Реостатное регулирование угловой скорости асинхронных двигателей
Введение резисторов в цепь ротора (реостатное регулирование) позволяет, как и для двигателей постоянного тока, регулировать угловую скорость двигателя. Регулирование осуществляется вниз от основной угловой скорости. Плавность регулирования зависит от числа ступеней включаемых резисторов.
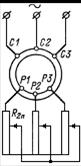
Для асинхронных двигателей с фазным ротором применяется регулирование скорости путем изменения сопротивлений в цепи ротора, а для двигателей с короткозамкнутым ротором используются сопротивления в цепи статора, как это показано на рис. 6.1
 а)
а) 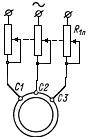 б)
б)
Рисунок 6.1–Схемы включения резисторов в цепь ротора а) и статора б)

 (6-1)
(6-1)
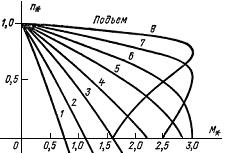
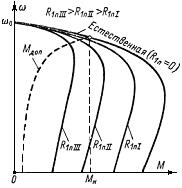
Согласно выражениям (6-1) при увеличении активного сопротивления вторичной цепи увеличивается критическое скольжение, и механическая характеристика становится более мягкой (см. рис. 6.2).
а) б)
Рисунок 6.2 – Механические характеристики асинхронного двигателя при регулировании скорости изменением сопротивления в цепи ротора а) и статора б)
При увеличении скольжения в 2 раза по сравнению с номинальным, т. е. при снижении скорости всего лишь на 8  15%, допустимый момент уменьшается в 2 раза. По этой причине диапазон регулирования обычно не превышает (1,5 2):1.
15%, допустимый момент уменьшается в 2 раза. По этой причине диапазон регулирования обычно не превышает (1,5 2):1.
При неизменном моменте нагрузки и реостатном управлении потери мощности в роторной цепи изменяются пропорционально скольжению, а потери в статоре не зависят от скольжения и остаются неизменными при данном моменте нагрузки. Если, например, скорость двигателя снижена вдвое по сравнению с номинальной, то примерно половина всей потребляемой из сети мощности теряется в регулировочных резисторах. Следовательно, с ростом регулировочного сопротивления при одном и том же скольжении снижается к. п. д.
|
|
|
Рассматриваемый способ регулирования скорости связан со значительными потерями энергии в добавочном сопротивлении и поэтому малоэкономичен. Он применяется главным образом при кратковременной или повторно-кратковременной работе (например, пуско-наладочные режимы некоторых машин, крановые устройства и пр.), а также в приводах с вентиляторным моментом. В последнем случае мощность на валу с уменьшением скорости быстро снижается, и поэтому мощность скольжения и потери в цепи ротора по величине ограничены.
К недостаткам реостатного регулирования скорости относятся также мягкость механических характеристик и зависимость диапазона регулирования от величины нагрузки. В частности, регулирование скорости на холостом ходу практически невозможно.
Реостатное регулирование скорости асинхронного двигателя с фазным ротором продолжает находить практическое применение при невысоких требованиях к точности регулирования.
|
|
|
Реостатное регулирование благодаря своей простоте находит практическое применение, например, в приводе подъемно-транспортных устройств, вентиляторов и насосов малой и средней мощности (до 100 кВт).
Дата добавления: 2019-02-12; просмотров: 138; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!