета к снижению высоты из-за уменьшения вертикальной составляющей подъемной силы.
- сигнал перекрестной связи с крена на таигаж. Он парирует стремление самолета к снижению высоты из-за уменьшения вертикальной составляющей подъемной силы.
В режиме координированного разворота законы управления автопилота имеют следующий вид:
|
|
|


 (2). где
(2). где  - сигналы, подаваемые в АП от задатчиков разворота или тангажа;
- сигналы, подаваемые в АП от задатчиков разворота или тангажа;
 - передаточные коэффициенты от задатчика разворота на рули.
- передаточные коэффициенты от задатчика разворота на рули.
Передаточные коэффициенты автопилота могут регулироваться в достаточно широких пределах с помощью потенциометров, расположенных на пульте управления.
Команда на разворот подается одновременно в два канала:
канал курса и канал крена. При подаче команды на разворот отклоняются элероны и руль поворота.
Передаточные коэффициенты АП подбираются так, чтобы выполнялось условие координированного разворота (рис.1).
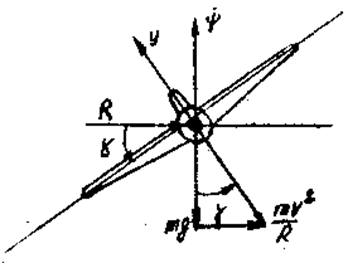
Рис.1. Положение самолета при координированном развороте (развороте без скольжения на крыло).
 (3). где V-скорость полета; R-радиус разворота;
(3). где V-скорость полета; R-радиус разворота;  - угловая скорость разворота
- угловая скорость разворота  g- ускорение свободного падения;m- масса самолета.
g- ускорение свободного падения;m- масса самолета.
Поскольку в автопилоте отсутствуют сигналы по угловой скорости в каналах крена итангажа, то удовлетворительное качество стабилизации и управления самолетом он может обеспечить лишь при ограниченных значениях высоты и скорости полета. Поэтому автопилот АП-5-2М может быть использован на самолетах , имеющих скорость полета не более 900 км/ч.
Принцип действия АП-5-2М.
Все три канала АП отличаются друг от друга лишь чувствительными элементами и мостовыми схемами, на которых суммируются сигналы чувствительных элементов и управляющих сигналов. Рассмотрим принцип действия одного из каналов АП на примере канала элеронов.
Режим стабилизации.
При отклонении крена самолета от заданного значения потенциометрический датчик 1 крена (рис.2.), связанный с самолетом , перемещается относительно движка потенциометра связанного с гировертикалью (ГВ). Происходит разбалансировка главного электрического моста, состоящего из датчика 1 крена, потенциометрического датчика 14 жесткой обратной связи и дополнительных потенциометров. Напряжение разбаланса пропорционально изменению крена и имеет фазу, определяемую направлением отклонения по крену.
Это направление подается на вход первого каскада 5 усилителя рулевых машин. С входа первого каскада усиленное напряжение подается на второй каскад 6 усилителя. Этот каскад называется управляющим каскадом. Далее напряжение подается на дискриминаторный каскад 7. В анодных цепях дискриминаторного каскада включены обмотки реле Р1 и Р2. На аноды ламп дискриминаторного каскада подается напряжение питания противоположных фаз, на сетки - напряжение одной фазы. При достаточной величине сеточного напряжения через одну из ламп дискриминатора, на которой фазы напряжения включение другого анода и сетки совпадают, протекает ток, вызывающий срабатывание реле. Реле замыкает цепь обмоток рабочих соленоидов рулевой машины 9. Рабочие соленоиды обеспечивают фрикционное сцепление в муфте, соединяющей непрерывно вращающийся вал электродвигателя 8 с выходным валом 10 рулевой машины, который через кинематическую передачу перемещает элероны. С выходным валом рулевой машины связан движок датчика 14 обратной связи. При перемещении выходного вала движок потенциометра обратной связи будет перемещаться до тех пор, пока разность между сигналом датчика крена и сигналом жесткой обратной связи не станет меньше зоны нечувствительности АП. При этом входное напряжение достигнет такой величины, при которой анодный ток дискриминаторной лампы будет меньше тока отпускания анодного реле. Рабочий соленоид обесточится и выходной вал рулевой машины остановится. В результате элероны отклонятся на угол, пропорциональный крену самолета. Отклонение элеронов приводит к уменьшению крена самолета, в результате чего сигнал датчика крена уменьшается, что вызывает превышение сигнала жесткой обратной связи над сигналом датчика крена. Это в свою очередь, вызывает включение другого рабочего соленоида рулевой машины и поворот элеронов в направлении исходного положения. По мере уменьшения крена уменьшается и отклонение элеронов.
Главный мост, помимо датчика жесткой обратной связи, имеет два потенциометра центрирования 16. Щетки обоих потенциометров перемещаются от руки при помощи одной ручки (ручки центрирования), расположенной на пульте управления. Поворот ручки центрирования вызывает разбаланс моста, происходит смещение среднего потенциала по потенциометру обратной связи . Напряжение разбалансировки вызывает отклонение элеронов. Отклонение элеронов вызывает кренение самолета. По мере кренения самолета элероны будут возвращаться к прежнему положению. Самолет будет крениться до тех пор, пока элероны не вернутся в исходное положение, а сигнал датчика крена не уравновесит напряжение разбалансировки, созданной потенциометрами центрирования. Таким образом, с помощью потенциометров центрирования можно изменить величину стабилизируемого крена.
Параллельно датчику обратной связи включен реостат 15 изменения позиции руля, предназначенный для регулирования передаточного коэффициента с крена на элероны.
С потенциометрических датчиков 2 и 3 на вход АП подается сигнал перекрестной связи с курса на элероны.
Потенциометр 4 предназначен для регулирования передаточного отношения с курса на элероны.
Режим координированного разворота.
Координированный разворот самолету может быть задан от потенциометрического датчика 12 ручки координированного разворота (или потенциометрического датчика строевой рукоятки летчика). Напряжение с этого датчика через потенциометр 13 подается в канал элеронов, а через потенциометр 11- в канал руля поворота. Подаваемые сигналы вызывают пропорциональное им отклонение элеронов и руля поворота.
Для прекращения разворота ручку координированного разворота или строевую рукоятку ставят в среднее положение. Этим устраняются сигналы координированного разворота. Самолет под действием сигналов с ГВ выходит из крена, руль поворота возвращается в нейтральное положение, и спустя несколько секунд через реле времени осуществляется подача в канал элеронов и руля поворота сигналов стабилизации курса.
Режим бустерного управления.
В режиме бустерного управления сигналы от потенциометрических датчиков отключаются и на вход автопилота подаются только сигналы от строевой рукоятки и от датчиков обратной связи.
Углы отклонения руля в режиме бустерного управления определяются по уравнениям:
 (4).
(4).
В этом случае отклонение строевой рукоятки вправо или влево вызывает пропорциональное перемещение элеронов и руля поворота. Самолет начинает крениться с угловой скоростью, пропорциональной отклонению строевой рукоятки. При возвращении строевой рукоятки в среднее положение полученный крен самолета сохраняется. Вывод самолета из крена осуществляется поворотом строевой ручки в обратную сторону. Аналогичным образом при отклонении строевой рукоятки вперед или назад задаются пропорциональное отклонение руля высоты и угловая скорость самолета относительно поперечной оси. Таким образом, в режиме бустерного управления перемещение строевой рукоятки аналогично перемещению штурвала.
Переключение с режима стабилизации на режим бустерного управления осуществляется с помощью переключателя режима работы строевой рукоятки.
Перед передачей летчиком управления автопилоту необходимо обеспечить равенство нулю суммарного сигнала на входе каждого канала автопилота. Это осуществляется поворотом ручек потенциометров центрирования на пульте управления. При равенстве нулю входных сигналов, сигнальные лампочки, расположенные на пульте управления и включенные параллельно обмоткам рабочих соленоидов, потухнут.
Мостовая схема канала руля поворота аналогична мостовой схеме канала элеронов. Различие заключается в том, что в первой схеме от дополнительного потенциометрического датчика подается сигнал скоростного гироскопа. Величина этого сигнала регулируется так же, как и величина перекрестного сигнала с курса на элероны.
В мостовой схеме канала руля высоты включена схема подачи сигнала на уменьшение угла тангажа при открытии бомболюков. Подача сигнала осуществляется размыканием концевого выключателя. Этот сигнал предотвращает набор высоты самолетом из-за увеличения подъемной силы при открывании бомболюков.
Дата добавления: 2019-02-12; просмотров: 907; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!