Описание экспериментальной установки
Министерство образования и науки РФ
Волгоградский государственный архитектурно-строительный университет
Кафедра нефтяных и газовых сооружений
Исследование статических характеристик звеньев и систем автоматического регулирования
Методические указания к лабораторной работе для студентов изучающих дисциплину «Автоматизация производственных процессов»
Волгоград 2012
УДК 62-52
Исследование статических характеристик звеньев и систем автоматического регулирования: методические указания к лабораторной работе по дисциплине «Автоматизация производственных процессов»/ Сост. В.А. Корчагин; ВолгГАСУ. Волгоград, 2012 – 19с.
В работе рассматриваются методы определения статических характеристик отдельных звеньев и их соединений.
Приводятся описания конструкций, схем и принципов действия усилителя ПТ-Т-62, электропневмопреобразователя ЭПП-63, мембранного исполнительного механизма.
Рассматривается экспериментальный метод определения статических характеристик усилителя, преобразователя, исполнительного механизма и их соединения.
Для студентов изучающих дисциплину «Автоматизация производственных процессов».
Илл.10. Табл.1. Библиогр. 2 назв.
Цель работы
Исследование статических характеристик звеньев систем автоматического регулирования.
Теоретическая часть
|
|
|
Исследование установившихся ( статических, равновесных) состояний является одним из основных вопросов анализа и расчета любой системы автоматического регулирования (САР).
Анализ и расчет САР в установившемся состоянии можно выполнить, имея статические характеристики всех звеньев и системы в целом.
Установившемся является такое состояние, при котором выходная и входная величины звена или системы постоянны во времени.
Статической характеристикой звена или системы называется функциональная связь между выходной и входной величинами в установившемся состоянии.
Статические характеристики описываются уравнениями или представляются в виде графических зависимостей, которые можно получить аналитическим или экспериментальным методами.
Аналитически уравнение статики может быть получено из дифференциального уравнения динамики системы или ее звеньев:

 . (1)
. (1)
В установившимся режиме все производные постоянных значений выходной Y и входной X величин по времени t будут равны нулю. Следовательно, уравнением статической характеристики звена или системы, находящихся под одним входным воздействием, будет выражение
|
|
|
 . (2)
. (2)
Экспериментально статические характеристики определяются следующим образом. Устанавливают начальное значение входной величины  и спустя некоторое время
и спустя некоторое время  регистрируют постоянное значение выходной величины
регистрируют постоянное значение выходной величины  . Затем изменяют входной сигнал на величину
. Затем изменяют входной сигнал на величину  , устанавливают новое значение
, устанавливают новое значение  , измеряют
, измеряют  и т.д. в конце эксперимента получают таблицу результатов измерений
и т.д. в конце эксперимента получают таблицу результатов измерений  .
.
На стадии подготовки к эксперименту изучается звено (система), составляется его структурная схема, выбираются приборы для измерения величин  и
и  ‘, определяется диапазон
‘, определяется диапазон  возможных изменений
возможных изменений  . Оценивается время
. Оценивается время  окончания переходного процесса
окончания переходного процесса  , вызванного ступенчатым изменением
, вызванного ступенчатым изменением  в момент времени
в момент времени  . Величина
. Величина  , где
, где  - момент времени, когда выходная величина принимает постоянное значение, а её производная становится равной нулю.
- момент времени, когда выходная величина принимает постоянное значение, а её производная становится равной нулю.
Планирование эксперимента сводится к выбору числа опытов  ,
,  (обычно
(обычно  ) и оценка времени эксперимента.
) и оценка времени эксперимента.
Результаты эксперимента обрабатываются с помощью методов математической статистики, строится график зависимости  , подбирается эмпирическая формула, наиболее точно отражающая искомую статическую характеристику.
, подбирается эмпирическая формула, наиболее точно отражающая искомую статическую характеристику.
|
|
|
Статические характеристики могут быть линейными и нелинейными, в зависимости от вида уравнения (линейное или нелинейное) связи между выходной величиной y и входной x. Соответственно звенья, обладающие такими характеристиками, называются линейными или нелинейными.
Звенья и системы с линейной статической характеристикой (рис. 1) имеют постоянный коэффициент передачи (усиления), который равен:
 (3)
(3)
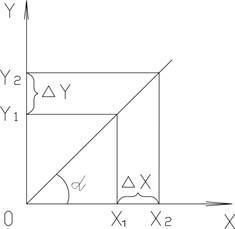
Рис.1. Статическая характеристика линейных звеньев и систем
у нелинейных звеньев и систем (рис. 2) коэффициент передачи, равный тангенсу угла наклона касательных в различных точках статической характеристики, величина переменная
 (4)
(4)
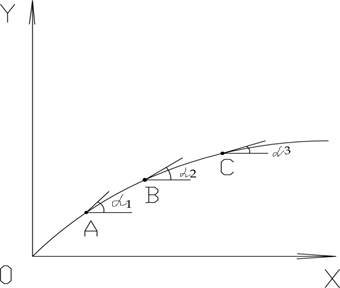
Рис.2. Статическая характеристика нелинейных звеньев и систем
Звенья в системе могут быть соединены между собой последовательно и параллельно. Статические характеристики соединений можно найти по известным статическим характеристикам звеньев, образующих эти соединения.
|
|
|
При последовательном соединении звеньев ( рис. 3 ) входная величина  первого звена является входной величиной соединения, выходная величина
первого звена является входной величиной соединения, выходная величина  первого звена является входной величиной
первого звена является входной величиной  второго звена и т.д. Выходная величина y3 последнего звена является выходной величиной соединения.
второго звена и т.д. Выходная величина y3 последнего звена является выходной величиной соединения.

Рис. 3. Последовательное соединение звеньев
Если известны уравнения статических характеристик всех звеньев:

 (5)
(5)
 ,
,
то уравнение статики соединения будет иметь вид
 , (6)
, (6)
так как  .
.
Статическая характеристика соединения может быть найдена графическим способом (см. прил.).
При параллельном соединении звеньев (рис. 4) выходная величина соединения равна сумме выходных величин звеньев
 (7)
(7)
Входная величина x соединения является общей для всех звеньев.
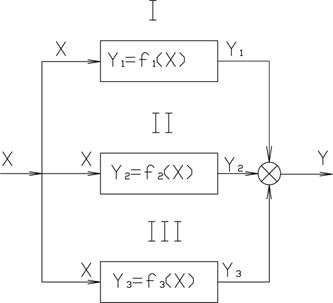
Рис.4. Параллельное соединение звеньев
Если известны уравнения статических характеристик всех звеньев:

 (8)
(8)

то уравнение статики соединения будет иметь вид

 (9)
(9)
Графический способ определения статической характеристики параллельного соединения приведен в приложении.
Приведенные способы определения статических характеристик соединений справедливы для любого числа звеньев.
Описание экспериментальной установки
Общий вид экспериментальной установки представлен на рис.5а. Установка является частью электропневматической (комбинированной) системы управления (регулирования), характерной особенностью, которой является наличие электрических измерительных и усилительных устройств и пневматических исполнительных устройств. Переход от электрической части системы к пневматической осуществляется с помощью электропневматического преобразователя.
Установка состоит из трех звеньев: усилителя постоянного тока (УС), электропневматического преобразователя (ПР) и мембранного исполнительного механизма (МИМ), соединенных между собой последовательно. Для формирования электрических сигналов на входе усилителя в диапазоне 0÷50 мВ, имитирующих сигналы датчиков, служит источник регулируемого напряжения (ИРН). Измерение входных и выходных величин усилителя, преобразователя, исполнительного механизма осуществляется с помощью милливольтметра (мВ), миллиамперметра (мА), манометра (М), индикатора перемещения (И). управление подачей сжатого воздуха к преобразователю производятся с панели управления (ПУ).
На рис.5б приведена функциональная схема установки с указанием вида и характера связей. Статические характеристики усилителя, преобразователя и исполнительного механизма в общем случае описываются уравнениями вида:
 , (10)
, (10)
 , (11)
, (11)
 . (12)
. (12)
Уравнение статики данной системы
 (13)
(13)
Рассмотрим принцип действия и устройство каждого из приборов.
3.1. Усилитель ПТ-Т-62 предназначен для преобразования и предварительного усиления напряжения постоянного тока от термопар, радиационных пирометров и других низкоомных датчиков. Принципиальная электрическая и функциональная схемы даны на рис.6 а,б. Усилитель состоит из измерительного моста и трехкаскадного усилителя, охваченного цепью обратной связи по выходному току.
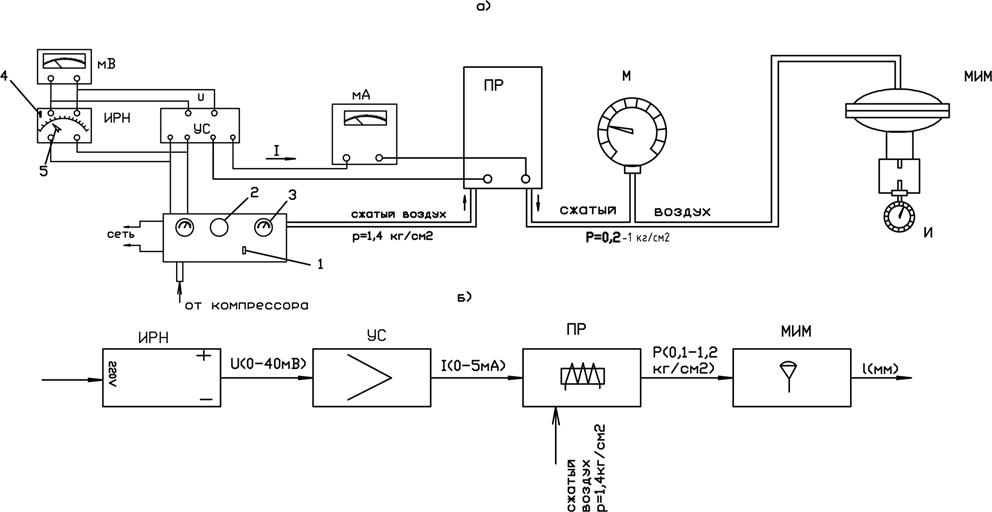
Рис.5. Схема установки:
а- общий вид
б – функциональная схема
| 8 |
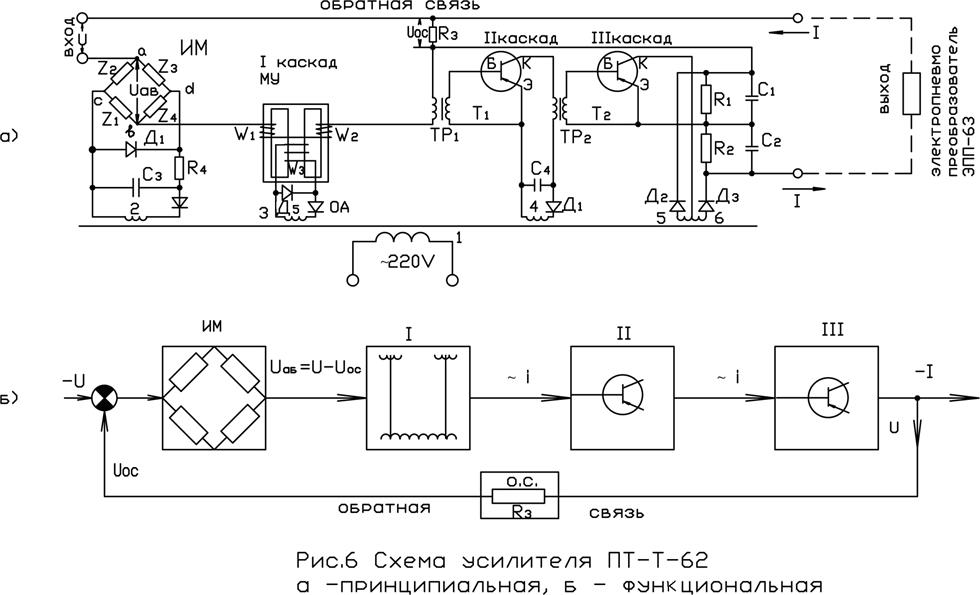
Первым каскадом усиления является магнитный усилитель (МУ), который одновременно служит и модулятором (преобразователем напряжения постоянного тока в напряжение переменного тока).
В равновесном состоянии усилителя входное усиливаемое напряжение U уравновешивается напряжением Uab, снимаемым с диагонали моста (ab), и падением напряжения Uoc на сопротивлении обратной связи R3, т.е.  Поэтому постоянный ток, протекающий в обмотках подмагничивания W1, W2 магнитного усилителя, равен нулю.
Поэтому постоянный ток, протекающий в обмотках подмагничивания W1, W2 магнитного усилителя, равен нулю.
Обмотка возбуждения W3 усилителя питается пульсирующим напряжением, которое снимается с диода (ОД). Так как обмотки W1, W2 включены последовательно и встречно, то наводимые в этих обмотках переменные ЭДС взаимно компенсируются, и ток в первичной обмотке трансформатора (ТР1) равен нулю.
При увеличении входного напряжения в обмотках W1 и W2 появляется постоянный ток, и один из крайних стержней сердечника дополнительно намагничивается, а другой – размагничивается. В этом случае наводимые в обмотках W1 и W2 переменные ЭДС не равны друг другу и через обмотку межкаскадного трансформатора (ТР1) течет переменный ток.
Вторым каскадом усиления является полупроводниковый триод (Т1), который включен по трансформаторной схеме с общим эмиттером. Питание каскада осуществляется от отдельного выпрямителя (Д1). Переменное напряжение с выхода магнитного усилителя через трансформатор (ТР1) подается на базу и эмиттер триода.
Третий каскад усиления выполнен на триоде (Т2), который одновременно служит и демодулятором (выпрямителем).
При подключении на выход усилителя нагрузки (катушки подмагничивания электропневматического преобразователя) в ее цепи протекает усиленный ток I, который на сопротивлении обратной связи R3 создает падение напряжения Uос , уравновешивающее входное напряжение U. Введение обратной связи обеспечивает линейную связь между выходным током и входным напряжением.
3.2 Электропневматический преобразователь ЭПП – 63 предназначен для преобразования сигнала постоянного тока 0-5 мА в пропорциональный унифицированный пневматический сигнал 0,2-1,0 кгс/см2 (0,02 – 0,1 МПа). Принципиальная и функциональная схемы прибора приведены на рис.7 и 8.
Преобразователь ЭПП-63 состоит из трех блоков: электромеханического преобразователя (ЭМП), механопневматического преобразователя (МПП) и пневматического усилителя мощности (ПУМ). Назначение первого блока – линейное преобразование величины постоянного тока в механическое усилие Fвт , назначение второго – преобразование механического усилия втягивания в пневматический сигнал Рс , назначение третьего – усиление пневматического сигнала до величины Р.
Электромеханический преобразователь состоит из постоянного магнита (1) и подвижной катушки (2), укрепленной на основном рычаге (3). Постоянный ток I от усилителя ПТ-Т-62, проходя по катушке (2), создает усилие втягивания Fвт , под действием которого катушка втягивается в зазор постоянного магнита. В равновесном состоянии преобразователя это усилие уравновешивается на рычажной системе 3-4-5 усилием Foc , создавемым сильфоном обратной связи (6).
| 10 |
Пневматический усилитель мощности состоит из междроссельной камеры А и камеры Б, разделенных дифференциальной мембраной (9). Мембрана жестко связана посредством полого штока (10) с клапаном (11). Усилитель питается сжатым воздухом давлением 1,4 кгс/см2 (0,14 МПа).
Работает электропневматический преобразователь следующим образом. При увеличении тока I катушка втягивается в зазор постоянного магнита. Равновесие рычажной системы 3-4-5 нарушается, так как усилие втягивания больше усилия со стороны сильфона обратной связи,
Fвт > Foc. Рычаги (3) и (5), соединенные тягой (4), поворачиваются вокруг шарниров (12) и (13). При этом уменьшается зазор между соплом и заслонкой, что вызывает увеличение сопротивления струе воздуха, истекающей из сопла. В результате повышается давление Рс
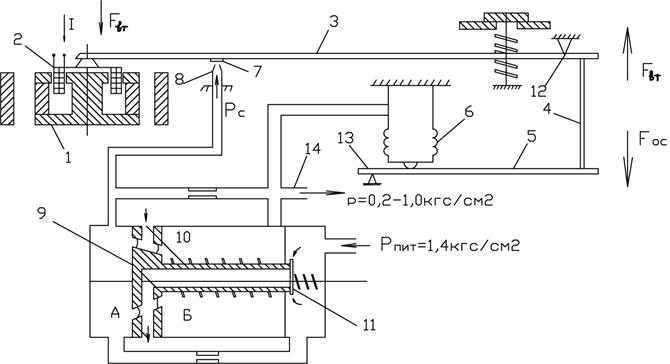
Рис.7. Принципиальная схема ЭПП-63:
1-магнит; 2- катушка; 3- основной рычаг; 4- тяга; 5- малый рычаг; 6- сильфон обратной связи; 7- заслонка; 8- сопло; 9- дифференциальная мембрана; 10- шток; 11- клапан; 12,13- шарниры; 14- выходная линия.
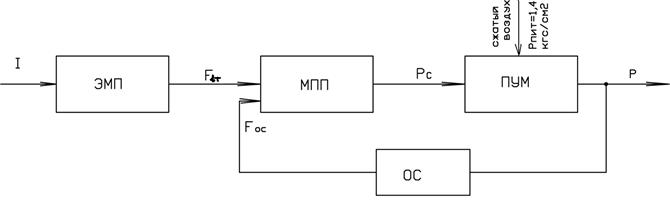
Рис.8. Функциональная схема ЭПП-63
ЭМП – электромеханический преобразователь;
МПП – механопневматический преобразователь;
ПУМ – пневматический усилитель мощности;
ОС- обратная связь.
воздуха в линии сопла и междроссельной камере А. Дифференциальная мембрана (9) прогибается и шток (10), жестко связанный с мембраной, увеличивает степень открытия клапана (11). При этом давление воздуха Р на выходе камеры Б в линии (14) и в сильфоне обратной связи (6) повышается. Повышение давления в сильфоне вызывает увеличение усиления обратной связи Foc на рычаге (5) и тяге (4), направленное против Fвт . Равновесие рычажной системы 3-4-5 восстанавливается при определенном соотношении между выходным давлением Р и входным током I при новом соотношении давления в выходной Б и междроссельной А камерах.
3.3 Мембранный исполнительный механизм является заключительным элементом системы автоматического регулирования и осуществляет воздействие на регулирующие органы объектов регулирования.
Схема мембранного исполнительного механизма показана на рис.9. Принцип действия мембранного пневматического привода состоит в том, что резиновая мембрана (1), закрепленная между крышками (2) и (3), может прогибаться в зависимости от разности давлений, создаваемых, с одной стороны, сжатым воздухом, с другой – спиральной пружиной (4). Сжатый воздух давлением Р подается через отверстие (5). К металлическому диску (6) прикреплен шток (7) привода, который соединяется со штоком регулирующего органа (клапана, заслонки, шибера). При прогибе мембраны происходит перемещение выходного штока. Давление воздуха, поступающего от электропневмопреобразователя, является входной величиной привода и меняется в пределах от 0,2 до 1 кгс/см2 (0,02 – 0,1 МПа). Начальное значение давления воздуха, при котором начинает перемещаться шток, устанавливается путем изменения степени сжатия пружины (4). Выходной величиной является перемещение l выходного штока пневмопривода. Измерение величины перемещения штока осуществляется индикатором (8) с ценой деления 0,01 мм.
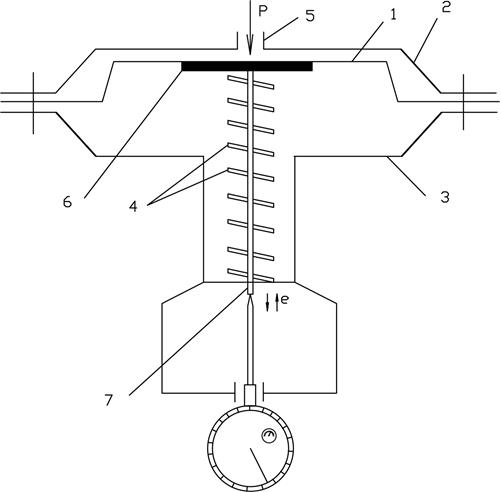
Рис. 9. Мембранный исполнительный механизм
Дата добавления: 2019-01-14; просмотров: 197; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!