Регулирование скорости двигателя изменением потока возбуждения
Этот принцип регулирования следует непосредственно из анализа выражений для скоростной и механической характеристики:
Ток возбуждения, а значит, и поток могут изменяться лишь в сторону уменьшения по сравнению с номинальными, так как по условиям нормальной работы обмотки возбуждения ток в ней не может длительно превосходить номинальную величину. Кроме того, даже кратковременное увеличение  оказывается неэффективным, так как в большинстве случаев магнитные цепи электрических машин уже при номинальном потоке близки и насыщению. Следовательно, речь идет лишь о регулировании скорости путем снижения потока или, как принято говорить, путем ослабления потока возбуждения. Основным достоинством рассматриваемого метода регулирования является то, что мощность обмотки возбуждения невелика и составляет, как правило, 2
оказывается неэффективным, так как в большинстве случаев магнитные цепи электрических машин уже при номинальном потоке близки и насыщению. Следовательно, речь идет лишь о регулировании скорости путем снижения потока или, как принято говорить, путем ослабления потока возбуждения. Основным достоинством рассматриваемого метода регулирования является то, что мощность обмотки возбуждения невелика и составляет, как правило, 2  5% мощности двигателя. Для машин малой, а иногда и средней мощности обычно используются резисторы в цепи возбуждения (рис. 5.3,а), а для крупных машин — специальные преобразователи, например генераторы, электромашинные усилители, магнитные усилители, регуляторы напряжения, вентильные преобразователи (рис. 5.3,б).
5% мощности двигателя. Для машин малой, а иногда и средней мощности обычно используются резисторы в цепи возбуждения (рис. 5.3,а), а для крупных машин — специальные преобразователи, например генераторы, электромашинные усилители, магнитные усилители, регуляторы напряжения, вентильные преобразователи (рис. 5.3,б).
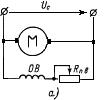
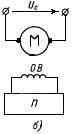
Рисунок 5.3 – Схемы включения двигателя при регулировании скорости изменением магнитного потока
Из равенства
следует, что для того, чтобы при разных потоках  эдс
эдс  была равна одному и тому же номинальному напряжению сети
была равна одному и тому же номинальному напряжению сети  , частота вращения
, частота вращения  должна увеличиваться обратно пропорционально ослаблению потока. Например, если поток ослаблен вдвое, то частота вращения должна увеличиться также вдвое и т. д.
должна увеличиваться обратно пропорционально ослаблению потока. Например, если поток ослаблен вдвое, то частота вращения должна увеличиться также вдвое и т. д.
Электромеханическим характеристикам  при изменении тока возбуждения соответствуют различные значения угловой скорости идеального холостого хода, определяемые по:
при изменении тока возбуждения соответствуют различные значения угловой скорости идеального холостого хода, определяемые по:

На рис. 5.4 по оси ординат отложено значение угловой скорости идеального холостого хода  для естественной характеристики, когда поток
для естественной характеристики, когда поток  .
.
Значения угловых скоростей идеального холостого хода при ослабленном потоке  и
и  лежат, очевидно, выше .
лежат, очевидно, выше .
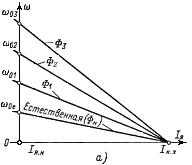
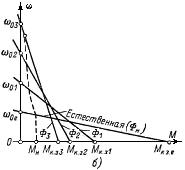
Рисунок 5.4 – Электромеханические и механические характеристики двигателя постоянного тока параллельного возбуждения при регулировании угловой скорости током возбуждения
Все электромеханические характеристики пересекаются с осью абсцисс в одной точке. Последнее следует из того, что при  уравнение для любой электромеханической характеристики имеет вид:
уравнение для любой электромеханической характеристики имеет вид:
откуда определяется ток в якоре двигателя
 .
.
Следовательно, при различных токах возбуждения и при угловой скорости двигателя, равной нулю, ток в якорной цепи равен току короткого замыкания двигателя. Этим значением тока и определяется общая точка пересечения электромеханических характеристик.
Механические характеристики, показанные на рис. 5.4, имеют те же значения угловых скоростей идеального холостого хода, что и для электромеханических характеристик. Это следует из  . Однако эти характеристики не пересекаются в одной точке на оси абсцисс, так как по мере уменьшения потока уменьшается и момент короткого замыкания, определяемый по формуле:
. Однако эти характеристики не пересекаются в одной точке на оси абсцисс, так как по мере уменьшения потока уменьшается и момент короткого замыкания, определяемый по формуле:

Диапазон регулирования ограничивается различными факторами. Главным из них является ухудшение условий коммутации с возрастанием угловой скорости, поскольку реактивная ЭДС, вызывающая искрение на коллекторе пропорциональна току и угловой скорости, т. е.  . Кроме того, при больших угловых скоростях требуется повышать механическую прочность якоря. Нижний предел угловой скорости ограничивается степенью насыщения машины и нагревом обмотки возбуждения, т. е. номинальной угловой скоростью. Большинство двигателей независимого возбуждения, не предназначенных для регулирования скорости, и допускают повышение ее только на 10
. Кроме того, при больших угловых скоростях требуется повышать механическую прочность якоря. Нижний предел угловой скорости ограничивается степенью насыщения машины и нагревом обмотки возбуждения, т. е. номинальной угловой скоростью. Большинство двигателей независимого возбуждения, не предназначенных для регулирования скорости, и допускают повышение ее только на 10  20%. Двигатели, специально сконструированные для работы с регулированием скорости, дают возможность работать со скоростью, в 3 5 раз превышающей скорость идеального холостого хода при номинальном значении магнитного потока.
20%. Двигатели, специально сконструированные для работы с регулированием скорости, дают возможность работать со скоростью, в 3 5 раз превышающей скорость идеального холостого хода при номинальном значении магнитного потока.
Стабильность угловой скорости при регулировании определяется относительным перепадом угловой скорости при изменении нагрузки. В данном случае при номинальном токе якоря как  , поэтому независимо от тока возбуждения относительный перепад сохраняется одним и тем же для естественной и искусственной характеристик, т. е. угловая скорость сравнительно стабильна.
, поэтому независимо от тока возбуждения относительный перепад сохраняется одним и тем же для естественной и искусственной характеристик, т. е. угловая скорость сравнительно стабильна.
Следует отметить, что ослабление потока однозначно приводит к росту скорости только в том случае, когда момент нагрузки на валу двигателя обратно пропорционален скорости. Если же  = const, то увеличение скорости будет иметь место лишь до определенного значении
= const, то увеличение скорости будет иметь место лишь до определенного значении  . При дальнейшем снижении потока начнется и снижение угловой скорости, так как в случае = const ослабление потока приводит к увеличению тока якоря
. При дальнейшем снижении потока начнется и снижение угловой скорости, так как в случае = const ослабление потока приводит к увеличению тока якоря  , а значит, и к увеличению падения напряжения на сопротивлениях цепи якоря. Начиная с некоторого значения потока в процессе его снижения рост скорости идеального холостого хода
, а значит, и к увеличению падения напряжения на сопротивлениях цепи якоря. Начиная с некоторого значения потока в процессе его снижения рост скорости идеального холостого хода  идет медленнее, чем уменьшается скорость, обусловленная падением напряжения на
идет медленнее, чем уменьшается скорость, обусловленная падением напряжения на  .
.
Оценивая энергетические показатели данного способа регулирования скорости двигателей постоянного тока с параллельным возбуждением, необходимо отметить, что потери в силовой цепи двигателя и его кпд такие же, как и при работе на естественной характеристике. Следует также учитывать, что в связи с относительно малой мощностью цепи обмотки возбуждения по сравнению с номинальной мощностью двигателя затраты на регулировочные устройства (реостаты или преобразователи в цепи обмотки возбуждения) невелики.
Двигатели независимого возбуждения, регулируемые путем ослабления потока, широко применяются для привода механизмов, мощность которых с изменением скорости остается постоянной.
6 Влияние параметров  (сопротивление роторной цепи),
(сопротивление роторной цепи),  , f на вид механических характеристик асинхронного двигателя с короткозамкнутым и фазным ротором. Способы регулирования скорости вращения асинхронных двигателей
, f на вид механических характеристик асинхронного двигателя с короткозамкнутым и фазным ротором. Способы регулирования скорости вращения асинхронных двигателей
в последние годы с развитием полупроводниковой техники все большее внимание уделяется применению различных систем регулируемых электроприводов переменного тока с асинхронными двигателями с короткозамкнутым или фазным ротором.
Применение двигателей переменного тока обусловлено их простотой, дешевизной, повышенной надежностью, существенно (в 2  3 раза) меньшими габаритами и массой по сравнению с двигателями постоянного тока. Кроме того, некоторые способы регулирования угловой скорости не требуют специальных преобразовательных устройств.
3 раза) меньшими габаритами и массой по сравнению с двигателями постоянного тока. Кроме того, некоторые способы регулирования угловой скорости не требуют специальных преобразовательных устройств.
Отмечая достоинства двигателей переменного тока, нельзя не обратить внимания на то, что относительно простые способы регулирования угловой скорости электроприводов переменного тока обладают и рядом недостатков, к которым можно отнести в одном случае небольшую плавность, в другом — невысокие энергетические показатели и т. д. Более эффективные способы регулирования осуществляются при помощи сравнительно сложных преобразовательных устройств и средств управления.
Наибольшее распространение получили следующие способы регулирования угловой скорости асинхронного двигателя: 1) реостатное регулирование; 2) переключением числа пар полюсов; 3) частотное регулирование; 4) изменением напряжения на статоре; 5) каскадным включением асинхронного двигателя с другими машинами или преобразователями. Для регулирования угловой скорости, кроме упомянутых, могут быть использованы некоторые другие способы включения электрических двигателей: импульсное регулирование, регулирование изменением подводимого к статору напряжения, регулирование с помощью электромагнитной муфты скольжения и др.
Дата добавления: 2019-02-12; просмотров: 676; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!