Качество линейных систем автоматического управления
Основные параметры качества систем управления
Качество представляет собой комплексную оценку работы системы управления, включающую устойчивость, точность, быстродействие и зависящую от назначения систему.
Устойчивость системы обеспечивает затухание переходных процессов с течением времени, т.е. обеспечивает принципиальную возможность прихода системы в некоторое установившееся состояние при любом внешнем воздействии. Однако далее требуется, во-первых, чтобы это установившееся состояние было достаточно близко к заданному и, во-вторых, чтобы затухание переходного процесса было достаточно быстрым, а отклонения при этом были бы невелики.
Качество работы любой системы управления, в конечном счете, определяется величиной ошибки, равной разности между требуемым и действительным значениями управляемой величины: x(t) = g(t) - y(t).

Рисунок 3.1 – Временная диаграмма изменения ошибки
Характер процесса изменения ошибки, представленного на рисунке 3.1, позволяет сделать вывод об устойчивости системы, так как процесс сходится, оценить точность работы системы по величине установившейся ошибки Dуст = x(¥) и оценить быстродействие системы по времени регулирования tр, то есть времени, за которое ошибка системы достигает допустимое значение и при дальнейшем росте времени не превышает его.
Процесс изменения ошибки во времени определяется решением дифференциального уравнения (3.1) динамики замкнутой системы:
|
|
|
| D(p)x(t) = Q(p)g(t) + N(p)f(t), | (3.1) |
где D(p) – полином степени n от символа дифференцирования p;
Q(p) – полином степени m (m  n) от символа дифференцирования p;
n) от символа дифференцирования p;
N(p) – полином степени k (k n) от символа дифференцирования p;
x(t) – рассогласование (ошибка);
g(t) – задающее воздействие;
f(t) – возмущающее воздействие.
Это решение включает в себя две составляющие:
| x(t) = xn(t) + xв(t), | (3.2) |
где xn(t) – общее решение однородного уравнения D(p)x(t) = 0, представляющее собой переходный процесс в системе и имеющее вид:
 , ,
| (3.3) |
где ci – постоянные коэффициенты, определяемые из начальных условий процесса;
pi – корни характеристического уравнения D(p) = 0;
xв(t) – частное или вынужденное решение.
xв(t) определяется правой частью дифференциального уравнения динамики замкнутой системы (3.1) и представляет собой установившуюся часть процесса управления.
Таким образом, полное решение (3.2), описывающее процесс в линейной системе, представляет собой собственное движение системы xn(t), наложенное на установившуюся составляющую xB(t).
Знание мгновенного значения ошибки в течение всего времени работы системы дает возможность наиболее полно судить о ее свойствах.
|
|
|
Однако ошибка системы зависит не только от характеристик самой системы (полиномов D(p), Q(p), N(p)), но и от свойств, действующих на нее воздействий. Вследствие случайности задающего g(t) и возмущающего f(t) воздействий такой подход не может быть реализован. Поэтому приходится оценивать качество системы управления по некоторым ее свойствам, проявляющимся при различных типовых воздействиях. Для определения качественных показателей системы управления в этом случае используются так называемые критерии качества.
В настоящее время разработано большое число различных критериев качества, с помощью которых оценивается либо точность системы в установившемся состоянии, либо качество переходного процесса.
Точность системы задается и определяется в установившихся режимах величиной установившейся ошибки. Для анализа качества переходного процесса существует три основных вида приближенных оценок: частотные; корневые; интегральные.
Прямые показатели качества
Прямые показатели определяются непосредственно по переходной характеристике по каналу управления или возмущения. Если переходная характеристика представляет собой затухающие колебания, то система считается устойчивой. При этом допускается не более 2 – 3-х колебаний.
|
|
|
К прямым показателям относятся:
· tP – время регулирования (время переходного процесса);
· tн – время нарастания;
·  – перерегулирование;
– перерегулирование;
· μ – колебательность;
·  – степень затухания;
– степень затухания;
· ΔСТ – статическая ошибка.
Время регулирования– интервал времени от подачи единичного ступенчатого воздействия x(t) = 1(t) на вход системы до момента, когда отклонение переходной характеристики h(t) от установившегося значения hуст не превышает некоторой заданной величины q. Значение интервала q выбирают обычно равное 2 % или 5 % от величины hуст рисунок 3.2
Для случая, когда hуст = 0 (переходный процесс по каналу возмущения), значение q вычисляется от максимального значения hmax выходного параметра. Время регулирования tP (время переходного процесса) характеризует быстродействие системы.
Время нарастания– интервал времени, за который переходная характеристика h(t) при подаче единичного ступенчатого воздействия x(t) = 1(t) на вход системы нарастает от 10 до 90 % от установившегося значения hуст.
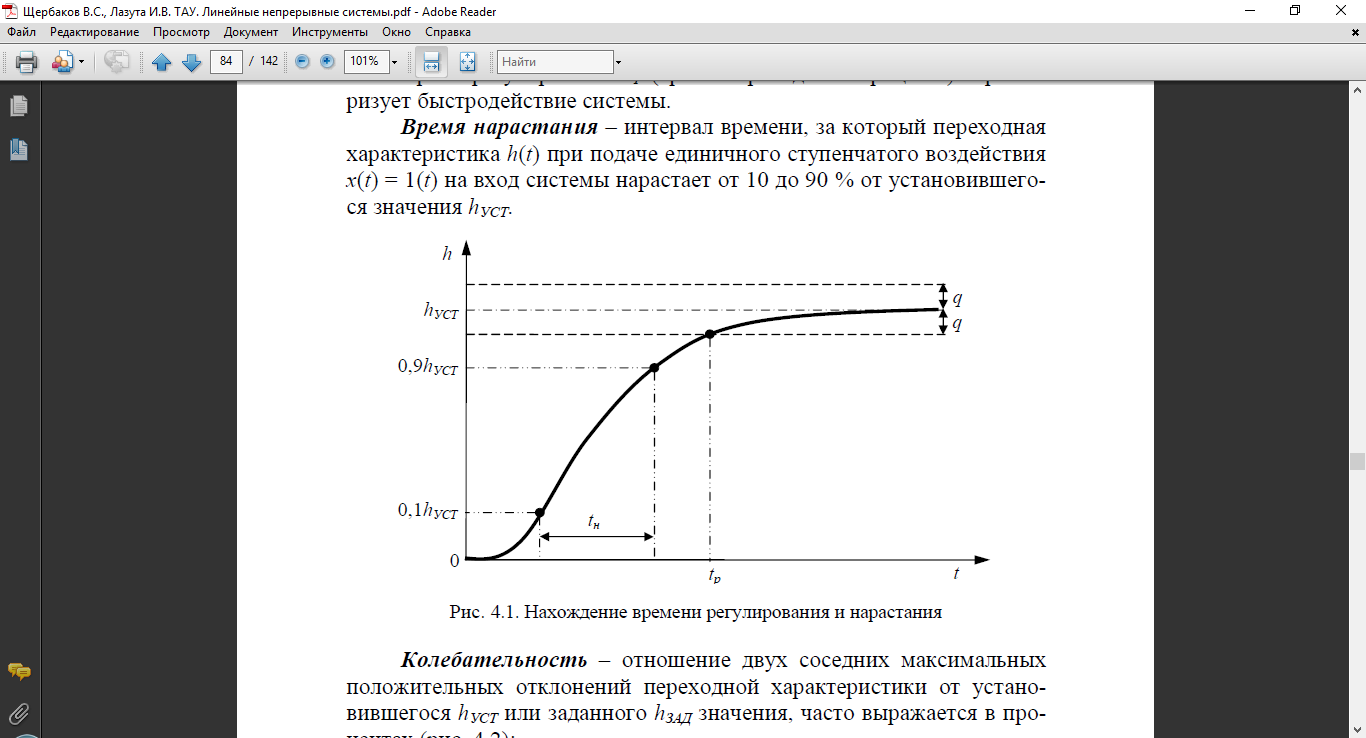
Рисунок 3.2 – Нахождение времени регулирования и нарастания.
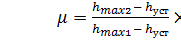
Колебательность – отношение двух соседних максимальных положительных отклонений переходной характеристики от установившегося hУСТ или заданного hЗАД значения, часто выражается в процентах рисунок 3.3
|
|
|
 , ,
| (3.4) |
где hmax1, hmax2 – максимальные положительные отклонения переходной характеристики;
hуст, – установившееся значение;
hзад – заданное значение.
Если система устойчива, то коэффициент колебательности μ будет лежать в пределах от 0 до 99 %. При коэффициенте колебательности 100 % и больше система будет неустойчивой. Коэффициент колебательности будет стремиться к 0, если переходный процесс является апериодическим и соответственно система будет абсолютно устойчивой. Для наиболее устойчивой работы коэффициент колебательности μ должен быть минимален, то есть равным нулю.
Перерегулирование – это отношение первого максимального положительного отклонения переходной характеристики от установившегося hуст или заданного hзад значения к установившемуся или заданному значению, выраженное в процентах рисунок 3.3.
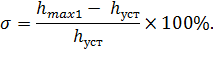
| (3.5) |
В большинстве случаев требуется, чтобы перерегулирование не превышало 10 %.
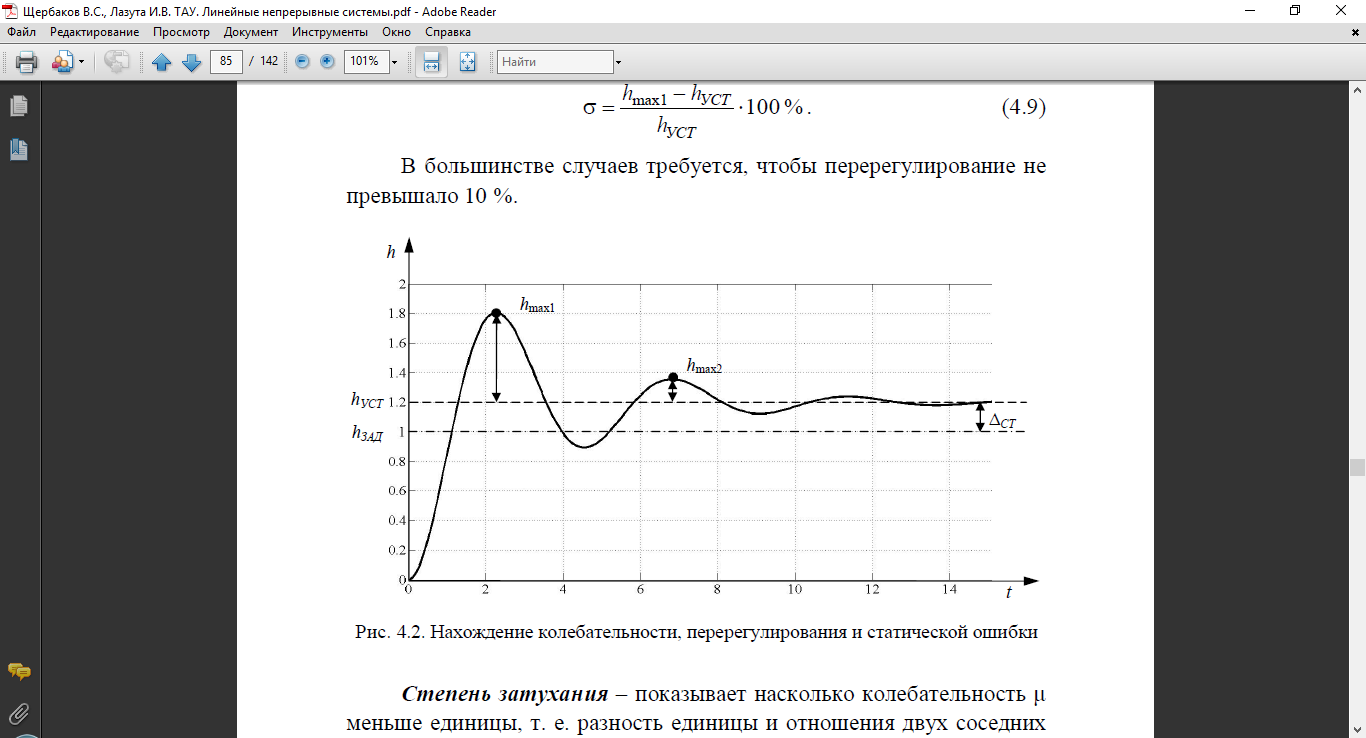
Рисунок 3.3 – Нахождение колебательности, перерегулирования и статической ошибки.
Степень затухания – показывает насколько колебательность μ меньше единицы, т. е. разность единицы и отношения двух соседних максимальных положительных отклонений переходной характеристики от установившегося hУСТ или заданного hЗАД значения рисунок 3.3.

| (3.6) |
Статическая ошибка – разница между заданным и установившимся значением регулируемой величины рисунок 3.3.
Дата добавления: 2018-04-15; просмотров: 1406; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!