Принцип возможных перемещений
Пример 7.1
|
| Рис. 7.1 |
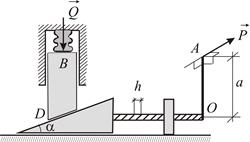
Определить зависимость между модулями сил  и
и  в клиновом прессе, если сила приложена к концу рукоятки длины
в клиновом прессе, если сила приложена к концу рукоятки длины  перпендикулярно плоскости, содержащей рукоятку и ось винта (Рис. 7.1). Шаг винта равен
перпендикулярно плоскости, содержащей рукоятку и ось винта (Рис. 7.1). Шаг винта равен  . Угол при вершине клина
. Угол при вершине клина  .
.
Дадим системе возможное перемещение: пусть  – угол поворота рукоятки;
– угол поворота рукоятки;  – перемещение точки
– перемещение точки  ;
;  – горизонтальное перемещение клина; – вертикальное перемещение точки
– горизонтальное перемещение клина; – вертикальное перемещение точки  .
.
При исследовании условий равновесия механизмов в зависимости от конкретной задачи, исходя из соображений удобства, можно использовать как возможные скорости, так и возможные перемещения. Для сравнения в этом первом разбираемом примере рассмотрим и возможные перемещения, и возможные скорости.
Условия равновесия системы можно записать в виде:

Возможные перемещения связаны между собой соотношениями (Рис. 7.2)

или (для возможных скоростей)


|
| Рис. 7.2 |
Отсюда:

Теперь условия равновесия записываются в виде

Отсюда:

Пример 7.2
|
| Рис. 7.3 |
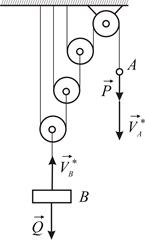
Полиспаст состоит из неподвижного блока и  подвижных блоков (Рис. 7.3). Определить в случае равновесия отношение веса
подвижных блоков (Рис. 7.3). Определить в случае равновесия отношение веса  поднимаемого груза к величине силы
поднимаемого груза к величине силы  , приложенной к свободному концу троса.
, приложенной к свободному концу троса.
|
|
|
Условие равновесия имеет вид
Рассмотрим первый из подвижных блоков. Точка  – мгновенный центр скоростей блока (Рис. 7.4). Возможная скорость точки
– мгновенный центр скоростей блока (Рис. 7.4). Возможная скорость точки  численно равна возможной скорости точки . Следовательно,
численно равна возможной скорости точки . Следовательно,  Скорость центра каждого последующего подвижного блока равна половине скорости центра предыдущего подвижного блока. Таким образом,
Скорость центра каждого последующего подвижного блока равна половине скорости центра предыдущего подвижного блока. Таким образом,

|
| Рис. 7.4 |

Подставляя полученный результат в условие равновесия, имеем:

Пример 7.3
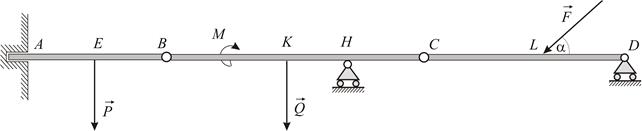
Составная балка  , лежащая на двух опорах
, лежащая на двух опорах  и , состоит из трех балок
и , состоит из трех балок  ,
,  и , шарнирно соединенных в точках и
и , шарнирно соединенных в точках и  . Балка в сечении защемлена в стене. К балке приложены три силы , и
. Балка в сечении защемлена в стене. К балке приложены три силы , и  и момент
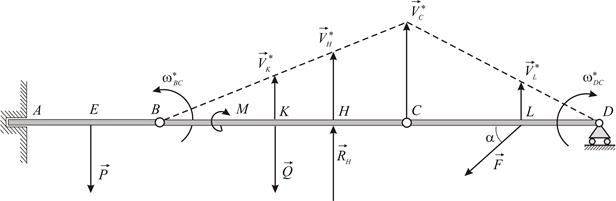
и момент  (Рис.7.5). Определить реакцию опоры , составляющие реакции заделки, а также момент реакции заделки.
(Рис.7.5). Определить реакцию опоры , составляющие реакции заделки, а также момент реакции заделки.
|
|
|
|
| Рис. 7.5 |
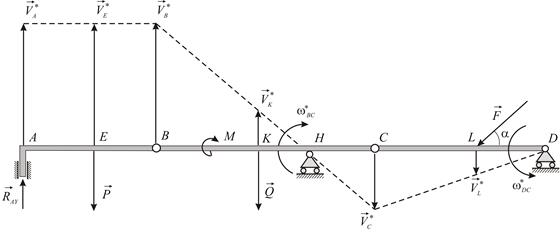
1. Определим реакцию опоры . Отбросим подвижный шарнир , заменив его действие реакцией  . Зададим возможные скорости системы. Эпюры возможных скоростей приведены на Рис. 7.6. Условие равновесия принимает вид:
. Зададим возможные скорости системы. Эпюры возможных скоростей приведены на Рис. 7.6. Условие равновесия принимает вид:

Балка вращается вокруг шарнира и, следовательно,
Балка совершает плоскопараллельное движение. Ее мгновенный центр скоростей совпадает с точкой . Возможные скорости связаны соотношениями

|
| Рис. 7.6 |
Выражая возможные скорости через какую-нибудь одну, например  , записываем условие равновесия в виде:
, записываем условие равновесия в виде:

Поскольку – любая возможная скорость (не равная нулю), приравниваем скобку к нулю и находим:

2. Найдем горизонтальную составляющую реакции заделки. Заменим жесткое защемление в сечении на скользящую заделку с горизонтальными направляющими (Рис.7.7). При этом необходимо ввести горизонтальную составляющую реакции заделки  Составная балка получает возможность перемещаться поступательно в горизонтальном направлении.
Составная балка получает возможность перемещаться поступательно в горизонтальном направлении.
|
|
|
Условие равновесия принимает вид:

Но  и, следовательно,
и, следовательно,


|
| Рис. 7.7 |
3. Определим вертикальную составляющую реакции заделки. Заменим жесткую заделку на скользящую с вертикальными направляющими (Рис. 7.8). Балка получает возможность поступательного перемещения по вертикали. Балка  может двигаться плоско–параллельно, имея мгновенный центр скоростей в точке . Мгновенный центр скоростей балки
может двигаться плоско–параллельно, имея мгновенный центр скоростей в точке . Мгновенный центр скоростей балки  по–прежнему находится в точке . Условие равновесия принимает вид:
по–прежнему находится в точке . Условие равновесия принимает вид:

|
| Рис. 7.8 |
Возможные скорости связаны между собой соотношениями:

Выражая возможные скорости через какую-нибудь одну, например  , получаем:
, получаем:

откуда:

|
|
|
4. Для определения реактивного момента  предоставим балке возможность вращаться, заменив жесткое защемление в сечении неподвижным шарниром (Рис. 7.9).
предоставим балке возможность вращаться, заменив жесткое защемление в сечении неподвижным шарниром (Рис. 7.9).
Условие равновесия принимает вид:

По сравнению с предыдущим случаем изменилось кинематическое состояние только стержня . Теперь

|
| Рис. 7.9 |
Опять вынося за скобку ,

получаем:

Общее уравнение динамики
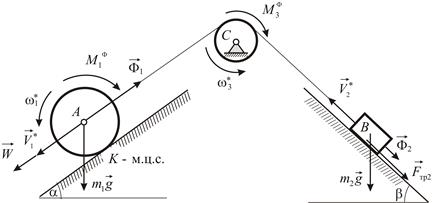
Пример 7.4
Колесо скатывается без скольжения по наклонной плоскости, образующей угол с горизонтом (Рис. 7.10). К оси колеса привязан трос, переброшенный через неподвижный блок и прикрепленный к грузу , поднимающемуся по наклонной плоскости, образующей угол  с горизонтом. В начальный момент система находилась в покое. Колесо и блок представляют собой сплошные однородные диски с массами
с горизонтом. В начальный момент система находилась в покое. Колесо и блок представляют собой сплошные однородные диски с массами  и и радиусами
и и радиусами  и
и  соответственно. Масса груза равна
соответственно. Масса груза равна  . Коэффициент трения между грузом и наклонной плоскостью равен
. Коэффициент трения между грузом и наклонной плоскостью равен  . Определить ускорение оси катка.
. Определить ускорение оси катка.
При составлении силовой схемы необходимо учесть приложенные к системе активные силы, которые могут совершить работу на возможном перемещении системы, все силы инерции и реакции неидеальных связей (в данном случае силу трения  ). Общее уравнение динамики можно записать как через возможные перемещения, так и через возможные скорости. В рассматриваемом случае получаем:
). Общее уравнение динамики можно записать как через возможные перемещения, так и через возможные скорости. В рассматриваемом случае получаем:

причем, 
|
| Рис. 7.10 |
Условия, налагаемые связями, приводят к соотношениям:

Отсюда получаем соотношения между ускорениями:

Полученные результаты подставляем в общее уравнение динамики:

Подставляя значения моментов инерции и силы трения, окончательно получаем:
 ,
,
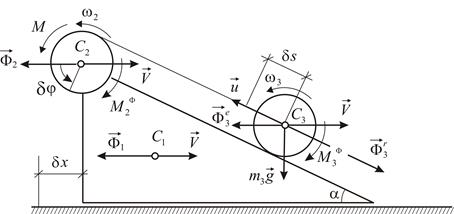
Пример 7.5
Призма (тело 1) массы может скользить по идеально гладкой горизонтальной поверхности. В вершине призмы закреплена ось барабана лебедки (тело 2). Конец троса прикреплен к оси катка (тело 3), который катится без проскальзывания по боковой поверхности призмы (Рис. 7.11). Барабан лебедки и каток — сплошные однородные цилиндры одинаковой массы  и одинакового радиуса
и одинакового радиуса  . К барабану лебедки приложен постоянный вращающий момент .
. К барабану лебедки приложен постоянный вращающий момент .
Получить дифференциальные уравнения движения системы на основе общего уравнения динамики.
Силовая и кинематическая схемы представлены на Рис. 7.11. Общее уравнение динамики в рассматриваемом случае имеет вид:

Система имеет две степени свободы. В качестве независимых координат примем координату призмы  и относительную координату оси катка
и относительную координату оси катка  . Кинематические условия, налагаемые связями, имеют вид:
. Кинематические условия, налагаемые связями, имеют вид:
 Отсюда:
Отсюда:  и
и 
Учитывая, что



получаем общее уравнение динамики в виде:


|
| Рис. 7.11 |
Поскольку возможные перемещения и  могут принимать любые значения и не зависят друг от друга, общее уравнение динамики распадается на систему двух дифференциальных уравнений относительно координат и :
могут принимать любые значения и не зависят друг от друга, общее уравнение динамики распадается на систему двух дифференциальных уравнений относительно координат и :

ЗАДАЧИ, РЕКОМЕНДУЕМЫЕ ДЛЯ РАЗБОРА В АУДИТОРИИ И ДЛЯ ЗАДАНИЯ НА ДОМ:
Из сборника задач И.В.Мещерского: 46.1; 46.2; 46.3; 46.8; 46.9; 46.10; 46.11; 46.12; 46.20; 46.21; 46.22; 46.24; 46.26; 46.27; 46.29; 47.5; 47.9; 47.11; 47.12; 47.15.
Из учебника «ТЕОРЕТИЧЕСКАЯ МЕХАНИКА - теория и практика»: комплекты СР-34; СР-35.
ПРАКТИЧЕСКОЕ ЗАНЯТИЕ № 8
УРАВНЕНИЯ ЛАГРАНЖА 2-го РОДА
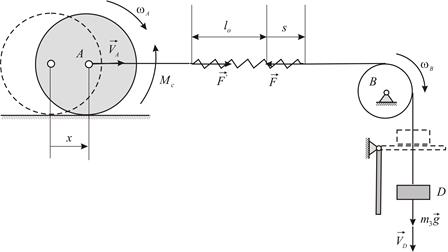
Пример 8.1
Каток , представляющий собой сплошной однородный цилиндр массы радиуса  , катится без проскальзывания по горизонтальной поверхности. К оси катка привязан трос, переброшенный через неподвижный блок и растягиваемый грузом , масса которого (Рис. 8.1). Блок представляет собой сплошной однородный цилиндр массы . В начальный момент система находится в покое, пружина не растянута. Определить движение системы, предполагая, что при качении катка возникает постоянный момент сопротивления .
, катится без проскальзывания по горизонтальной поверхности. К оси катка привязан трос, переброшенный через неподвижный блок и растягиваемый грузом , масса которого (Рис. 8.1). Блок представляет собой сплошной однородный цилиндр массы . В начальный момент система находится в покое, пружина не растянута. Определить движение системы, предполагая, что при качении катка возникает постоянный момент сопротивления .
Система имеет две степени свободы. В качестве обобщенных координат примем координату оси катка и удлинение пружины . Вычислим кинетическую энергию системы:

Уравнения Лагранжа 2–го рода в рассматриваемом случае имеют вид:

Кинетическая энергия в рассматриваемом случае не зависит явным образом от обобщенных координат, поэтому

|
| Рис.8.1 |
Вычислим частные производные по обобщенным скоростям:

Вычислим обобщенные силы: пусть  тогда
тогда

пусть  тогда
тогда  ,
,
где  — коэффициент жесткости пружины.
— коэффициент жесткости пружины.
Положим для определенности  В этом случае уравнения Лагранжа примут вид:
В этом случае уравнения Лагранжа примут вид:

Интегрируя полученную систему уравнений при нулевых начальных условиях, находим:

где

причём, 
Пример 8.2
Каток массы радиуса может перекатываться без скольжения по горизонтальной плоскости. К оси катка привязана нерастяжимая нить длинной , на конце которой закреплен шарик массы (Рис.10.3). Составить дифференциальные уравнения малых колебаний системы. Каток считать сплошным однородным цилиндром. Сопротивлением качения пренебречь.
Система имеет две степени свободы. В качестве обобщенных координат примем координату оси катка и угол отклонения нити от вертикали  . Вычислим кинетическую энергию системы:
. Вычислим кинетическую энергию системы:
Каток катится без проскальзывания и, следовательно, 
Учитывая, что 
вычисляем проекции скорости точки на оси координат:

Тогда

Полагая для определенности  , получаем кинетическую энергию системы:
, получаем кинетическую энергию системы:

Вычислим частные производные по обобщенным скоростям:

|
| Рис.10.3 |
Вычислим частные производные по обобщенным координатам:
Вычислим обобщенные силы: пусть  тогда
тогда  . Отсюда
. Отсюда 
Пусть  тогда
тогда 
Отсюда: 
Уравнения Лагранжа принимают вид:


По условию колебания малые, т.е.  и
и  Пренебрегая малыми более высокого порядка
Пренебрегая малыми более высокого порядка  получаем:
получаем:

Пример 8.3
Призма (тело 1) массы может скользить по идеально гладкой горизонтальной поверхности. В вершине призмы закреплена ось барабана лебедки (тело 2). Конец троса прикреплен к оси катка (тело 3), который катится без проскальзывания по боковой поверхности призмы (Рис. 8.3). Барабан лебедки и каток — сплошные однородные цилиндры одинаковой массы и одинакового радиуса . К барабану лебедки приложен постоянный вращающий момент .
Получить дифференциальные уравнения движения системы на основе уравнений Лагранжа 2–го рода.
Система имеет две степени свободы. В качестве обобщенных координат примем координату призмы и относительную координату оси катка . Вычислим кинетическую энергию системы:

Учитывая, что 
получаем:


|
| Рис. 8.3 |
Вычислим обобщенные силы: пусть тогда  отсюда
отсюда 
пусть  тогда
тогда  и
и

 отсюда
отсюда 
Уравнения Лагранжа принимают вид:


ЗАДАЧИ, РЕКОМЕНДУЕМЫЕ ДЛЯ РАЗБОРА В АУДИТОРИИ И ДЛЯ ЗАДАНИЯ НА ДОМ:
Из сборника задач И.В.Мещерского: 48.12; 48.19; 48.28; 48.26; 48.27; 48.28; 48.29.
Из учебника «ТЕОРЕТИЧЕСКАЯ МЕХАНИКА - теория и практика»: комплект СР-36.
ЛИТЕРАТУРА:
- Антонов В.И., Белов В.А., Егорычев О.О., Степанов Р.Н. //Курс теоретической механики (теория и практика) – М.: Архитектура – С, 2011 г.
- Мещерский И.В.// Сборник задач по теоретической механике. – Спб.: Лань, 2010 г.
КОНТРОЛЬНЫЕ МЕРОПРИЯТИЯ:
Дата добавления: 2019-09-02; просмотров: 366; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!