Недозагрузка электродвигателей переменного тока
При недозагрузке электродвигателя потребляемая им активная мощность уменьшается пропорционально нагрузке. В то же время реактивная мощность изменяется меньше. Поэтому чем меньше нагрузка двигателя, тем с меньшим коэффициентом мощности он работает.
Так, например, асинхронный двигатель в 400 кВт при 1000 оборотах в минуту имеет "косинус фи", равный при полной нагрузке 0,83. При ¾ нагрузки тот же двигатель имеет cos φ = 0,8. При ½ нагрузке cos φ = 0,7 и при ¼ нагрузки cos φ = 0,5.
Двигатели, работающие вхолостую, имеют "косинус фи", равный от 0,1 до 0,3 в зависимости от типа, мощности и скорости вращения.
Неправильный выбор типа электродвигателя
Двигатели быстроходные и большой мощности имеют более высокий "косинус фи", чем тихоходные и маломощные двигатели. Двигатели закрытого типа имеют cos φ ниже, чем двигатели открытого типа. Двигатели, неправильно выбранные по типу, мощности и скорости, понижают cos φ.
Повышение напряжения в сети
В часы малых нагрузок, обеденных перерывов и тому подобного напряжение сети на предприятии увеличивается на несколько вольт. Это ведет к увеличению намагничивающего тока индивидуальных потребителей (реактивной составляющей их полного тока), что в свою очередь вызывает уменьшение cos φ предприятия.
Неправильный ремонт двигателя
При перемотке электродвигателей обмотчики вследствие неправильного подбора проводов иногда не заполняют пазы машины тем количеством проводников, которое было в фабричной обмотке. При работе такого двигателя, вышедшего из ремонта, увеличивается магнитный поток рассеяния, что приводит к уменьшению cos φ двигателя.
|
|
|
При сильном износе подшипников ротор двигателя может задевать при вращении за статор. Вместо того чтобы сменить подшипники, обслуживающий персонал иногда идет по неправильному и вредному пути и подвергает ротор обточке.
Увеличение воздушного зазора между ротором и статором вызывает увеличение намагничивающего тока и уменьшение cos φ двигателя.
Способы увеличения "косинуса фи"
Вышеперечисленные последствия низкого cos φ с достаточной убедительностью говорят о том, что необходимо вести борьбу за высокий cos φ.
К мерам увеличения cos φ относятся:
1. Правильный выбор типа, мощности и скорости вновь устанавливаемых двигателей;
2. Увеличение загрузки двигателей;
3. Недопущение работы двигателей вхолостую продолжительное время;
4. Правильный и высококачественный ремонт двигателей;
5. Применение статических (то есть неподвижных, невращающихся) конденсаторов.
Малый вес конденсаторов, отсутствие вращающихся частей, незначительные потери энергии в них, легкость обслуживания, безопасность и надежность в работе дают возможность широкого применения статических конденсаторов для повышения cos φ двигателей.
|
|
|
Подбирая величину емкости при параллельном соединении и емкости, можно добиться уменьшения угла сдвига фаз между напряжением и общим током при неизменной активной и реактивной мощности, потребляемой ветвью с индуктивностью. Этот угол можно сделать равным нулю. Тогда ток, текущий на общем участке цепи, будет иметь наименьшую величину и совпадать по фазе с напряжением сети.
Это явление называется компенсацией сдвига фаз и широко используется на практике.
По экономическим соображениям невыгодно доводить угол φ до нуля, практически целесообразно иметь cos φ = 0,9 – 0,95.
Способы регулирования скорости двигателя постоянного тока независимого возбуждения.
 Из уравнения электромеханической характеристики двигателя постоянного тока независимого возбуждения следует, что возможны три способа регулирования его угловой скорости:
Из уравнения электромеханической характеристики двигателя постоянного тока независимого возбуждения следует, что возможны три способа регулирования его угловой скорости: 
1) регулирование за счет изменения величины сопротивления реостата в цепи якоря,
2) регулирование за счет изменения потока возбуждения двигателя Ф,
|
|
|
3) регулирование за счет изменения подводимого к обмотке якоря двигателя напряжения U. Ток в цепи якоря Iя и момент М, развиваемый двигателем, зависят только от величины нагрузки на его валу.
Рассмотрим первый способ регулирования скорости двигателя постоянного тока изменением сопротивления в цепи якоря. Схема включения двигателя для этого случая представлена на рис. 1, а электромеханические и механические характеристики — на рис. 2, а.

Рис. 1. Схема включения двигателя постоянного тока независимого возбуждения
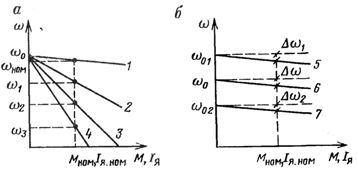
Рис. 2. Механические характеристики двигателя постоянного тока при различных сопротивлениях цепи якоря (а) и напряжениях (б)
Изменяя сопротивление реостата в цепи якоря можно получить при номинальной нагрузке различные угловые скорости электродвигателя на искусственных характеристиках — ω1, ω2, ω3.
Проведем анализ данного способа регулирования угловой скорости двигателей постоянного тока с помощью основных технико-экономических показателей. Так как при данном способе регулирования изменяется жесткость характеристик в широких пределах, то при скоростях менее половины номинальной стабильность работы двигателя резко ухудшается. По этой причине диапазон регулирования скорости ограничен (D= 2- З).
|
|
|
Скорость при данном способе можно регулировать в сторону уменьшения от основной, о чем свидетельствуют электромеханические и механические характеристики. Высокую плавность регулирования трудно обеспечить, так как потребовалось бы значительное количество ступеней регулирования и соответственно большое число контакторов. Полное использование двигателя по току (нагреву) в этом случае достигается при регулировании с постоянным моментом нагрузки.
Недостатком рассматриваемого способа является наличие значительных потерь мощности при регулировании, которые пропорциональны относительному изменению угловой скорости. Достоинством рассмотренного способа регулирования угловой скорости являются простота и надежность схемы управления.
Учитывая большие потери в реостате при малых скоростях, данный способ регулирования скорости применяется для приводов с кратковременным и повторно-кратковременным режимами работы.
 При втором способе регулирование угловой скорости двигателей постоянного тока независимого возбуждения осуществляется изменением величины магнитного потока за счет введения в цепь обмотки возбуждения дополнительного реостата. При ослаблении потока угловая скорость двигателя как при нагрузке, так и при холостом ходе возрастает, а при усилении потока — уменьшается. Практически возможно изменение скорости только в сторону увеличения ввиду насыщения двигателя.
При втором способе регулирование угловой скорости двигателей постоянного тока независимого возбуждения осуществляется изменением величины магнитного потока за счет введения в цепь обмотки возбуждения дополнительного реостата. При ослаблении потока угловая скорость двигателя как при нагрузке, так и при холостом ходе возрастает, а при усилении потока — уменьшается. Практически возможно изменение скорости только в сторону увеличения ввиду насыщения двигателя.
При увеличении скорости ослаблением потока допустимый момент двигателя постоянного тока изменяется по закону гиперболы, а мощность остается постоянной. Диапазон регулирования скорости для данного способа D = 2 - 4.
Механические характеристики для различных значений потока двигателя приведены на рис. 2, а и 2, б, из которых видно, что характеристики в пределах номинального тока имеют высокую степень жесткости.
Обмотки возбуждения двигателей постоянного тока независимого возбуждения обладают значительной индуктивностью. Поэтому при ступенчатом изменении сопротивления реостата в цепи обмотки возбуждения ток, а следовательно, и поток будут изменяться по экспоненциальному закону. В связи с этим регулирование угловой скорости будет осуществляться плавно.
Существенными преимуществами данного способа регулирования скорости являются его простота и высокая экономичность.
Данный способ регулирования используют в приводах в качестве вспомогательного, обеспечивающего повышение скорости при холостом ходе механизма.
Третий способ регулирования скорости заключается в изменении напряжения, подводимого к обмотке якоря двигателя. Угловая скорость двигателя постоянного тока независимо от нагрузки изменяется прямо пропорционально напряжению, подводимому к якорю. Поскольку все регулировочные характеристики являются жесткими, а степень их жесткости остается для всех характеристик неизменной, работа двигателя является стабильной на всех угловых скоростях и, следовательно, обеспечивается широкий диапазон регулирования скорости независимо от нагрузки. Этот диапазон равен 10 и может быть расширен за счет специальных схем управления.
При данном способе угловую скорость можно уменьшать и увеличивать относительно основной. Повышение скорости ограничено возможностями источника энергии с регулируемым напряжением и Uном двигателя.
Если источник энергии обеспечивает возможность непрерывного изменения подводимого к двигателю напряжения, то регулирование скорости двигателя будет плавным.
Данный способ регулирования является экономичным, так-так регулирование угловой скорости двигателя постоянного тока независимого возбуждения осуществляется без дополнительных потерь мощности в силовой цепи якоря. По всем перечисленным выше показателям данный способ регулирования по сравнению с первым и вторым наилучший.
Дата добавления: 2018-08-06; просмотров: 1087; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!