ЗАДАНИЕ 2. Измерить ускорение свободного падения при помощи физического маятника.
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РФ
ФЕДЕРАЛЬНОЕ ГОСУДАРСТВЕННОЕ БЮДЖЕТНОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ
ВЫСШЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ
«ВЯТСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ»
Электротехнический факультет
Кафедра физики
З.Г. Морозова
ОПРЕДЕЛЕНИЕ УСКОРЕНИЯ СВОБОДНОГО
ПАДЕНИЯ С ПОМОЩЬЮ МАТЕМАТИЧЕСКОГО
И ФИЗИЧЕСКОГО МАЯТНИКОВ
Учебно-методическое пособие
к лабораторной работе по дисциплине «Физика»
Киров 2015
УДК 513(07)
О 62
Рекомендовано к изданию методическим советом
электротехнического факультета ФГБОУ ВПО «ВятГУ»
Рецензент:
кандидат педагогических наук, доцент, кафедры «Прикладной математики и информатики» ФГБОУ ВПО «ВятГУ» Хохлова М. В.
Морозова З.Г.
| Определение ускорения свободного падения с помощью математического и физического маятников: учебно-методическое пособие к лабораторной работе по дисциплине «Физика» для студентов всех технических профилей подготовки, всех форм обучения / З.Г. Морозова. – Киров: Изд–во ВятГУ, 2015. –19с. |
© Морозова З.Г., 2015
© ФГБОУ ВПО «ВятГУ», 2015
Цель работы: изучение свойств гармонических колебаний на примере движения математического и физического маятников.
1. ГАРМОНИЧЕСКИЕ КОЛЕБАНИЯ И ИХ ХАРАКТЕРИСТИКИ
Периодически повторяющиеся процессы или движения называются колебаниями. Колебания называются свободными (или собственными), если они совершаются за счет первоначально сообщенной энергии и отсутствия внешних воздействий на колебательную систему в дальнейшем.
Простейшим типом свободных колебаний являются гармонические колебания. При гармонических колебаниях, независимо от природы возбуждения, изменение характерной величины S, происходит по закону косинуса или синуса:
S = A sin  ,
,
S = A cos , (1)
где А – амплитуда колебаний – максимальное значение величины S;  – круговая (циклическая) частота; – фаза колебаний;
– круговая (циклическая) частота; – фаза колебаний;  – начальная фаза колебаний.
– начальная фаза колебаний.
Амплитуда колебаний А является энергетической характеристикой процесса. Полная энергия колебательной системы пропорциональна квадрату амплитуды. Амплитуда гармонических колебаний не меняется со временем, т. е. и полная энергия колебательной системы в процессе гармонических колебаний меняться не будет.
Циклическая частота зависит от периода колебаний Т –  . Период Т определяется конструктивными особенностями устройства колебательной системы.
. Период Т определяется конструктивными особенностями устройства колебательной системы.
Фаза колебаний –  определяет смещение колеблющейся вели-
определяет смещение колеблющейся вели-
чины S(t) относительно положения равновесия в любой произвольный момент времени t.
Начальная фаза колебаний  – величина, определяющая смещение колеблющейся величины относительно положения равновесия в начальный момент времени S = S ( t 0 =0)= S 0 = A sin
– величина, определяющая смещение колеблющейся величины относительно положения равновесия в начальный момент времени S = S ( t 0 =0)= S 0 = A sin  .
.
Колебательные системы, совершающие механическое движение, называются маятниками. Для них величина S определяет X координату смещения маятника относительно положения равновесия.
Т.е уравнения (1) перепишутся:
X = X m cos или
X = X m sin , (2)
где X m – максимальное смещение от положения равновесия – амплитуда колебания.
Зависимость координаты от времени X ( t ) – формулы (2) можно рассматривать как уравнения движения маятника.
Если уравнение движения маятника X = X m cos ; тогда по определению мгновенная скорость и мгновенное ускорение маятника запишутся:
 (3)
(3)
 (4)
(4)
Из сравнения уравнений (3) и (4) с уравнением X ( t ) (2) следует, что и скоростьV ( t ) и ускорение a ( t), подобно координате X ( t ), со временем изменяются по гармоническому закону, но имеют смещения по фазе относительно X . Скорость  опережает X по фазе на p /2(в те моменты времени, когда X ( t) = 0, скорость V( t)= Vm -приобретает максимальное значение). Ускорение
опережает X по фазе на p /2(в те моменты времени, когда X ( t) = 0, скорость V( t)= Vm -приобретает максимальное значение). Ускорение  опережает X по фазе на p (в те моменты времени, когда
опережает X по фазе на p (в те моменты времени, когда
X (t) = Xm – принимает максимальное положительное значение , ускорение
a ( t )= - a m приобретает максимальное отрицательное значение ).
Из уравнения (3) амплитудное (максимальное) значение скорости равно  , из уравнения (4) – амплитудное значение ускорения
, из уравнения (4) – амплитудное значение ускорения  .
.
Из сравнения уравнений для координаты –(2) и для ускорения – (4) следует:
 (5)
(5)
Сила, действующая на колебательную систему, определяется по второму
закону Ньютона с учетом (5) выражением:
 , (6)
, (6)
где m- масса колебательной системы, k = m  -постоянный для этой системы коэффициент.
-постоянный для этой системы коэффициент.
Данная сила F подобна силе упругости, пропорциональна смещению X и направлена в противоположную сторону смещению. В общем случае эта сила F называется квазиупругой силой, а коэффициент k- коэффициентом квазиупругой силы.
Из уравнения (6) после определенных математических преобразований следует:
 ,
,
где  =
=  собственная частота колебаний маятника).
собственная частота колебаний маятника).
Полученное дифференциальное уравнение (8) называется дифференциальным уравнением механических гармонических колебаний:
 (8)
(8)
Решением этого дифференциального уравнения являются функции вида (2).
В общем виде при X = S уравнение (8) принимает вид (9)
 (9)
(9)
Решением уравнения (9), является функции вида (1), а будет собственной частотой соответствующей колебательной системы.
Для гармонических механических колебаний характерно постоянство величины полной механической энергии системы (отсутствие затухания) и переход энергии в процессе движения из одного вида в другой и обратно без потерь
Для случая механического движения кинетическая энергия K определяется выражением:
 . (10)
. (10)
Потенциальная энергия П по определению с учетом (7) запишется: 
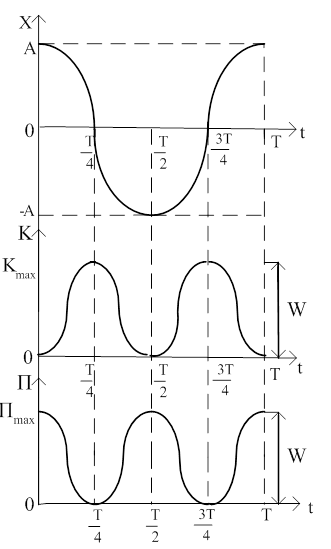
Рис.1
Полная энергия механическая энергия W равнасумме кинетической и потенциальной энергии и с учетом уравнений (10) и (11) определяется выражением и не меняется в процессе колебаний:
 . (12)
. (12)
На рис. 1 представлены зависимости координаты X( t ), кинетической энергии К( t ), потенциально энергии П( t ) и полной энергии W ( t ) от времени. гии П( t ) и полной энергии W ( t ) от времени.
Из формул (10) и (11) и рис.1 следует, что и кинетическая и потенциальная энергия маятника изменяются с частотой, в два раза превышающей частоту соответствующего гармонического колебания X(t).
Кинетическая и потенциальная энергия имеют сдвиг по фазе на p , т.е. в момент, когда кинетическая энергия достигает максимума потенциальная энергия имеет минимум.
2. МАТЕМАТИЧЕСКИЙ МАЯТНИК
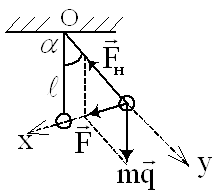
Математическим маятником называется идеализированная система, состоящая из материальной точки m, подвешенной на невесомой нерастяжимой нити  , и колеблющаяся под действием веса материальной точки. В положении рав
, и колеблющаяся под действием веса материальной точки. В положении рав
новесия, если точка О – точка подвеса маятника, Рис.2
неподвижна или движется с постоянной скоростью, вес тела численно равен силе тяжести.
На рис. 2 представлен математический маятник, для которого отклонение от положения равновесия a - мало. Основной закон динамики поступательного движения для маятника запишется:
 , (13)
, (13)
в проекциях на Х и У уравнение (13) будет иметь вид:
 (14)
(14)
Ускорение  маятнику создает результирующая сила
маятнику создает результирующая сила  , направленная к положению равновесия (возвращающая сила). Из треугольника сил (Рис.2) следует, что величина силы
, направленная к положению равновесия (возвращающая сила). Из треугольника сил (Рис.2) следует, что величина силы  , причем для малых
, причем для малых  -
-  .
.
Тогда дифференциальное уравнение гармонических колебаний запишется:
 . (15)
. (15)
Сравнивая его с (8), получим, что собственная циклическая частота определится  , а период колебаний математического маятника запишется:
, а период колебаний математического маятника запишется:
 . (16)
. (16)
3. ФИЗИЧЕСКИЙ МАЯТНИК
Физический маятник – это твердое тело, совершающее под действием силы тяжести колебания вокруг горизонтальной неподвижной оси О, не проходящей через центр масс С (рис. 3).
Пусть маятник, отклоненный от положения равновесия на некоторый угол  ( -мало), совершает вращательное движение под действием возвращающей
( -мало), совершает вращательное движение под действием возвращающей
силы Fx. В соответствии с основным уравнением динамики вращательного движения твердого тела момент возвращающей силы М определится:
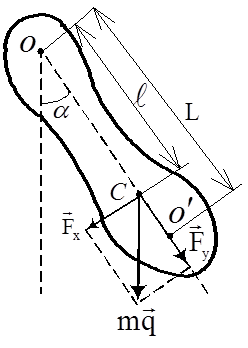
 , (17) где I – момент инерции тела; e – угловое ус Рис.3 корение; d – плечо силы F х.
, (17) где I – момент инерции тела; e – угловое ус Рис.3 корение; d – плечо силы F х.
Учитывая рис. 3, d =  – расстоянию от
– расстоянию от
Рис.3 оси вращения О до центра масс тела С,
 - возвращающаяся сила для данного маятника.
- возвращающаяся сила для данного маятника.
Таким образом уравнение (13) перепишется
или  (18)
(18)
С учетом малых 

или  . (19)
. (19)
Из сравнения уравнения (19) с уравнением (8) циклическая частота  физического маятника определится:
физического маятника определится:
 ,
,
тогда период колебаний физического маятника равен:
 . (20)
. (20)
Величина  – называется приведенной длиной физического маятника.
– называется приведенной длиной физического маятника.
Эта величина зависит от формы, размеров тела, положения оси вращения О относительно центра масс тела С.
Момент инерции маятника относительно оси вращения О определяется по теореме Штейнера  , следовательно, приведенная длина физического маятника запишется:
, следовательно, приведенная длина физического маятника запишется:
 ,
,
т.е. L больше расстояния ОС =  и равна расстоянию между двумя точками тела О и
и равна расстоянию между двумя точками тела О и  . Точка – называется центром качания тела для оси О. Если ось подвеса перенести из точки О в соответствующий ей центр качания
. Точка – называется центром качания тела для оси О. Если ось подвеса перенести из точки О в соответствующий ей центр качания  , то период колебаний тела не изменится, т.е. О и обладают свойством взаимозаменяемости.
, то период колебаний тела не изменится, т.е. О и обладают свойством взаимозаменяемости.
Также приведенную длину физического маятника L можно определить как длину математического маятника , колеблющегося синхронно с данным физическим маятником.
ТЕХНИКА БЕЗОПАСТНОСТИ
1. К проведению работ допускаются лица, прошедшие инструктаж по технике безопасности.
2. При выполнении работы необходимо соблюдать меры предосторожности при работе с физическим маятником и математическим маятниками.
ПОРЯДОК ВЫПОЛНЕНИЯ РАБОТЫ
Используя математический и физический маятники, необходимо определить ускорение свободного падения для данной местности.
ЗАДАНИЕ 1. Измерить ускорение свободного падения при помощи математического маятника.
Описание установки
Из формулы (16) получим:
 . (21)
. (21)
Из определения периода колебаний:
 , (22)
, (22)
где t – время, за которое совершается n колебаний.
1). Задавшись определенным значением точности расчета g -  , вычислить количество колебаний n, которое необходимо провести для получения результата с заданной точностью.
, вычислить количество колебаний n, которое необходимо провести для получения результата с заданной точностью.
Измерение g является косвенным измерением. Для получения формулы для расчета ошибки косвенного измерения надо проделать следующие преобразования формулы (19):
1) прологарифмировать формулу по основанию натурального логарифма:
 ;
;
2) полученную формулу продифференцировать:
 ;
;
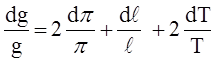
3) перейти к конечным изменениям величин, входящих в формулу:
 . (23)
. (23)
Обычно погрешность  в лабораторных измерениях берется
в лабораторных измерениях берется  . Ошибка измерения длины математического маятника
. Ошибка измерения длины математического маятника  равна точности измерения применяемого для этого прибора.
равна точности измерения применяемого для этого прибора.
Из формулы (23) следует, что точность измерения ускорения свободного падения зависит от точности измерения периода колебаний математического маятника  .
.
Тогда из формулы (23)следует
 . (24)
. (24)
Из определения периода колебаний (22) и предположения, что Т также является косвенным измерением, получим:
 . (25)
. (25)
Пренебрегая  и с учетом (24) и (25), получим:
и с учетом (24) и (25), получим:
 , (26)
, (26)
где  – ошибка секундомера, равная цене деления секундомера. Из формулы (26) можно рассчитать время t, необходимое для получения заданной точности измерения ускорения свободного падения g . Однако, при проведении экспе
– ошибка секундомера, равная цене деления секундомера. Из формулы (26) можно рассчитать время t, необходимое для получения заданной точности измерения ускорения свободного падения g . Однако, при проведении экспе
римента, лучше измерять не время колебаний t, а число колебаний n, происходящих за это время. Для нахождения n используют формулу (22), в которую вместо Т подставляют предварительно найденный период колебаний маятника Тпр и рассчитанное из формулы (26) время t.
Необходимо, однако, привести некоторые соображения по поводу оценки погрешности и точности определения величины ускорения свободного падения с помощью данного маятника.
Считая, что период колебаний маятника определяется формулой (22), мы пренебрегаем зависимостью периода от амплитуды и неизбежным нарушением требований, вытекающих из определения математического маятника. Это влечет за собой следующие неточности:
I. Строго говоря, период колебаний зависит от амплитуды колебаний:
 . (27)
. (27)
Такое выражение для периода колебаний следует из решения уравнения (16).
В нашей работе мы пренебрегаем членами, содержащими амплитуду колебаний, следствием чего является погрешность  в определении g. Из формулы (23) найдем ускорение свободного падения:
в определении g. Из формулы (23) найдем ускорение свободного падения:
 . (28)
. (28)
Погрешность  найдем как разность между более точным значением, которое дается формулой (26) и приближенным, которое дается формулой (19):
найдем как разность между более точным значением, которое дается формулой (26) и приближенным, которое дается формулой (19):
 ;
;
 , (29)
, (29)
где А выражено в радианах.
II. Конечность размеров шарика, наличие в нем отверстия, весомость нити и наличие узелка на ее конце приводят к тому, что данный маятник не является строго математическим, поэтому для расчета ускорения свободного падения нужно пользоваться формулой (18), а не формулой (15). Использование формулы (19) для расчета g без учета отличия параметров нашего маятника от идеального математического маятника приводит к появлению погрешности  . Значение
. Значение  рассчитывается из формулы (20), а
рассчитывается из формулы (20), а  – из формулы (16):
– из формулы (16):
 .
.
 . (30)
. (30)
III. В результате растяжимости нити допускается погрешность
 , (31)
, (31)
где  – удлинение нити, вызванное действием максимальной центробежной силы в момент прохождения положения равновесия.
– удлинение нити, вызванное действием максимальной центробежной силы в момент прохождения положения равновесия.
Однако в нашей установке погрешности (29), (30), (31) невелики. Например,  для
для  = 100 см, то есть на порядок меньше погрешностей величин, входящих в формулу (22). При малых колебаниях
= 100 см, то есть на порядок меньше погрешностей величин, входящих в формулу (22). При малых колебаниях  величина
величина  еще меньше. Поэтому погрешностям (29), (30), (31) можно пренебречь, если амплитуда
еще меньше. Поэтому погрешностям (29), (30), (31) можно пренебречь, если амплитуда
колебаний будет порядка  .
.
Порядок выполнения задания 1
1. Рассчитать из соотношения (26) время t опыта.
2. Привести маятник в колебательное движение и замерить время пяти полных колебаний t 5, рассчитать по формуле (22) предварительный период T пр.
3. Рассчитать число колебаний n, которые произойдут за время t , рассчитанное из формулы(26). Для этого в формулу (22) подставить рассчитанное из формулы (26) время t и период Тпр, рассчитанный в пункте 2. Результат расчета n округлить в большую сторону.
4. Привести маятник в колебательное движение измерить время n колебаний, рассчитанных в пункте 3.
5. Точно рассчитать период Т колебаний математического маятника по формуле(16), используя результаты, полученные в пункте 3.
6. Вычислить ускорение свободного падения g по формуле (21), подставляя в нее период, рассчитанный в пункте 5.
7. Определить погрешность измерения g по формуле (23).
8. Сравнить полученную точность измерения g с заданной точностью.
9. Записать окончательный результат и сравнить его с табличным значением g .
ЗАДАНИЕ 2. Измерить ускорение свободного падения при помощи физического маятника.
Описание установки
Исходя из формулы (20), ускорение свободного падения 
запишется.
 (32)
(32)
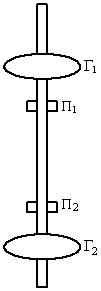
Определение ускорения свободного падения в этом задании производится с помощью оборотного физического маятника (рис. 4). Оборотный маятник представляет собой металлический стержень с двумя параллельными друг другу опорными Рис.4
призмами П1 и П2, за которые он может поочередно подвеши-
ваться на кронштейне, а также с двумя грузами Г1 и Г2 в виде чечевицы. В нашей установке опорные призмы П1, П2 и груз Г2 жестко закреплены на стержне, второй груз Г1 может перемещаться. Конец стержня, по которому перемещается груз Г1 имеет шкалу с миллиметровыми делениями. При перемещении груза Г1 по стержню меняется конфигурация физического маятника. При определенном положении груза Г1, соответствующем некоторому определенному отсчету его координаты  по шкале, заданное расстояние между призмами П1 и П2 будет равно приведенной длине
по шкале, заданное расстояние между призмами П1 и П2 будет равно приведенной длине  данного физического маятника.
данного физического маятника.
Тогда периоды колебаний Т1 и Т2 маятника при укреплении его в кронштейне на призмах П1 и П2 , соответственно, будут одинаковы.
Порядок выполнения задания 2
1. Закрепить подвижный груз Г1 на шкале в некотором положении (по указанию преподавателя).
2. Измерить время, за которое совершается 20 полных колебаний относительно оси, проходящей через призму П1.
3. Перевернув маятник, измерить время t 2, 20 полных колебаний относительно оси, проходящей через призмуП2.
4. Перемещая груз Г1 по шкале с некоторым шагом (согласно указанию преподавателя), повторить указанные во 2 и 3 пунктах измерения для 10-12 положений груза на шкале.
5. Результаты измерений (положение  груза на шкале, время t 1 и t 2, число колебаний n) занести в таблицу.
груза на шкале, время t 1 и t 2, число колебаний n) занести в таблицу.
 (см) (см)
| t 1 (с) | t 2 (с) | Т1 (с) | Т2 (с) |
6. Рассчитать периоды Т1 и Т2 колебаний маятника относительно осей П1 и П2 для всех положений груза.
7. На одном графике построить зависимости периодов  и
и
 . от положения груза Г1 на шкале.
. от положения груза Г1 на шкале.
8. Найти точку пересечения кривых. Она соответствует тому положению 
груза Г1, при котором периоды колебаний Т1 и Т2 совпадают, т.е. расстояние
между призмами равно приведенной длине  физического маятника.
физического маятника.
9. Укрепить груз Г1 в положении и определить наиболее точно периоды
колебаний Т1 и Т2 в прямом и перевернутом положениях маятника. Найти
среднее значение периода Т.
10. Измерить расстояние между опорными призмами, равное приведенной дли-
не  физического маятника.
физического маятника.
11. Рассчитать ускорение свободного падения по формуле (32).
12. Определить погрешность измерения ускорения свободного падения по фор-
муле (23), приняв  .
.
13. Записать окончательный результат g и сравнить его с табличным значени-
ем ускорения свободного падения.
КОНТРОЛЬНЫЕ ВОПРОСЫ
1. Какое колебание называется гармоническим? Запишите уравнение механических гармонических колебаний.
2. Получите уравнения для скорости и ускорения гармонических механических колебаний.
3. Выведите дифференциальное уравнение механических гармонических колебаний физического маятника..
4. Объясните характер изменения энергии колебательной системы при совершении гармонических колебаний.
5. Дайте определение физического и математического маятников. Как рассчитывается их период колебаний?
6. Что называется приведенной длиной физического маятника?
7. В чем состоит свойство обратимости физического маятника? Как оно используется в данной работе?
8. Обоснуйте точность определения величины ускорения свободного падения.
9. Почему не следует определять период колебаний математического маятника на основе измерения времени 3-5 колебаний.
10. Математический маятник длиной  =40см и физический маятник в виде тонкого прямого стержня длиной
=40см и физический маятник в виде тонкого прямого стержня длиной  =60см синхронно колеблются около одной и той же горизонтальной оси. Определить расстояние d центра масс стержня от оси колебаний.
=60см синхронно колеблются около одной и той же горизонтальной оси. Определить расстояние d центра масс стержня от оси колебаний.
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
1. Трофимова, Т. И. Курс физики [Текст] : учеб. пособие / Т. И. Трофимова. - М. : Академия, 2007. – 560 с.
2. Детлаф, А. А. Курс физики [Текст ] : учеб. пособие / А. А. Детлаф, В. М. Яворский. - М. : Академия, 2007. - 720 с.
3. Савельев, И. В. Курс физики [Текст] / И. В. Савельев; под ред. И. В. Савельева. - М. : КноРус 2009. – В 4 т. Т. 2. Электричество и магнетизм. - 2009. - 570 с.
Дата добавления: 2018-10-25; просмотров: 547; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!