Определение аналитическим методом пусковые сопротивления
РАСЧЕТ И ПОСТРОЕНИЕ ЕСТЕСТВЕННЫХ И ИСКУССТВЕННЫХ ХАРАКТЕРИСТИК ДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА НЕЗАВИСИМОГО ВОЗБУЖДЕНИЯ
Для электродвигателя постоянного тока независимого возбуждения рассчитать и построить:
1. Естественные механическую  и электромеханическую характеристики
и электромеханическую характеристики  .
.
2. Искусственные механические характеристики:
• при напряжении на якоре  ,
,  , номинальном магнитном потоке и отсутствии дополнительного сопротивления
, номинальном магнитном потоке и отсутствии дополнительного сопротивления  в цепи якоря;
в цепи якоря;
• при сопротивлении цепи якоря  ,
,  , номинальном напряжении и номинальном магнитном потоке;
, номинальном напряжении и номинальном магнитном потоке;
• при магнитном потоке  ,
,  , номинальном напряжении и отсутствии дополнительного сопротивления
, номинальном напряжении и отсутствии дополнительного сопротивления  в цепи якоря.
в цепи якоря.
3. Определить аналитическим методом пусковые сопротивления.
4. Определенить сопротивления резистора  для динамического торможения
для динамического торможения
Естественные механическую и электромеханическую характеристики
Расчет и построение механических характеристик электродвигателя следует начать с построения естественной механической характеристики, которая представляет собой прямую линию, проходящую через точки: с координатами М0, ω0, (режим идеального холостого хода) и Мн, ωн (номинальный режим работы).
Исследование статических и динамических характеристик в одномассовой электромеханической системе с двигателем постоянного тока независимого возбуждения
Двигатель постоянного тока независимого возбуждения подключен по схеме, приведенной на рис. 1.1.
|
|
|
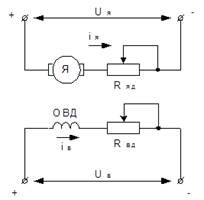
Рисунок 1.1-Двигатель постоянного тока независимого возбуждения
Номинальная частота вращения 9

Определение единого электромагнитного коэффициента:

Номинальный электромагнитный момент:


Номинальный момент на валу двигателя:

Момент потерь:


Полный момент сопротивления:

Ток якоря, соответствующий моменту сопротивления Мс:

Частота вращения двигателя при токе Ic:
Угловая скорость реального холостого хода:

 =125,46с-1
=125,46с-1
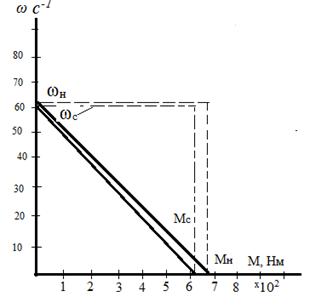
Рисунок 1.2- Естественные механическую
Искусственные механические характеристики
1) при сопротивлении цепи якоря  ,
,  номинальном напряжении и номинальном магнитном потоке;
номинальном напряжении и номинальном магнитном потоке;
Координаты точек искусственных характеристик:
 ;
;


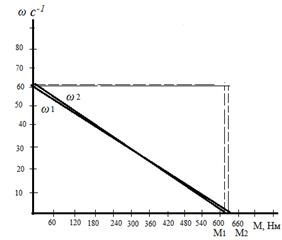
Рисунок 1.3- Искусственные механические характеристики при сопротивлении цепи якоря ,
2) при напряжении на якоре  ,
,  , номинальном магнитном потоке и отсутствии дополнительного сопротивления в цепи якоря. Угловая скорость идеального холостого хода при напряжении:
, номинальном магнитном потоке и отсутствии дополнительного сопротивления в цепи якоря. Угловая скорость идеального холостого хода при напряжении:

|
|
|
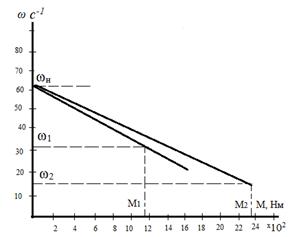
Рисунок 1.4- Искусственные механические характеристики при напряжении на якоре ,
3) при магнитном потоке , , номинальном напряжении и отсутствии дополнительного сопротивления в цепи якоря.
Угловая скорость:
 102
102


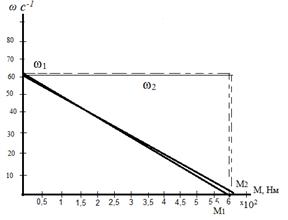
Рисунок 1.5 - Искусственные механические характеристики при магнитном потоке ,
Определение аналитическим методом пусковые сопротивления
Определение число пусковых ступеней:

Если число ступеней получается дробным, то его округлить до целого числа и найти новое значение
В соответствии с требованиями механизма выбрать пределы изменения тока при пуске:

Определение общих сопротивлений цепи якоря при полностью включенном пусковом сопротивлении:

где  и
и  .
.
 ;
; 
Итак, число ступеней пуска m=2. Это означает, что в электрической схеме пуска будет два добавочных сопротивления  (рис. 1.6), значения которых определяются при дальнейших расчетах.
(рис. 1.6), значения которых определяются при дальнейших расчетах.
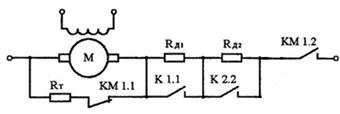
Рисунок 1.6- Часть принципиальной электрической схемы пуска и динамического торможения ДПТ
При динамическом торможения обмотка якоря отключается от сети и закорачивается одним резистором  , значение которого так же определим в подразделе (1.4).
, значение которого так же определим в подразделе (1.4).
|
|
|
Для естественной характеристики (нулевая ступень) ДПТ независимого возбуждения полное сопротивление якорной цепи  равно сопротивлению якорной обмотки R.
равно сопротивлению якорной обмотки R.
На основании вышесказанного определим значения резисторов  .
.
Определение значения сопротивлений ступеней пускового реостата:

На первой ступени:
где  -добавочное сопротивление определяется так:
-добавочное сопротивление определяется так:

 =3,38Ом
=3,38Ом

На второй ступени:


 ,
,
 .
.
Выполнение проверочного расчета. Общее сопротивление цепи якоря при пуске равно:


Проверка:  ,
, 

Рисунок 1.7- Электромеханическая характеристика
ДПТ (для 2 ступеней пуска)
Дата добавления: 2018-06-27; просмотров: 699; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!