ИНСТРУКЦИЯ ПО СБОРКЕ РАДИОМЕТОК НА ОСНОВЕ ARDUINONANO
СОДЕРЖАНИЕ
СПИСОК КОМПОНЕНТОВ РОБОТА.. 2
ИНСТРУКЦИЯ ПО СБОРКЕ РОБОТА.. 7
ИНСТРУКЦИЯ ПО СБОРКЕ РАДИОМЕТОК НА ОСНОВЕ ARDUINONANO.. 15
ПРОВЕРКА РАБОТОСПОСОБНОСТИ РЕСУРСНОГО НАБОРА.. 16
СПИСОК КОМПОНЕНТОВ РОБОТА
Корпус робота состоит из основания, стоек одинаковых по своей конструкции и форме, крышки, платформы ультразвукового дальномера.
Основание представлено на рисунке 1.
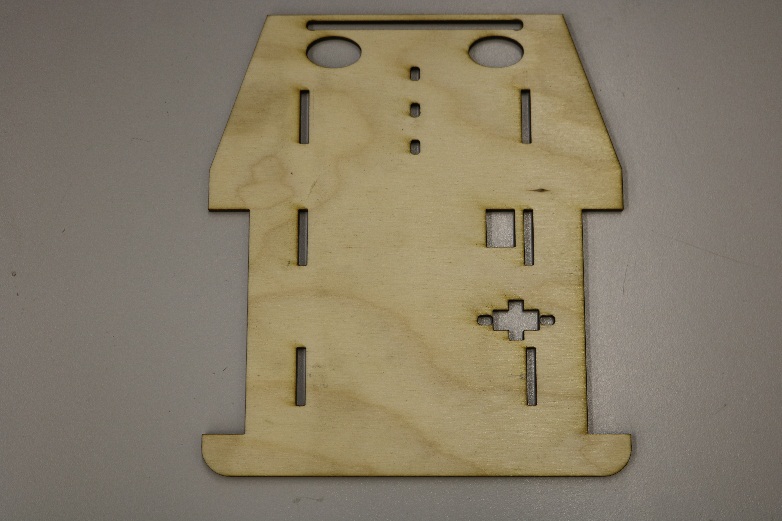
Рисунок 1 – Основание корпуса робота
Стойка представлена на рисунке 2.
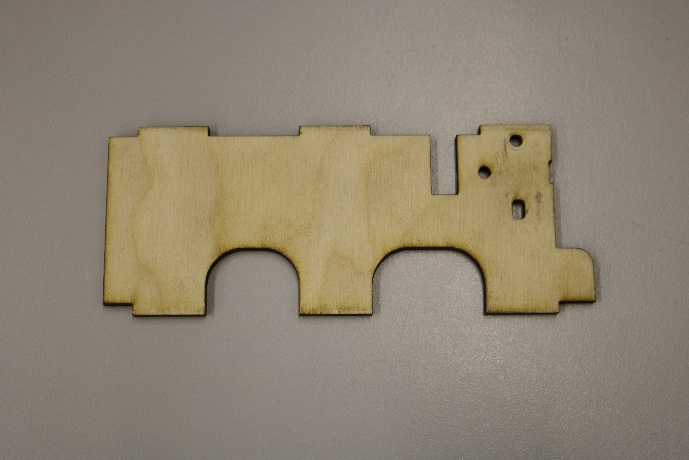
Рисунок 2 – Стойка корпуса робота
Крышка корпусапредставлена на рисунке 3.
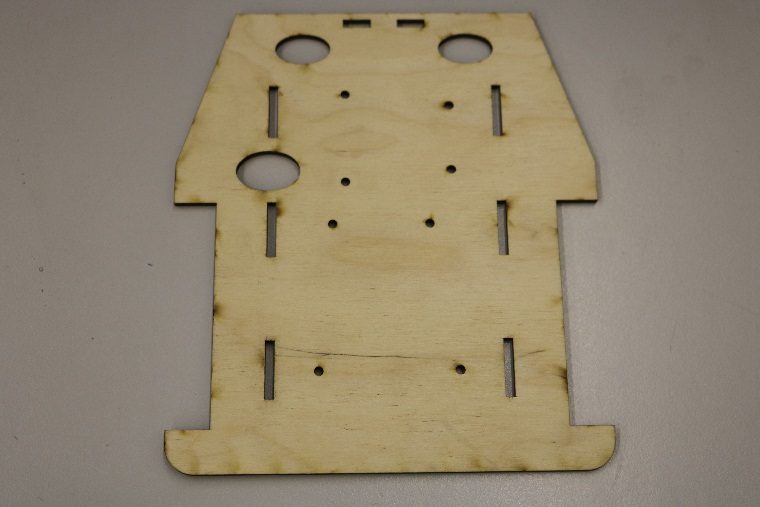
Рисунок 3 – Крышка корпуса
Платформа ультразвукового дальномера представлена на рисунке 4.
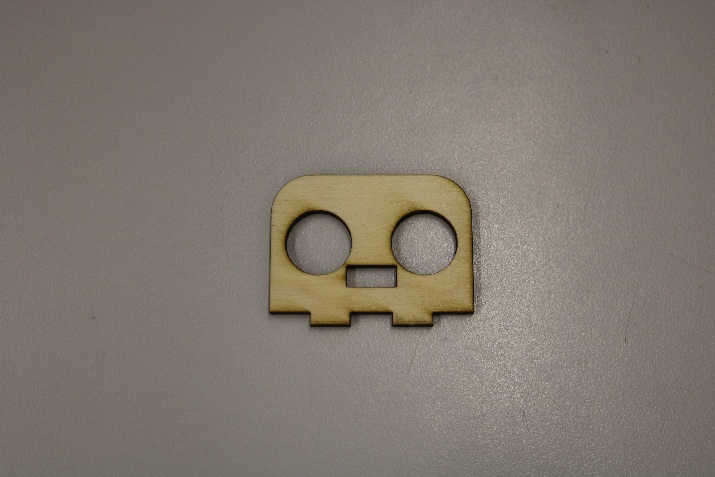
Рисунок 4 – Платформа дальномера
Энкодер датчика скорости представлен на рисунке 5.

Рисунок 5 – Энкодер датчика скорости
Микроконтроллер ArduinoUnov3 представлен на рисунке 6.
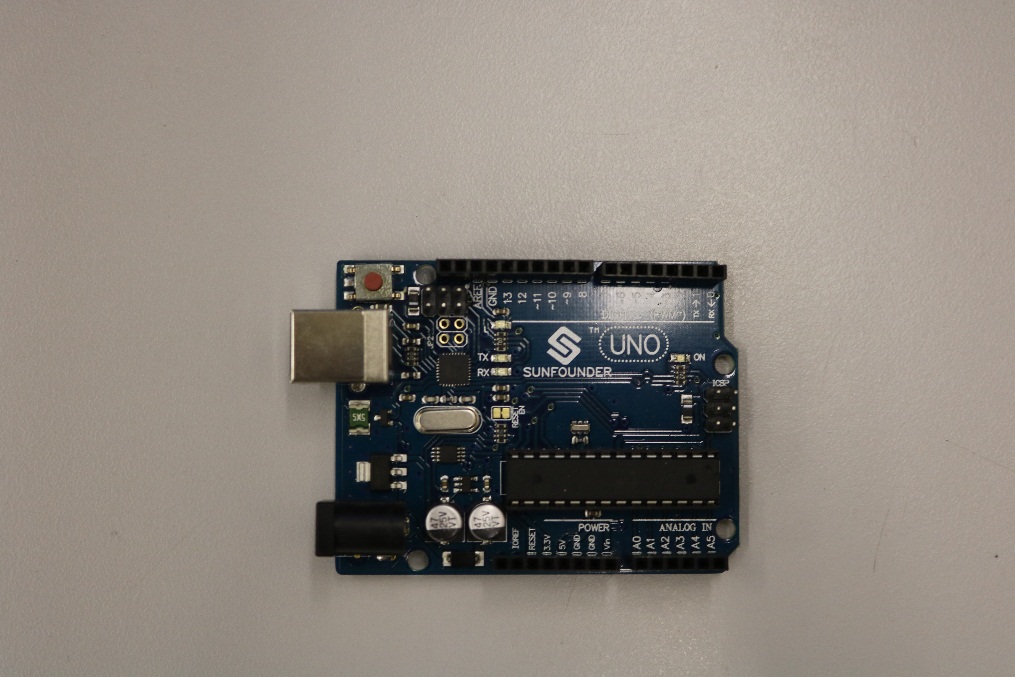
Рисунок 6 – ArduinoUno
ПриемопередатчикNRF24L01представлен на рисунке 7.
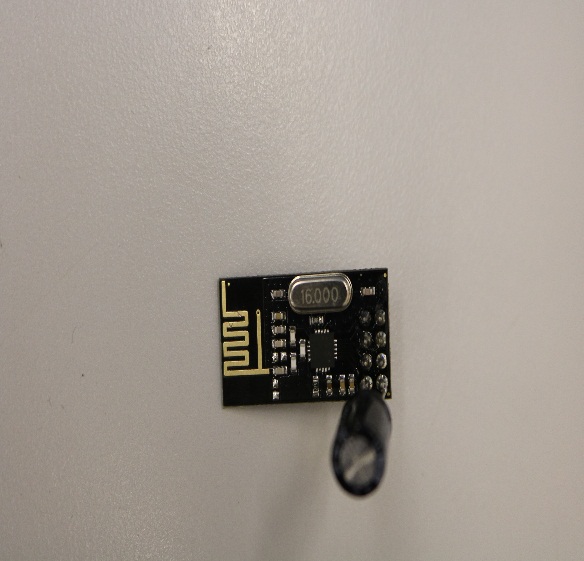
Рисунок 7 – ПриемопередатчикNRF24L01
RFID-считыватель RFID-RC522представлен на рисунке 8.

Рисунок 8 – RFID-RC522
Датчик скорости представлен на рисунке 9.
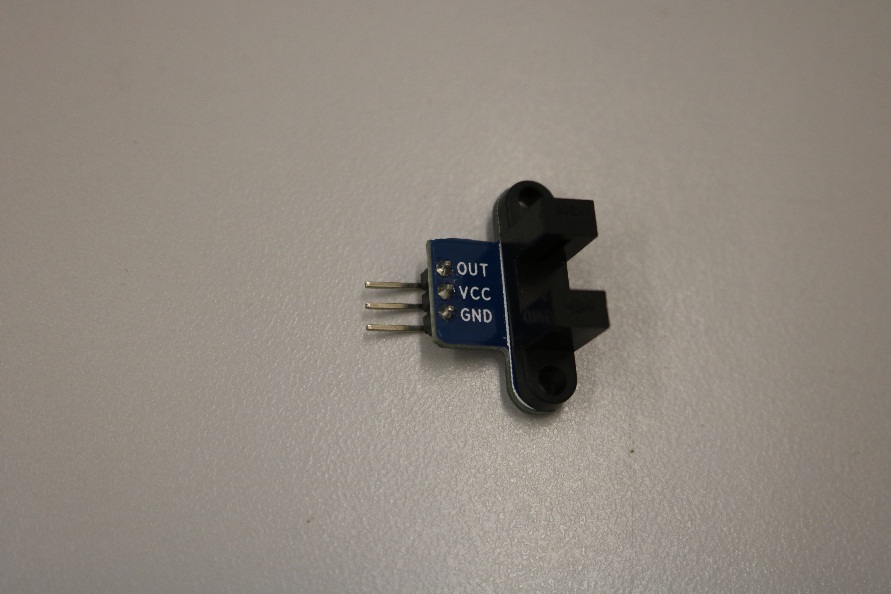
Рисунок 9 – Датчик скорости
Инфракрасные датчики представлены на рисунке 10.
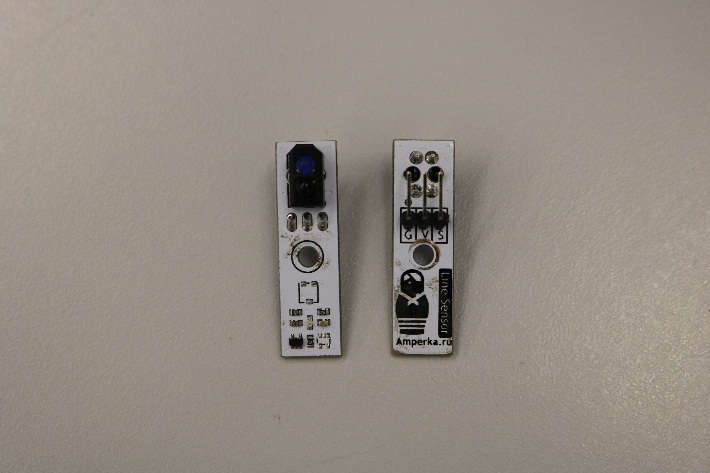
Рисунок 10–Инфракрасные датчики
Ультразвуковой дальномер HC-SR04 представлен на рисунке 11.
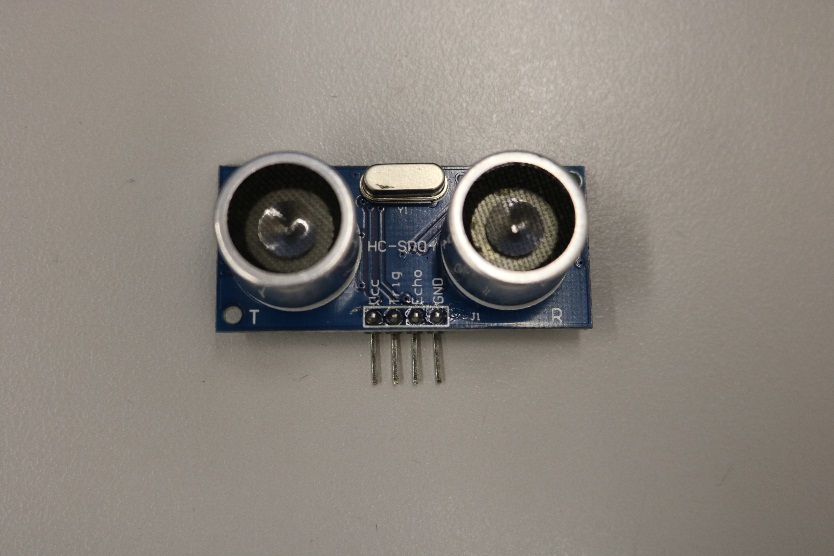
Рисунок 11 – Дальномер HC-SR04
Arduinosensorshieldпредставлен на рисунке 12.
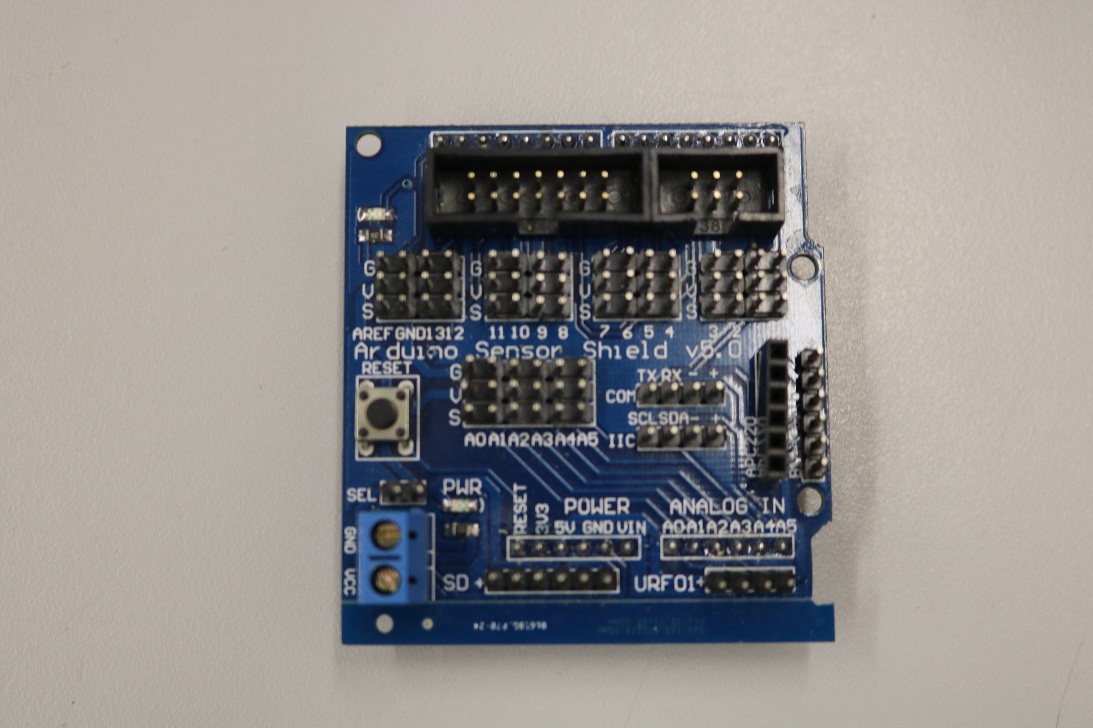
Рисунок 12 – Arduinosensorshield
Arduinomotorshieldпредставленнарисунке 13.
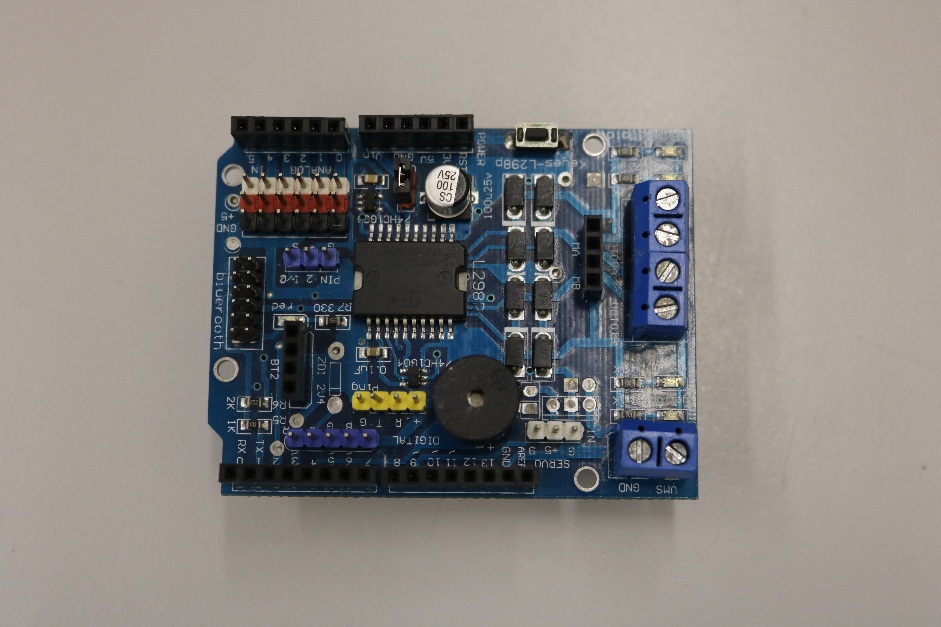
Рисунок 13 – Arduinomotorshield
Клеммник батареи представлен на рисунке 14.

Рисунок 14 – Клеммник батареи
КлючиRFIDпредставлены на рисунке 15.

Рисунок 15 – RFIDключи
ИНСТРУКЦИЯ ПО СБОРКЕ РОБОТА
1.Закрепить переднее колесо на основании корпуса, рисунок 16.
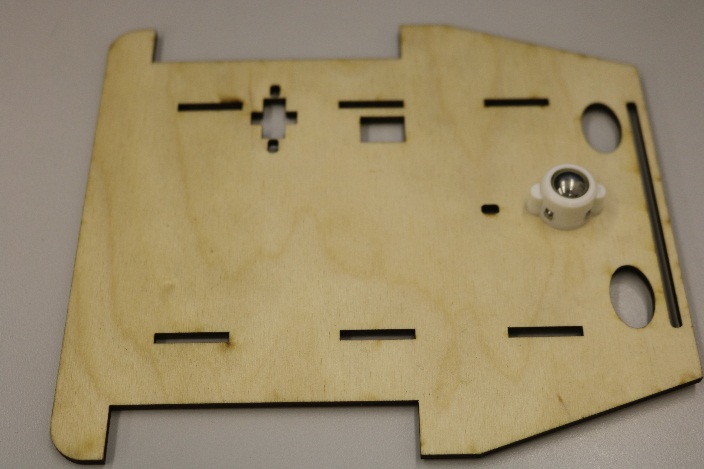
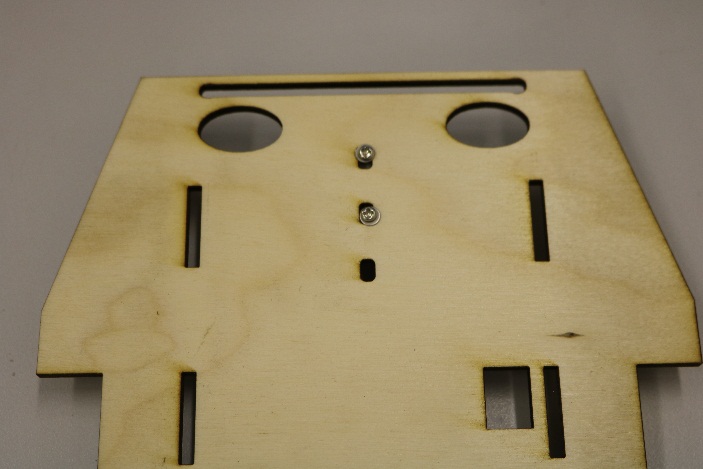
Рисунок 16 – Соединение переднего колеса и основания корпуса
2. Закрепить датчик скорости на основании корпуса, рисунок 17.
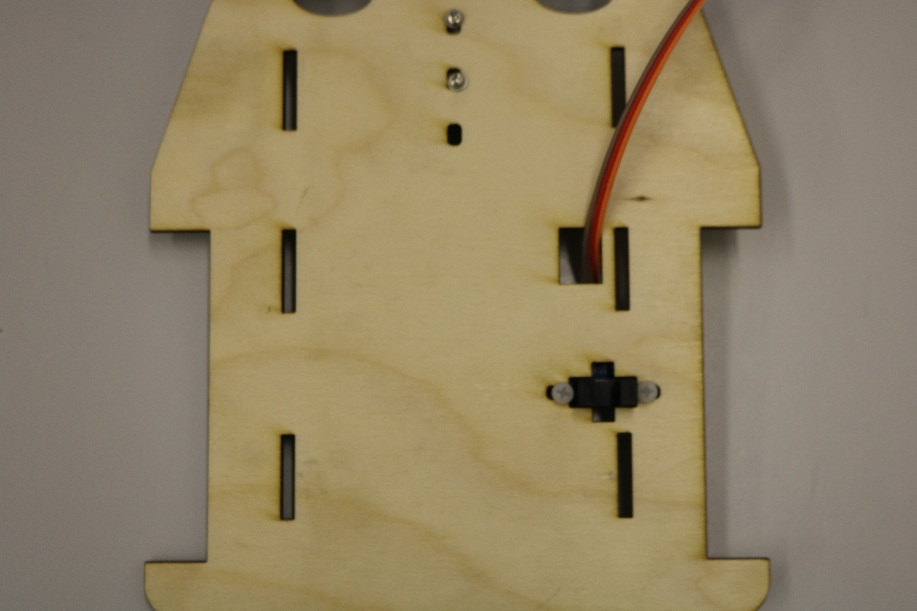
Рисунок 17 – Соединение оптического датчика с основанием корпуса
3. Соединить основание корпуса со стойкой, рисунок 18.
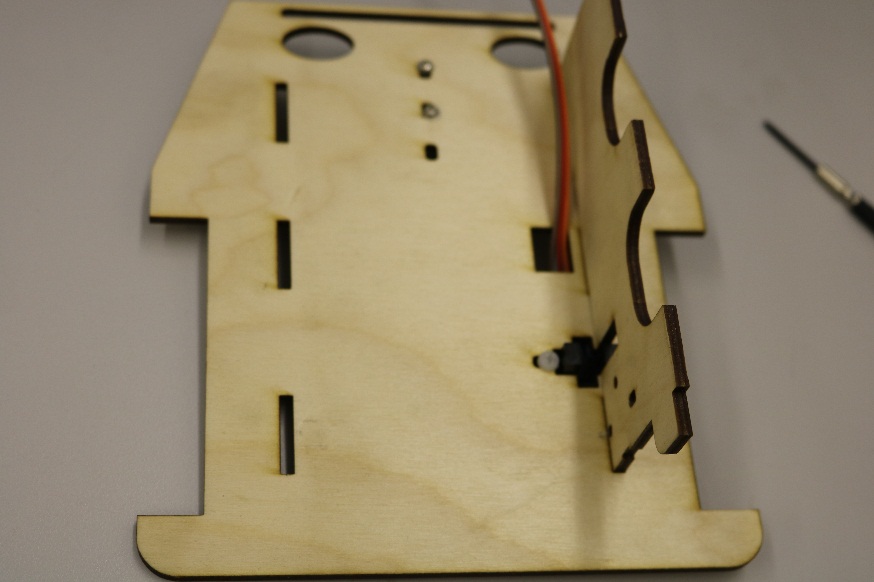
Рисунок 18 – Соединение основания со стойкой
4.Соединить основание со второй стойкой, рисунок 19.
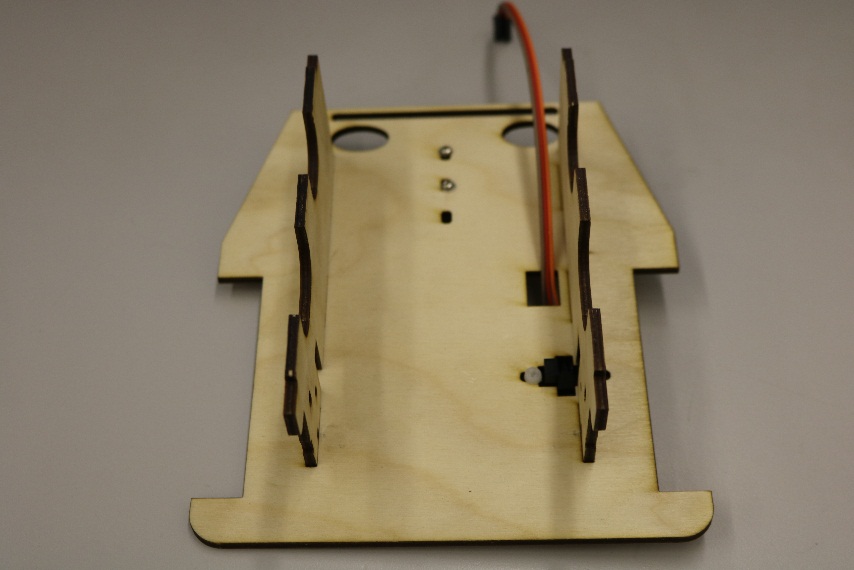
Рисунок 19 – Соединение второй стойки с основанием
5. Закрепитьинфракрасные датчикина основании корпуса, рисунок 20.
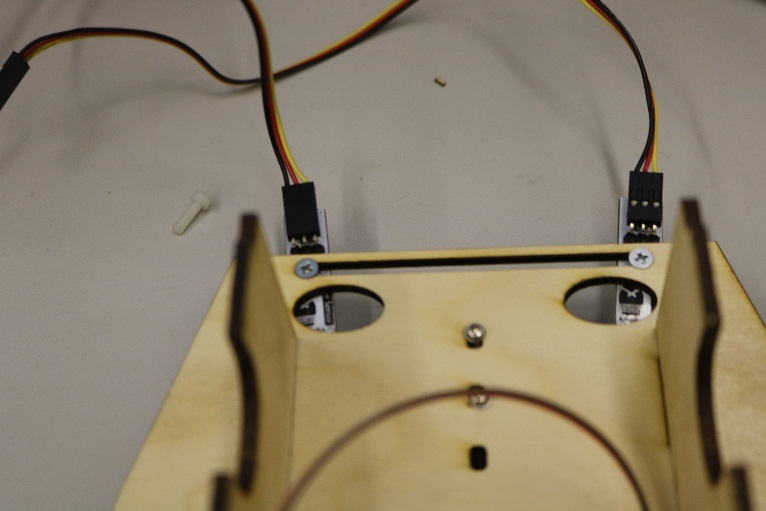
Рисунок 20- Соединение инфракрасных датчиков с основанием корпуса
6. Закрепить мотор на правой стойке, рисунок 21.
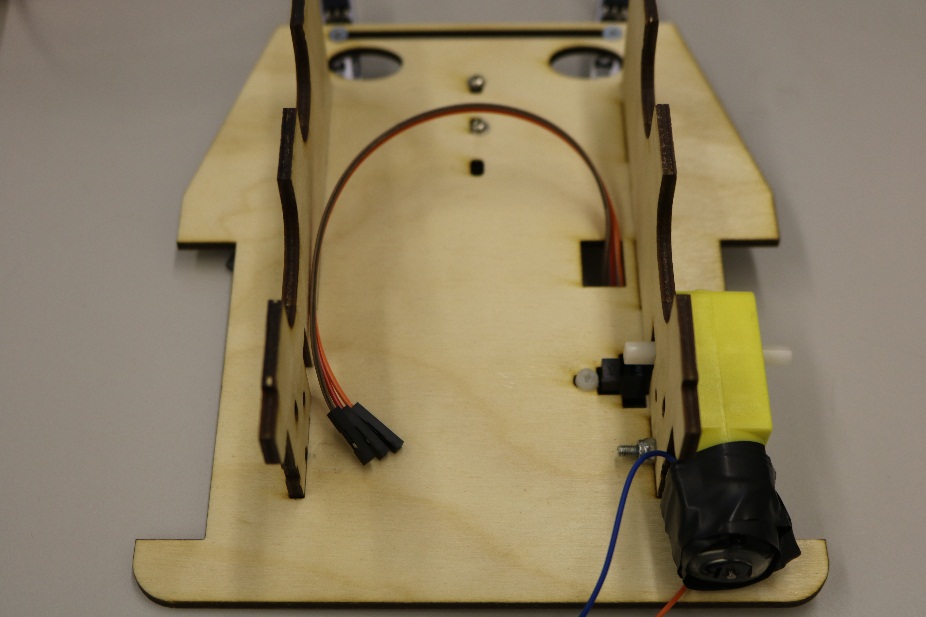
Рисунок 21 - Крепление мотора к правой стойке
7. Установить энкодер датчика скорости на ось мотора, рисунок 22.
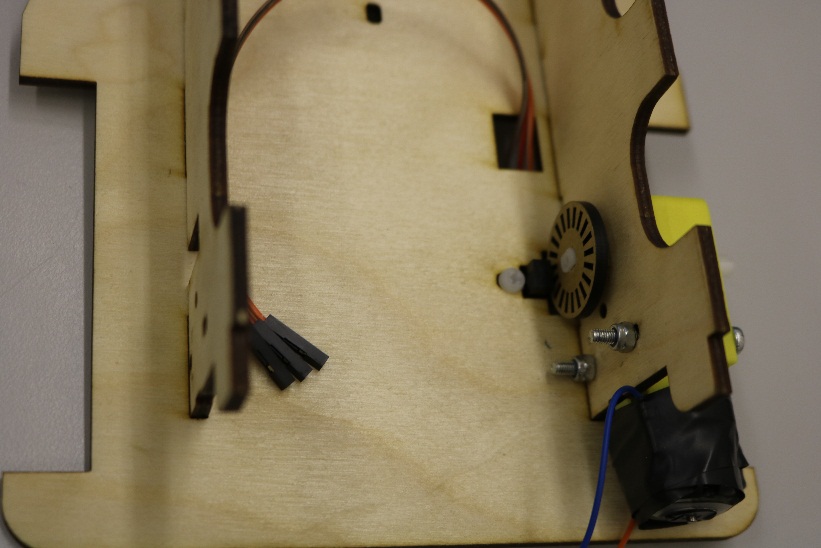
Рисунок 22 – Соединение энкодера с осью мотора
8. Закрепить мотор на левой стойке, рисунок 23.
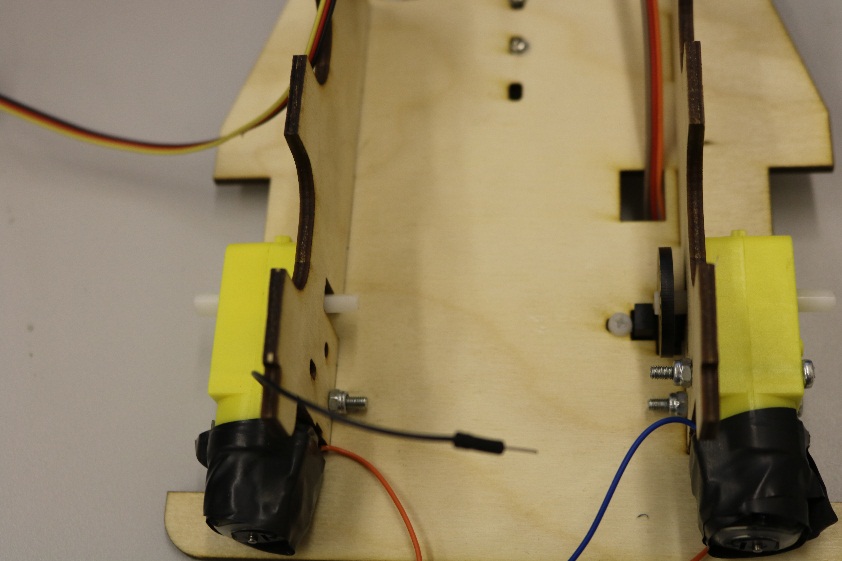
Рисунок 23 – Соединение мотора со стойкой
9. Соединить крышку со стойками, установить колеса на валы моторов, рисунок 24.
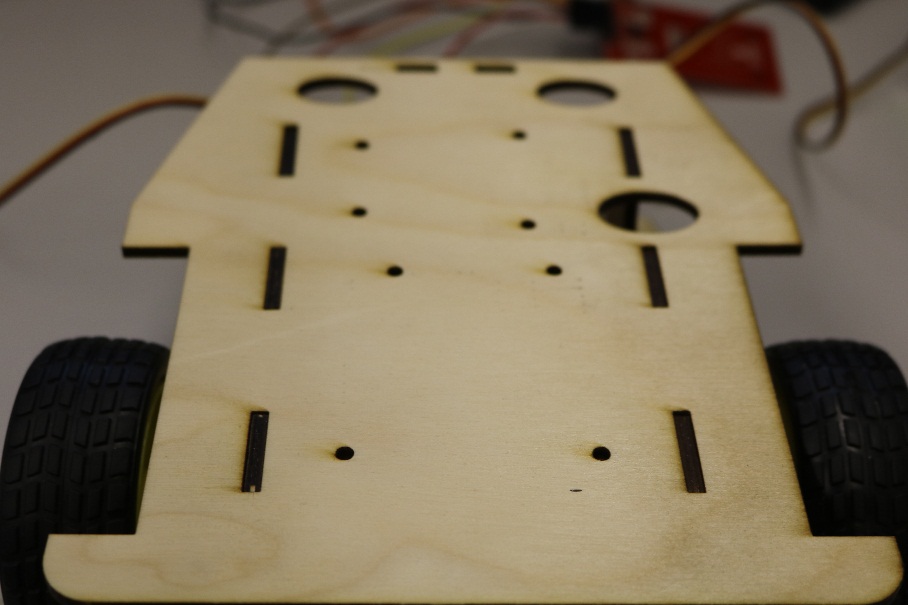
Рисунок 24 – Соединение крышки корпуса со стойками
10. Закрепить микроконтроллер ArduinoUnoна крышке,рисунок 25.
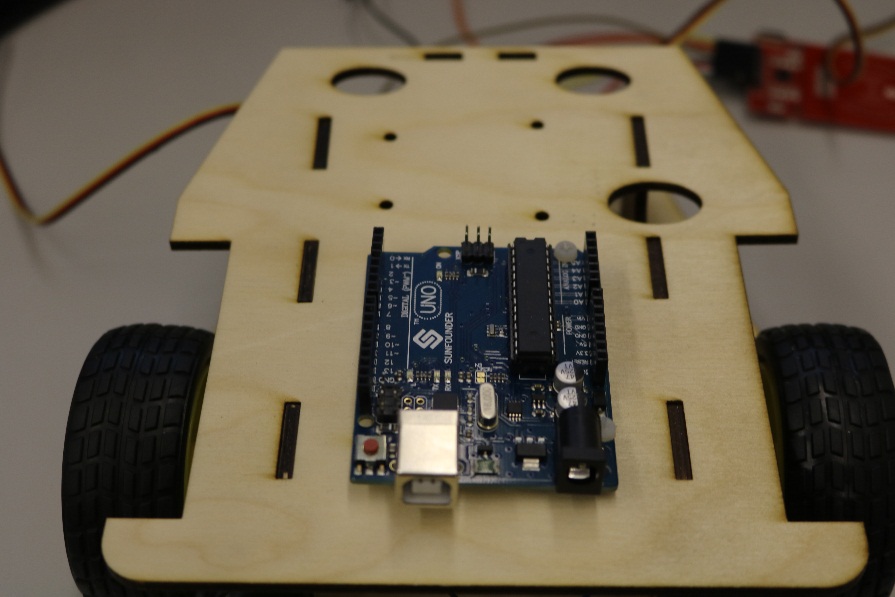
Рисунок 25 – Крепление ArduinoUno
11. Соединить платформу дальномера с крышкой корпуса, рисунок 26.
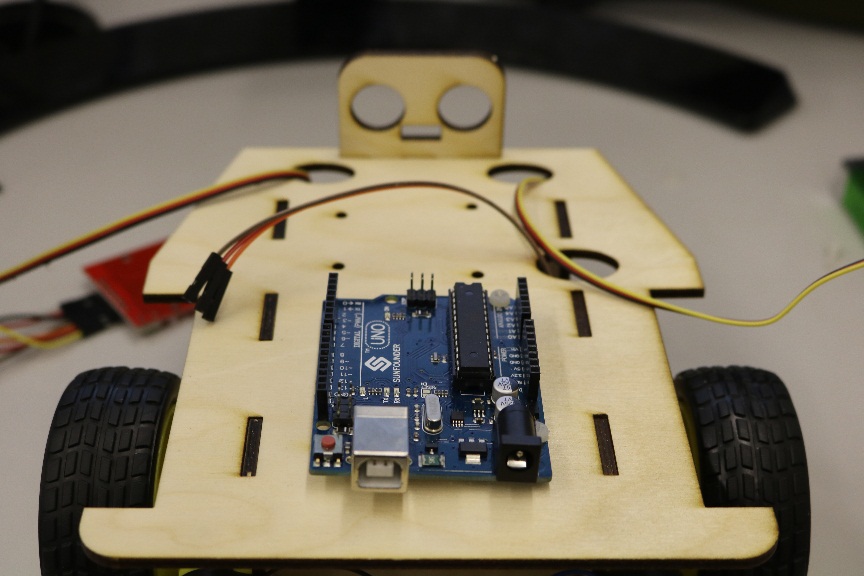
Рисунок 26 – Соединение платформы дальномера с крышкой корпуса
12. Закрепить RFID- RC522 на крышке корпуса, рисунок 27.
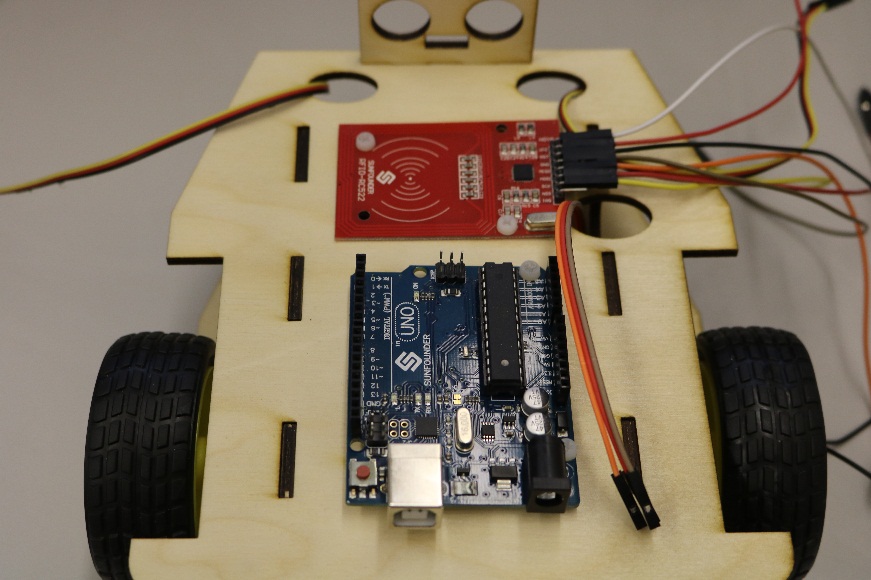
Рисунок 27 – СоединениеRFID- RC522 с крышкой корпуса
13. УстановитьArduinomotorshield, рисунок 28.

Рисунок 28 – УстановкаArduinomotorshield
14. Подключить моторы к Arduinomotorshield, рисунок 29.
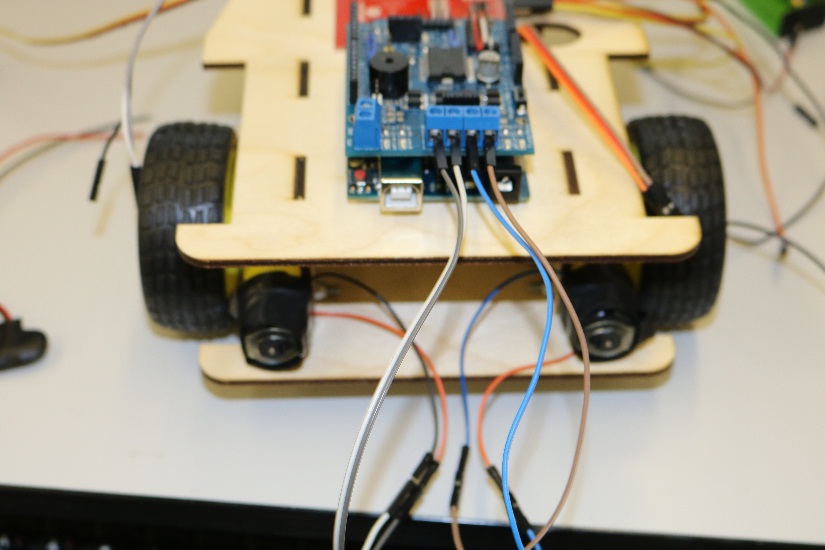
Рисунок 29 – Установка моторов
15. Подключить клеммник к Arduinomotorshield, рисунок 30.
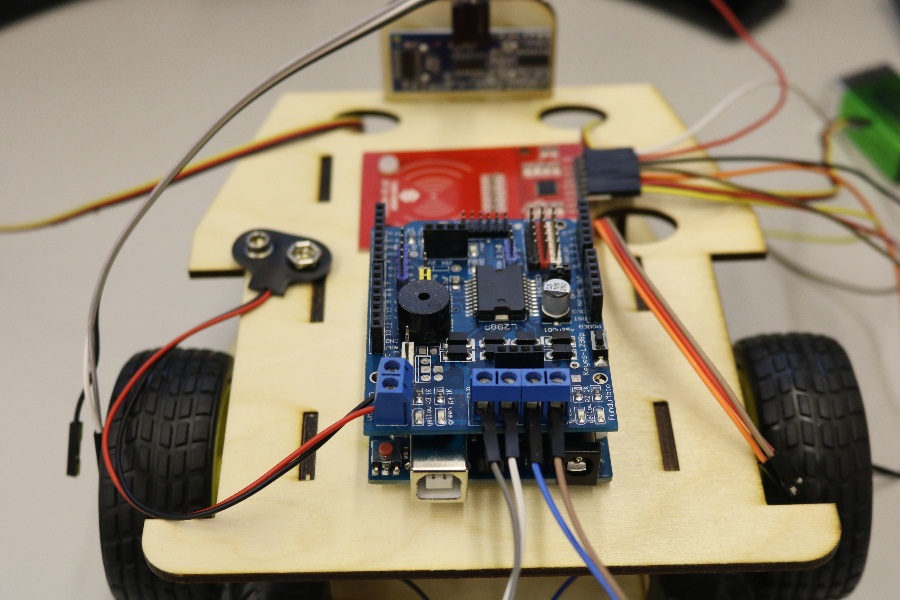
Рисунок 30 – Подключение клеммника
16. УстановитьArduinosensorshield, рисунок 31.
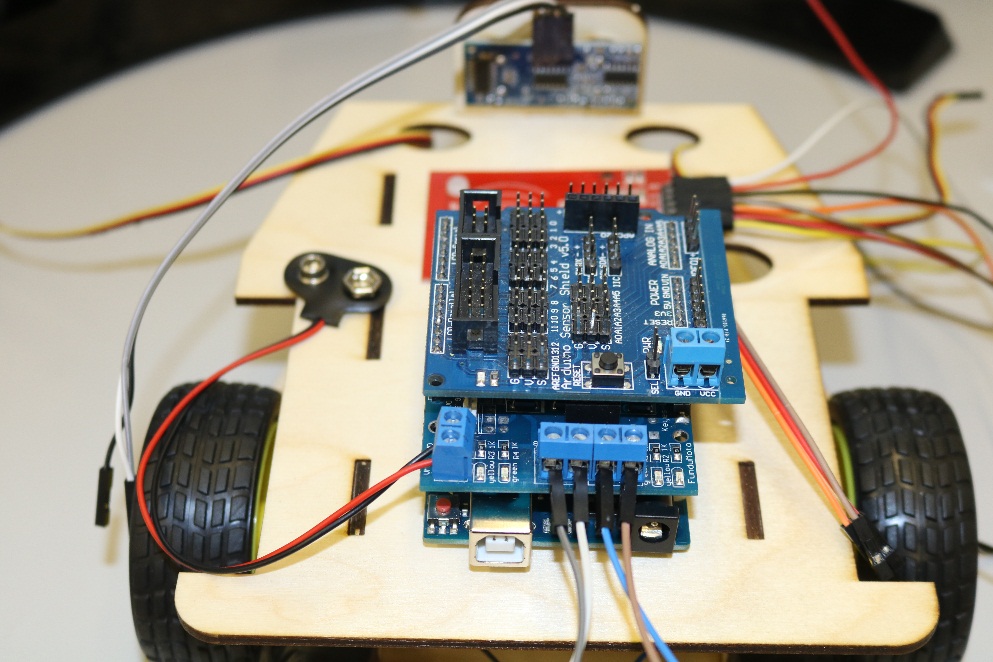
Рисунок 31 – УстановкаArduinosensorshield
17. Подключить к Arduinosensorshield, инфракрасные датчики, радио-передатчик NRF24L01, RFIDRC-522, датчик скорости, ультразвуковой дальномер согласно схемам электрическим принципиальным (рисунки 32-35).
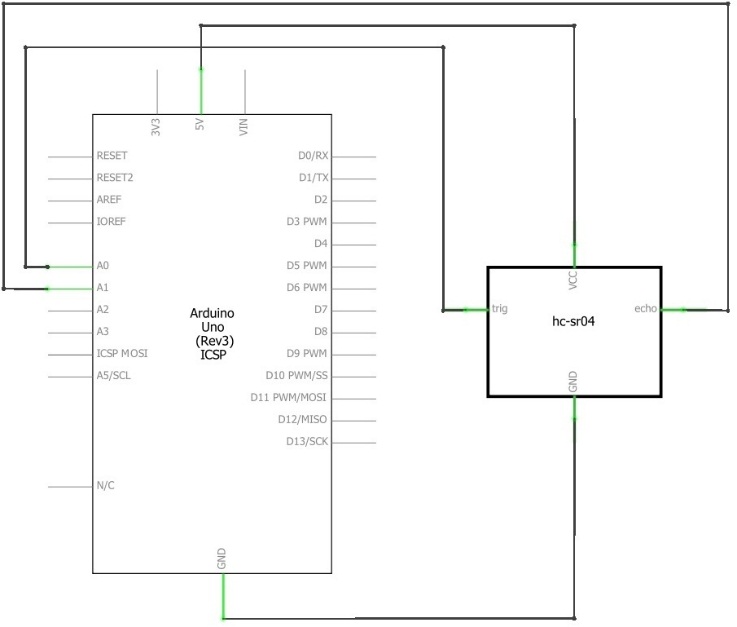
Рисунок 32 – Схема подключения УЗ дальномера
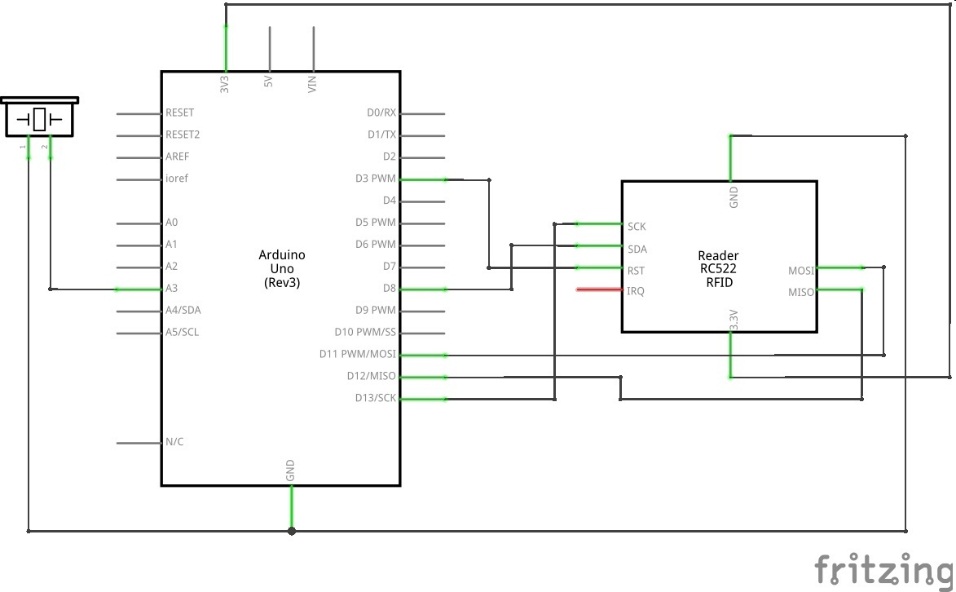
Рисунок 33 – Схема подключения RFID-считывателя и пьезодинамика
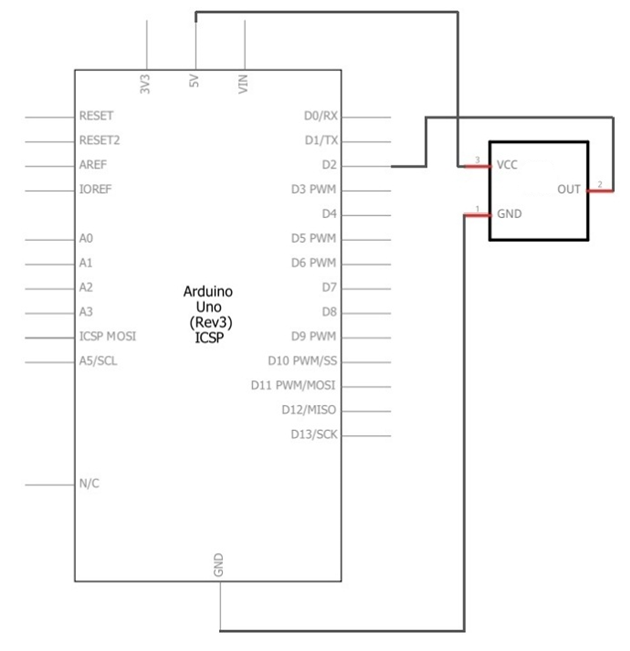
Рисунок 34 – Схема подключения датчика скорости
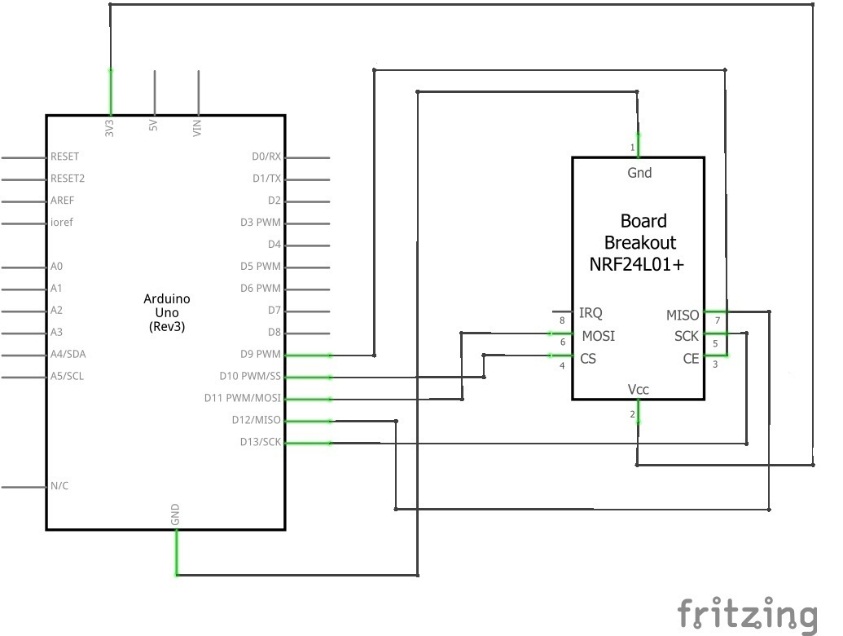
Рисунок 35 – Схема подключения приемопередатчика NRF24L01
ИНСТРУКЦИЯ ПО СБОРКЕ РАДИОМЕТОК НА ОСНОВЕ ARDUINONANO
На рисунке 36 представлена электрическая принципиальная схема радиометки. Обе радиометки ресурсного набора собираются по этой схеме.
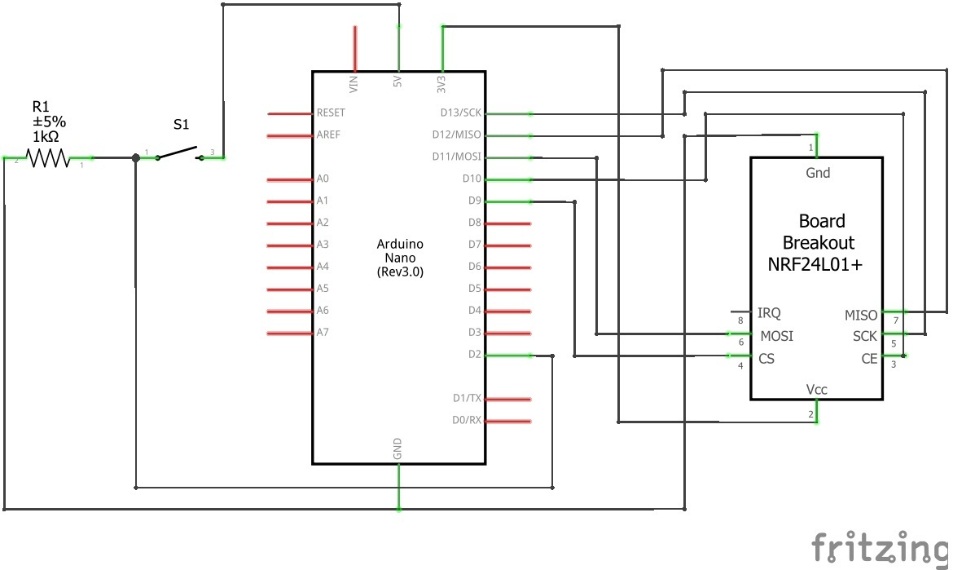
Рисунок 36 – Схема радиометки
Дата добавления: 2018-06-01; просмотров: 209; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!