Выбор принципов и проектирование схемы управления насосной установки
 |
Согласно требованиям к насосным установкам, они должны быть максимально автоматизированы и работать без постоянного дежурства обслуживающего персонала.
Выполнение этого требования можно обеспечить лишь в случае применения системы автоматизированного управления. Данную систему целесообразно построить на базе программируемого контроллера, в функции которого входит анализ информации о состоянии объекта, поступающей с датчиков и выработка управляющих воздействий, а также выдача информации о ходе рабочего процесса на управляющую ЭВМ центрального диспетчерского пункта.
Выбор принципов управления насосной установкой произведем на основании требований к системе автоматизации (см. п.2.6). В соответствии с данными требованиями была разработана структурная схема автоматизации установки, изображенная на рис.8.1.
Структурная схема включает в себя два насоса (Н1 и Н2), сетевой трубопровод (СТ), преобразователь частоты с коммутационной аппаратурой (ПЧ), программируемый контроллер (ПК) и управляющую ЭВМ центрального диспетчерского пункта (ЭВМ).
На данной структурной схеме произведено разделение потоков информации, а именно: от контроллера к агрегатам насосной установки и обратно. Укажем, какую информацию должен получать контроллер, а какую передавать.
В процессе работы насосной установки необходимо осуществлять контроль следующих параметров:
- расхода жидкости через сетевой трубопровод;
- напора в сетевом трубопроводе;
- температуру жидкости в сетевом трубопроводе.
Следовательно, на контроллер должна поступать информация о расходе жидкости, напоре в сетевом трубопроводе, температуре жидкости, состоянии преобразователя и насосов (электродвигателей насосов). Контроллер же, в зависимости от расхода через сетевой трубопровод, должен подавать на преобразователь частоты сигнал задания на стабилизацию напора на необходимом уровне. Расчет необходимого напора, в зависимости от реального расхода, проводится по характеристикам сети.
Проанализировав схему силовых цепей насосной установки, приведенную на рис.5.2., можно сделать вывод, что для управления контакторами необходимо четыре дискретных выходных сигнала. Для управления преобразователем необходим один аналоговый выходной сигнал (напряжение задания напора).
Некоторое количество выходных дискретных сигналов необходимо для организации сигнализации режимов работы установки.
Для контроля состояния контакторов необходимо четыре дискретных входа и еще два необходимо для контроля исправности преобразователя и контроля необходимости включения дополнительного насоса. Для опроса датчиков необходимо два аналоговых входа.
Формализация условий работы установки
В процессе работы насосной установки необходимый напор в системе трубопроводов поддерживается за счет изменения скорости вращения насоса. Величина необходимого напора определяется по текущему расходу воды из сети.
Для определения расхода воды из сети воспользуемся следующим уравнением:
 , (8.1)
, (8.1)
где Q0 - расход воды, м3/с; a - коэффициент расхода о. е.; F0 - площадь отверстия сужающего устройства, м2; r - плотность воды в рабочих условиях, кг/м3; DР - перепад давления в сужающем устройстве, Н/м2.
Приведение расхода воды в нормальных условиях Q0 к расходу воды в нормальном состоянии QН выполняется по формуле:
 , (8.2)
, (8.2)
где QН - расход воды в нормальном состоянии, м3/с; Р - абсолютное давление воды перед сужающим устройством, Н/м2; РН - нормальное абсолютное давление воды, Н/м2; Т - температура воды перед сужающим устройством, °К; ТН - температура воды в нормальных условиях, ТН=293 °К; К - коэффициент сжимаемости воды.
На основании выражений (8.1) и (8.2) получим следующую формулу для расчета расхода воды в нормальном состоянии:
 , (8.3)
, (8.3)
где d - диаметр отверстия сужающего устройства, м.
В формуле (8.3) независимыми переменными являются DР, Р и Т. таким образом, выражение (8.3) можно легко упростить:
 , (8.4)
, (8.4)
где  .
.
В микропроцессорной системе, использующей операции только с целыми числами, измеряемые величины, после аналого-цифрового преобразования представлены в масштабе, определяемом количеством разряда слова данных. Введем следующие обозначения: DР2, Р2, Т2 - двоичные коды, пропорциональные, соответственно, перепаду давления, абсолютному давлению и температуре воды; DР2max, Р2max, Т2max - максимальные значения двоичных кодов целочисленных переменных, пропорциональных, соответственно, перепаду давления, абсолютному давлению и температуре воды; DРmax, Рmax, Тmax - ожидаемые максимальные значения, соответственно, перепада давления, абсолютного давления и температуры воды.
Тогда для независимых переменных DР, Р и Т справедливо следующее соотношение:
Хi = mi×Xi2, (8.5)
где Хi - независимая переменная; mi - масштаб независимой переменной, Xi2 - двоичный код, пропорциональный независимой переменной.
На основании формул (8.4) и (8.5) получим следующее соотношение для учета расхода воды:
 . (8.6)
. (8.6)
Мгновенное значение расхода воды можно также представить в целочисленном двоичном виде:
QH = mQ × QH2, (8.7)
где mQ - масштаб двоичного представления расхода сжатого воздуха.
Тогда в соответствии с (8.6) и (8.7) получим:
 , (8.8)
, (8.8)
где  .
.
С целью обеспечения расчета по формуле (8.8) при сохранении восьмиразрядного формата данных на всех этапах вычислений, целесообразно принять следующую последовательность выполнения арифметических операций:
1)  ;
;
2)  ;
;
3)  ;
;
4) × ;
5) × /  ;
;
6) К’’ × / .
Вычисления по формуле (8.8) для повышения достоверности вычислений необходимо проводить для усредненных на некотором интервале времени значений давления и температуры. Стандартная процедура усреднения выполняется по формуле:
 , (8.9)
, (8.9)
где Хi - мгновенное значение усредняемого параметра; N - количество значений, используемых для усреднения. Для вычисления числителя выражения (8.9) необходимо увеличивать разрядность слова данных, поэтому преобразуем его к виду:
 , (8.10)
, (8.10)
где Х1 - первое значение усредняемого параметра, DХi - отклонение i-го значения параметра от Х1 (DХi = Хi - Х1).
Алгоритм расчета и учета объемного расхода воды, а также определения необходимого для обеспечения вычисленного расхода воды напора в сети, составленный по уравнению (8.8) представлен на рис.8.2. Контроль напора и расхода воды осуществляют при помощи следующих датчиков: абсолютного давления (напор), разности давлений и температуры (расход).
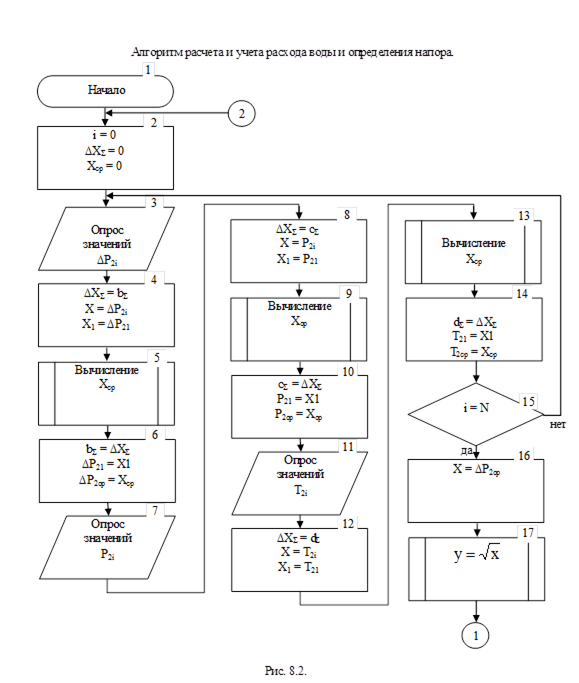



Поскольку, реализация приведенного алгоритма предполагается на контроллере типа МикроДАТ, не реализующем функцию корня квадратного, то вычисление корня квадратного организуем в подпрограмме, используя разложение этой функции в ряд.
Также в подпрограмме организуем вычисление среднего значения величины.
Алгоритмы подпрограмм для вычислений корня квадратного и среднего значения приведены на рис.8.3 и рис.8.4 соответственно.

При составлении схемы алгоритмов, представленных на рис.8.2-8.4 приняты следующие обозначения:
i - счетчик цикла опроса датчиков;
N - количество циклов опроса используемое для расчета средних значений;
Х, Х1, Хср, DХS - операнды подпрограммы вычисления среднего значения (Х - очередное значение измеряемого параметра, Х1 - первое в цикле значение измеряемого параметра, Хср - среднее значение измеряемого параметра, DХS - суммарное значение отклонений измеряемого параметра от Х1);
bS, сS, dS - суммарные значения отклонений от первого за цикл значения, соответственно, перепада давления, абсолютного давления и температуры;
DР2i, Р2i, Т2i - измеренное значение, соответственно, перепада давления, абсолютного давления и температуры;
DР21, Р21, Т21 - первое в цикле значение измеряемого параметра;
DР2ср, Р2ср, Т2ср - среднее за цикл измерения значение соответствующего параметра;
х, у - операнды подпрограммы вычисления корня квадратного, х - входное значение, у - результат;
у1, у2, у3 - промежуточные значения для вычисления расхода;
Q2ср - среднее за цикл измерения значение объемного расхода воды;
tj+1 - текущее время, соответствующее значению Q2ср;
tj - значение времени, соответствующее последнему зафиксированному значению расхода;
Q2j - последнее зафиксированное значение расхода;
Q2min - значение расхода воды, соответствующее нижнему пределу;
FQ - флаг минимального расхода;
FT - флаг начала суток;
S - счетчик суток.
Если по каким-либо причинам напор в сети не поддерживается на должном уровне, имеется возможность перейти на ручное управление электроприводом насоса, как с регулированием его скорости, так и без регулирования.
На основании анализа условий работы насосной установки можно сформулировать следующие требования, предъявляемые к системе управления:
1. Точное поддержание заданного оптимального напора в сети.
2. Программное управление приводами насосов.
3. Оперативный контроль, учет, отчетность, протоколирование процесса и диагностику работоспособности технических средств АСУ.
4. Использование средств дистанционного контроля и автоматического регулирования параметров сети.
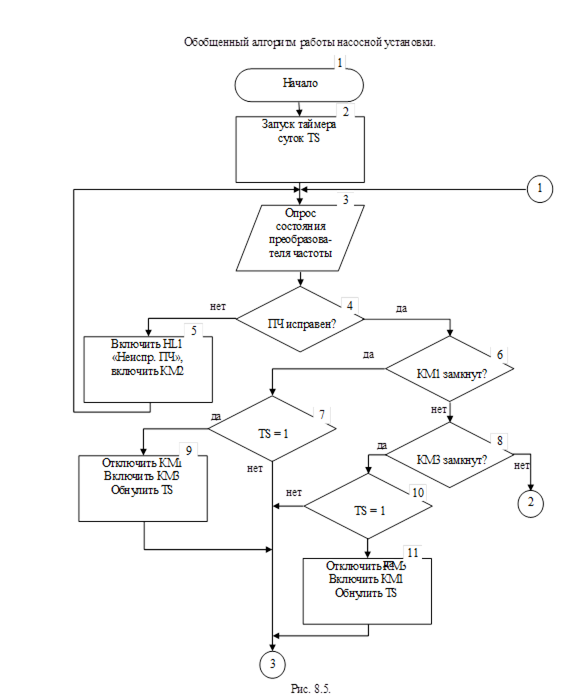

Обобщенный алгоритм работы насосной установки, составленный исходя из требований к системе управления насосной установкой и к системе автоматизации, с учетом разработанной силовой схемы (см. рис.5.1) представлен на рис.8.5 Алгоритм составлен в соответствии с процессом подачи воды потребителям, рассмотренным в разделе 1. При составлении алгоритма используются обозначения принятые на принципиальной схеме.
Выбор аппаратов
Для автоматизации работы насосной установки системы горячего водоснабжения применим контроллер типа МикроДАТ. Выбор данного контроллера обусловлен низкой ценой, широкой распространенностью данного оборудования в странах СНГ, простотой программирования и наладки, вполне удовлетворительным набором инструкций.
Микроконтроллер ГСП МикроДАТ МБ57.02 предназначен для комплектования отдельных узлов гибких производственных систем, агрегатных станков с количеством входов-выходов до 64.
Состав контроллера определяет потребитель по карте заказа изготовителя из списка изделий, приведенного ниже:
- каркас компоновочный МК10.13-02;
- источник электропитания МВ91.22;
- модуль микропроцессорный МС59.07;
- модуль ввода дискретных сигналов постоянного тока МС34.08-01;
- модуль ввода дискретных сигналов постоянного тока МС34.08-03;
- модуль ввода дискретных сигналов переменного тока МС34.09-01;
- модуль ввода дискретных сигналов переменного тока МС34.09-03;
- модуль вывода дискретных сигналов постоянного тока МС35.18-01;
- модуль вывода дискретных сигналов переменного тока МС35.25-01;
- модуль ввода непрерывных сигналов постоянного тока МС34.14-01;
- модуль вывода непрерывных сигналов постоянного тока МС32.09-01;
- модуль последовательного ввода-вывода МС52.26;
- расширитель интерфейса МС99.03-03.
Электрическое питание контроллера осуществляется от однофазной электрической сети с напряжением 220 В, частотой 50 Гц.
Потребляемая мощность - не более 80ВА.
Микроконтроллер содержит резервный источник питания (элемент типа А-316 "Квант" (2шт.)), обеспечивающий сохранение информации в ЭОЗУ при отключении электропитания. Время сохранения информации не менее 140 ч.
В соответствии с разработанным алгоритмом для создания системы автоматики на базе контроллера МикроДАТ выбираем следующие модули:
– модуль микропроцессорный МС59.07 предназначен для обработки, хранения информации и управления модулями ввода-вывода, технические характеристики:
1) объем памяти - 4К инструкций;
2) время выполнения логических операций - 7 мс/К инструкций;
3) максимальное количество дискретных каналов ввода-вывода - 256;
4) диапазон счета таймеров-счетчиков - 0-4095;
– модули ввода дискретных сигналов МС34.08-03 и МС34.09-03 (технические данные приведены в таблице 8.1);
– модуль вывода дискретных сигналов МС35.25-03 (технические данные приведены в таблице 8.1);
– модуль ввода аналоговых сигналов МС31.14, имеющий 8 каналов, с диапазоном изменения входных сигналов 0-10 В, 0-20 мА;
– модуль вывода аналоговых сигналов МС32.09, имеющий 2 канала, с диапазоном изменения выходных сигналов 0-10 В, 0-20 иА;
– модуль реального времени, предназначенный для обработки процессов реального времени, разработанный и изготовленный ГП НИПТИС, для реализации счетчика суток;
– согласователь интерфейсов МС52.25, для обмена информацией с управляющей ЭВМ (обмен информацией осуществляется с IBM-совместимыми ЭВМ при помощи предназначенной для этого программной среды "MEMOWORD", разработанной ГП НИПТИС).
Таблица 8.1.
Технические характеристики модулей ввода-вывода дискретных сигналов.
| Модуль | Род тока | Напряжение, В | Кол-во каналов | |
| Обозначение | Тип | |||
| МС34.08-03 | Ввод | Постоянный | 24 | 8 |
| МС34.09-03 | Ввод | Переменный | 220 | 8 |
| МС35.25-03 | Вывод | Переменный | 220 | 8 |
Для осуществления переключений в силовой части дискретные выходные сигналы контроллера подаются на схему через промежуточные реле типа РП-21МУХЛ4.
Для измерения требуемых параметров выбираем преобразователи измерительные, обеспечивающие линейную зависимость между изменением измеряемой величины и выходного сигнала, относящиеся к изделиям ГСП:
– абсолютного давления Сапфир-22М-ДА модель 2040;
– разности давлений Сапфир-22М-ДД модель 2440 с блоком извлечения корня БИК-1;
– температуры ТПХА-Б-1.01Г-02.200.
Дата добавления: 2018-10-25; просмотров: 572; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!