ДОСЛІДЖЕННЯ ДИНАМІКИ ЕЛЕКТРОПРИВОДА
Вибірструктури САК ЕП, складанняпередаточнихфункцій
Отримання достовірних якісних і особливо кількісних характеристик поведінки реальної системи автоматизованого електроприводу конкретного виробничого механізму вимагає максимального врахування особливостей роботи, як в цілому електроприводу, так і його окремих елементів. Перш за все врахування всіх особливостей роботи перетворювача частоти та системи електроприводу, параметрів електричних та механічних систем, що залежать від часу та інших параметрів.
Таблиця 3.1
Номінальні дані двигуна типу АР 355SMC12
| Uфн, В | f, Гц | Рн, кВт | nн, об/хв | Jдв, кг·м2 | ή, % | cosφ | r1* | x1* | r2'* | x2'* | xμ* |
| 380 | 50 | 57 | 491 | 12,4 | 94,1 | 0,71 | 0,028 | 0,1 | 0,026 | 0,14 | 2 |
Примітка*: параметри активних та індуктивних опорів наведені у відносних одиницях.
При дослідженні частотного управління двигуном, більш доцільно представити АД у вигляді такої структурної схеми:
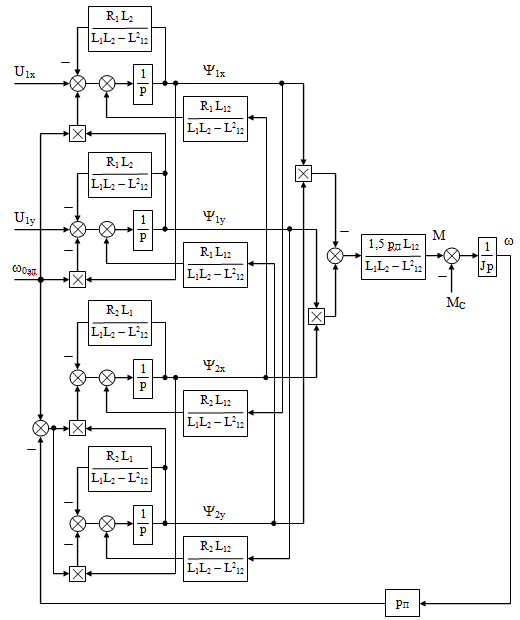 Рисунок 3.2 Структурна схема моделі асинхронного двигуна
Рисунок 3.2 Структурна схема моделі асинхронного двигуна
У такому разі схема системи керування при пуску від задавача інтенсивності ЗІ та реактивному моменті опору матиме вигляд:
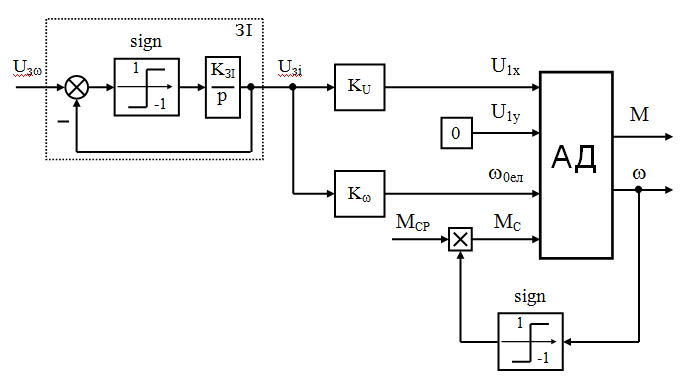 Рисунок 3.3 Схема системикерування при пуску відзадавачаінтенсивності.
Рисунок 3.3 Схема системикерування при пуску відзадавачаінтенсивності.
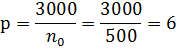
Розрахунок основних параметрів системи:

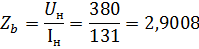
Абсолютні значення опорів:





Розрахунок індуктивностей:



Для виконання умови  розраховуємо коефіцієнти передачі каналів напруги та частоти обертання поля статора наступним чином:
розраховуємо коефіцієнти передачі каналів напруги та частоти обертання поля статора наступним чином:
|
|
|
де Uфнmax - амплітудне значення номінальної фазної напруги статора, В;
UKmax - максимальне значення напруги керування, В;
де  - максимальне значення частоти обертання поля статора, рад/с;
- максимальне значення частоти обертання поля статора, рад/с;
f - номінальне значення частоти напруги мережі живлення, Гц.

Розрахунок перехідних процесів
Розрахунок перехідних процесів в системах регульованого однозонного електроприводу змінного струму, виконаного по структурній схемі представленій на рисунках 7 та 8, виконано на ЕОМ в програмному продукті MATLAB.
Програмавідтворюється методом імітаційно-чисельногомоделюванняперехіднихпроцесів в аналоговихнелінійних системах регульованогоелектроприводу при типовихзадаючих та збурюючихвпливах. Вона дозволяє в широких межах варіювати структуру і значенняпараметрівелементів САР, виводитирезультатирозрахунків у виглядіграфіків, за якимивизначаютьсядинамічніякостісистеми.
Схема набору представлена на рисунку 9.
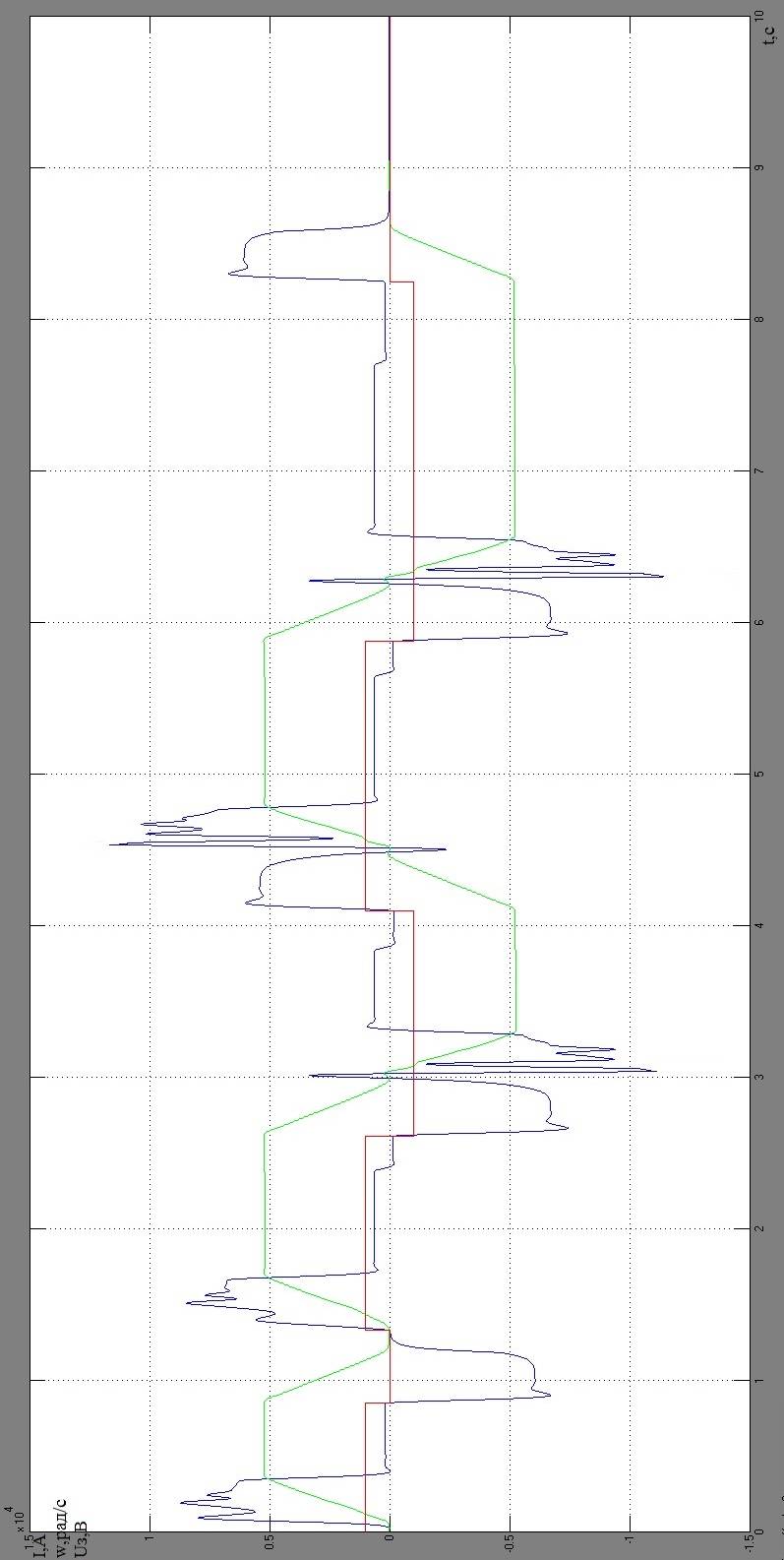
Діаграма циклу роботи електропривода робочого рольгангу представлена на рисунку 10.
| Рисунок 3.4 Схема набору в програмному середовищі Matlab |

| Рисунок 3.5 Діаграма циклу роботи електропривода робочого рольгангу |
|
|
|
Висновки
Виходячи з отриманих графіків динаміки електропривода можна зробити висновок, що схема зібрана правильно та повністю відповідає всім необхідним динамічним характеристикам. Отже розрахунок параметрів схеми був виконаний вірно.
ОХОРОНА ПРАЦІ
Дата добавления: 2018-06-27; просмотров: 261; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!