Построение имитационной модели производства на базе Сети Петри.
Эффективным инструментом реализации ММ является аппарат теории Сетей Петри (СП). Теория СП интенсивно развивается как в направлении совершенствования и обогащения самой теории, так и в направлении практического использования методов теории СП для моделирования работы сложных динамических систем [44] и управления производственными объектами [32].
СП являются удобным средством решения задач, связанных с анализом, моделированием к представлением системах с последовательно-параллельным действием объектов. Перспективной областью исследований является применение аппарата СП для имитационного моделирования процессов и объектов.
Теория СП является специальной частью общей теории сетей. Прикладная теория СП связана главным образом с применением СП к моделированию систем, их анализу и получающимся в результате этого глубоким проникновением в моделируемые системы.
Сеть Петри С является четверкой
С n (Р,Т,I,0),
где Рn (p1 ,p2,...,pn)- - конечное множество позиций, n³0;
Tn{t1,t2,...,tm} - конечное множество переходов, m³0; множества P и T не пересекаются, т.е.
Р Ç Т n 0
I - входная функция, отображающая переход tj в множество позиций I(tj), называемых входными позициями перехода;
О - выходная функция, отображающая переход tj в множество позиций О(tj), называемых выходными позициями перехода.
Позиция рi является входной позицией перехода tj в том случае, если piÎI(tj); рi является выходной позицией, если piÎO(tj).
При работе СП удобно использовать графическое представление сети. Теоретико-графовым представлением СП является двудольный ориентированный мультиграф, т.к. он допускает существование кратных дуг от одной вершины графа к другой. Двудольность графа СП означает, что он обладает двумя типами узлов. Кружок о - является позицией, а планка | - переходом. Ориентированные дуги соединяют позиции с переходами и наоборот.
Позиции могут быть маркированными. Маркировка m есть присвоение фишек позициям СП. Фишки используются для определения выполнения сети. Выполнением СП управляют количество и распределение фишек в сети посредством запуска переходов. Переход запускается удалением фишек из его входных позиций и образованием новых фишек, помещаемых в его выходные позиции.
Маркированная СП может быть записана в виде
М n (Р ,Т ,I,0,m)
Переход может запускаться только в том случае, когда он разрешен. Переход называется разрешенным, если каждая из его входных позиций имеет число фишек по крайней мере равное числу дуг из позиции в переход. Переход запускается удалением всех разрешающих фишек из его входных позиций и последующим перемещением в каждую из его выходных позиций по одной фишке для каждой дуги. Запуск перехода в целом заменяет маркировку m СП на новую маркировку m’.
Функционирование СП описывается формально с помощью множества последовательностей срабатывания переходов, из которой легко полу чается и последовательность маркировок-множество достижимых в сети разметок. Эти две последовательности представляют описание выполнения СП. Если СП описывает функциональную схему моделируемой системы, то работа сети моделирует процесс, происходящий при функционировании системы.
При имитационном моделировании топологической схемы и функционирования основного производства НПЗ с использованием СП, необходимо определение некоторых дополнительных условий и допущений для обычной СП.
При определении соответствия позиций и переходов СП технологическим объектам при имитационном моделировании, необходимо иметь ввиду, что представление процесса или системы сетью Петри основано на двух понятиях: событиях и условиях. События - это действия, имеющие место в системе. Возникновением событий управляет состояние системы. Состояние системы может быть описано условиями. Для того, чтобы событие произошло, необходимо выполнение соответствующих условий.
Поэтому технологические установки, процессы компаундирования, поступления сырья и других продуктов со стороны моделируются переходами; сырьевые, промежуточные и товарно-продуктовые резервуары-позициями. Дуги описывают материальные потоки.
Главными особенностями СП, делающими их очень удобными для имитации сложных систем, имеющих последовательно-паралелльную структуру, являются свойственные СП и их моделям одновременность и асинхронность. В ИМ на основе СП два разрешенных невзаимодействующих события могут происходить независимо друг от друга. Синхронизировать события, пока это не потребуется моделируемой системе, нет надобности. Но когда синхронизация необходима, моделировать ее легко.
Структура СП такова, что содержит в себе всю необходимую информацию для определения возможных последовательностей событий. Выполнение СП, отражающее поведение моделируемой непрерывной системы (НПЗ), можно рассматривать как последовательность дискретных событий. Порядок появления событий является одним из возможных, допускаемых основной структурой.
Названные особенности и возможность моделирования определяют отличия ИМ на базе СП от рассмотренной выше многостадийной сетевой ММ производства.
Технологическая схема НПЗ образует структуру с последовательно-параллельным соединением элементов (установок и резервуаров) и здесь возможно существование обратных связей. Для этих случаев принимается, что соответствующая позиция, введенная для отражения обратной связи, имеет постоянную фишку.
Выполнение СП начинается с запуска начальных переходов. Один цикл расчета, реализующий выполнение СП и представляющий собой последовательность маркированных состояний сети, моделирует работу НПЗ в течение суток.
При запуске переходов происходит расчет производства продуктов в соответствии с поступающей на вход перехода (установки) величины объема нагрузки и эти данные фиксируются. При маркировке позиции (резервуара) происходит расчет баланса, определение уровня в резервуаре и фиксацию этого уровня. В случае разбаланса, производится индикация критической ситуации и выдается сообщение ЛПР. Т.е. если в позиции р i есть фишка, то производится расчет баланса и при возникновении разбаланса, несмотря на наличие фишки в позиции и формальное разрешение на запуск следующего перехода на выходе позиции р i, он не запускается, а выдается информация ЛПР о возникновении критической ситуации или узкого места. Т.о. этот переход в данный
момент не срабатывает. После расчета баланса в позиции р i на вход tj подается количество продукта, соответствующее требуемой номинальной или плановой нагрузке на данном этапе расчета.
Однако, если даже в рi баланс соблюдается, но к подаче в tj готово количество продукта меньшее минимально допустимой нагрузки на эту установку, то в этом случае также не происходит активизация и запуск выходного перехода tj, т.е. фишка не передается дальше по сети. Вновь ЛПР выдается информация о возникновении узкого места. Во время выполнения сети каждый переход запускается один раз в цикле. Фишки задают такты и маркируют переходы, которые должны сработать, отражая последовательность переработки продуктов на объекте. Поэтому количество фишек на входе и выходе сети неодинаково.
Количественные и качественные показатели, характеризующие вырабатываемые объемы продуктов, коэффициенты отборов, нагрузки и
другие показатели фиксируются после каждого срабатывания.
При использовании ИМ на базе СП для прогнозирования производственных ситуаций для различных вариантов графика ремонтов, т.е. когда простаивают на ремонте те или иные установки, выполняется перенастройка модели, связанная с перенесением потоков (дуг)от одних объектов (узлов) к другим. Перенастройка происходит на основе предусмотренных возможных вариантов схем переориентации потоков.
Рассмотрим фрагмент технологического куста НПЗ, представленный графом СП (рис. 11.4). Рассматриваемые позиции, переходы и дуги представлены сплошными линиями и обозначены.
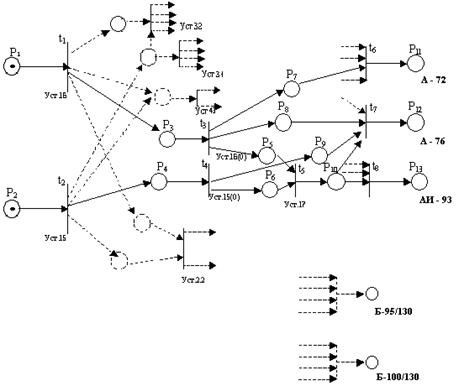
Рис.11.4 Технологический куст НПЗ, представленный графом сети Петри.
Структура сети определяется следующим образом:
Pn{p1,p2,…,pn}
Tn{t1,t2,…,tn}
I(t1)n{p1},O(t1) n{p3}; I{t2}n{p2}; O{t2}n{p4};
I(t3)n{p3},O(t3) n{p5,p6,p7}; I{t4}n{p4}; O{t4}n{p6,p9};
I(t5)n{p5,p6},O(t5) n{p10}; I{t6}n{p7}; O{t6}n{p11};
I(t7)n{p8,p9,p10},O(t7) n{p12}; I{t8}n{p10}; O{t8}n{p13};
Возможная траектория выполнения СП:
t1t2-t3t4-t5t6-t7t8
С помощью описанных выше принципов реализации ММ на базе СП можно моделировать работу как отдельных узлов или кустов технологического процесса, так и работу комплекса в целом. Это расширяет возможности ИМ и делает ее применимой, в частности, для решения задач диспетчеризации и оперативного управления, где необходимо получение прогнозов развития ситуаций и анализ вариантов решений в оперативные интервалы времени.
Дата добавления: 2018-10-26; просмотров: 172; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!