Технические средства управления толкаемым составом
СОДЕРЖАНИЕ
Введение……………………………………………………………..5
ГЛАВА 1. ТЕОРЕТИЧЕСКАЯ ЧАСТЬ РАБОТЫ
1.1. Технические средства управления толкаемым составом……………………………………….………….…...7
1.2. Особенности толкаемых составов……….………………....10
ГЛАВА 2. СПЕЦИАЛЬНАЯ ЧАСТЬ РАБОТЫ
2.1. Основные сведения о составе………………………………..30
2.2. Характеристика участка проводки……………………..........33
2.3. Формирование толкаемого состава…………………...……..35
2.4. Схема проводки по затруднительному участку…………….39
Заключение………………………………………………………...44
Список использованной литературы…………….……………….50
Приложение………………………………………………………..60
ВВЕДЕНИЕ.
Судно является сложным техническим сооружением, предназначенным для перевозки людей и разного вида грузов. Неправильная его эксплуатация или несоблюдение правил судовождения может повлечь за собой повреждение судна или груза, других судов, а также опасность для человека.
Поэтому, судовождение – это комплекс теоретических дисциплин, в которых изучается управление движением судна на основе непрерывного контроля в виде: визуального, слухового, радиолокационного наблюдения, выбор безопасного курса и скорости, определение местоположения и состояния судна.
Любой вид транспорта при правильной эксплуатации и проводке является безопасным. Все транспортные аварии и происшествия, происходящие в мире, возникают по многим причинам: халатность водителя (в нашем случае судоводителя), отсутствие предрейсовой проверки и подготовки транспорта к переходу, неисправность транспорта, игнорирование этих неисправностей и так далее. Внутренний водный транспорт также не является исключением.
|
|
|
Судоводитель – это “мозг” всего судна. Он должен иметь навыки судовождения, знания в области таких наук как лоция, навигация, правила плавания, чтение карт и другие необходимые для безопасной навигации науки и навыки. Данные навыки и знания приобретаются в процессе обучения, прохождения практик и последующей работе в должности командного состава в течении продолжительного времени.
Несмотря на то, что в наше время судовождение стало более упрощенным с приходом новых технологий - электронная картография, GPS/ГЛОНАСС системы, электронные компасы и т.д, командный состав должен прорабатывать рейс от пункта “А” до пункта “Б” с целью безопасного перехода. Следует учитывать габариты проводимого состава на определённом участке, его учалку, маневренные характеристики состава, внешние факторы и правила плавания. Для этого изначально состав должен быть правильно сформирован согласно “Типовым схемам формирования состава”, надёжно учален, загружен по осадку с учетом габаритов пути.
|
|
|
Например, автору данной работы пришлось самостоятельно проводить состав в районе “Кривого колена” реки Невы. При проводке состава автор столкнулся с рядом трудностей, влияющих на движение. На данном участке существуют неправильные течения, крутой поворот судового хода, отсутствие видимости встречных судов. Пришлось предварительно изучать данный участок с помощью карты, определять все его особенности и сложности. После предварительной проработки состав было провести несколько проще.
В настоящей дипломной работе на тему «Разработка схемы проводки толкаемого состава с толкачом проекта 81 по затруднительному участку водного пути» решаются следующие задачи: ознакомление со сведениями состава, его формировка и проводка по затруднительному участку, а также ознакомление с участком и составление последующей схемы проводки.
Цель настоящей дипломной работы – безопасная проводка судна и выполнение плана-графика перевозок.
Исходные данные для разработки темы: объект исследования – буксир толкач проекта 81 с одной груженной баржой грузоподъемностью 4200 тонн, маршрут плавания– Череповец – Шлюз №8, условия плавания – согласно путевой и гидрометеоинформации, лоции участка, загрузки судна, правил плавания, особенностей движения судов в данном бассейне.
|
|
|
Теоретическая значимость – объединение в дипломной работе комплекса теоретических знаний, приобретённых в процессе обучения и практических навыков при прохождении практик автора диплома.
Практическая значимость – работа способствует подготовке судоводителя к выполнению своих непосредственных обязанностей.
Методы решения поставленных задач – использование руководящей документации, учебной и специальной литературы для подготовки и перехода судна по маршруту.
Ожидаемые результаты – всесторонняя подготовка к безопасной проводке судна по заданному маршруту.
ГЛАВА 1. ТЕОРЕТИЧЕСКАЯ ЧАСТЬ РАБОТЫ
Технические средства управления толкаемым составом
На речном и морском флоте работают различные типы судов такие как: пассажирские, сухогрузные, буксировочные, толкаемые и прочие суда.В связи с развитием типов судов, развиваются и технологии в области двигательно – рулевых установок. Так на примере толкача 81-го проекта автор работы разбирает систему ВРК (винто - рулевые колонки).
|
|
|
ВРК – это двигательно – рулевой комплекс, совмещающий в себе и движитель и средство управления судном. В последнее время ВРК стали активно применять для современных судов, так как упрощается и уменьшается проектировка машинного, румпельного отделения, за счет этого проектировка других помещений может способствовать увеличению площади для грузовых, пассажирских и другого рода помещений. Также упрощается проектировка судна в целом, так как все необходимое оборудование уже интегрировано в сам ВРК комплекс. Но не всегда установка ВРК на судно является целесообразным решением, в связи с ограничением скорости. Так например, компания SCHOTEL заявила о том, что данный тип движетеля их марки следует устанавливать на суда, скорость которых может ограничиваться до 15-18 узлов и его эксплуатация не подразумевает длинных и прямолинейных участков эксплуатации.
Самое главное преимущество ВРК – это его повышеная маневренность. Это не просто маневренность – это маневренность другого уровня, ведь даже на самых малых скоростях можно сделать весь упор на управляемость, придать судну любое направление, а также быстро изменить его в зависимости от ситуации.
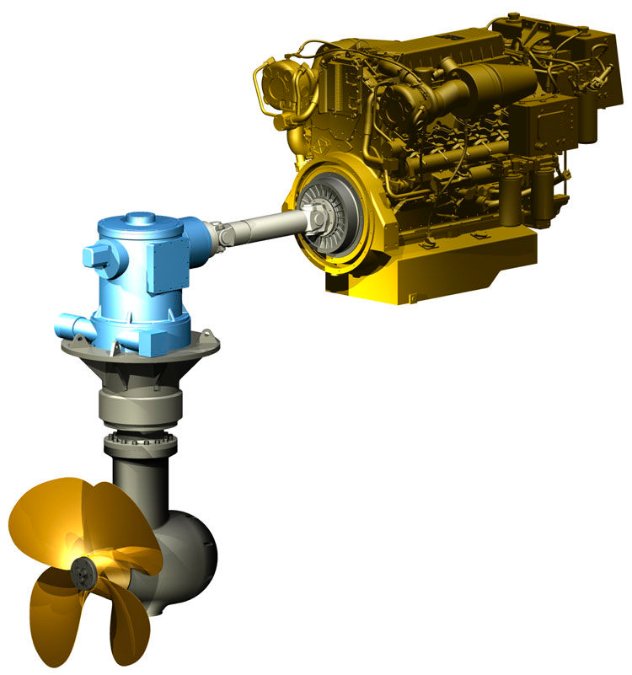 Винто-рулевая колонка состоит из высокомоментного электродвигателя, расположенного в отдельном корпусе — поде. Гребной винт установлен непосредственно на валу электродвигателя, что позволило передавать вращающий момент с двигателя непосредственно на винт, минуя промежуточные валы или редукторы. Отказ от промежуточных элементов пропульсивной системы позволил исключить потери энергии, возникающие в них при передаче энергии с вала двигателя на винт. Установка закреплена вне корпуса судна с помощью шарнирного механизма и может вращаться вокруг вертикальной оси на 360°, что позволяет получить лучшую маневренность судна как по курсу, так и по скорости по сравнению с обычными движительными установками. (см. рис. 1.)
Винто-рулевая колонка состоит из высокомоментного электродвигателя, расположенного в отдельном корпусе — поде. Гребной винт установлен непосредственно на валу электродвигателя, что позволило передавать вращающий момент с двигателя непосредственно на винт, минуя промежуточные валы или редукторы. Отказ от промежуточных элементов пропульсивной системы позволил исключить потери энергии, возникающие в них при передаче энергии с вала двигателя на винт. Установка закреплена вне корпуса судна с помощью шарнирного механизма и может вращаться вокруг вертикальной оси на 360°, что позволяет получить лучшую маневренность судна как по курсу, так и по скорости по сравнению с обычными движительными установками. (см. рис. 1.)
Рис.1. Конструкция и принцип действия ВРК.
В данной части дипломной работы будут разобраны варианты управления судном с помощью ВРК. Рассмотрим несколько примеров маневрирования.
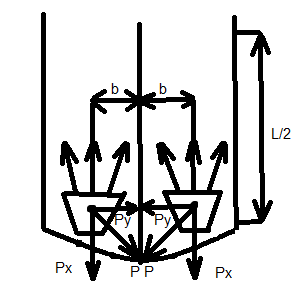
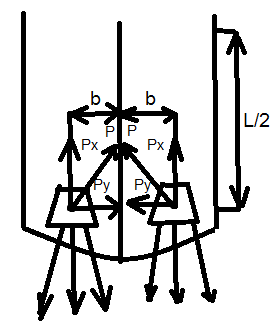 Первый вариант: положение колонок – прямо (см. рис.2.). При изменения направления руля, соответственно изменяется направление струи относительно ДП (диаметральной плоскости), а следовательно и изменяется сила упора Р, ведь каждая насадка направлена под определённым углом к ДП. Вследствии чего возникакают также ещё две силы: Рх – движущая сила, направленная по направлению ДП, Ру- рулевая сила, направленная перпендикулярно ДП. Также возникают плечи сил: b – равное половине расстояния между ВРК, L/2 – равное половине длины корпуса судна.Так как все силы уравновешенны – судно будет двигаться прямо
Первый вариант: положение колонок – прямо (см. рис.2.). При изменения направления руля, соответственно изменяется направление струи относительно ДП (диаметральной плоскости), а следовательно и изменяется сила упора Р, ведь каждая насадка направлена под определённым углом к ДП. Вследствии чего возникакают также ещё две силы: Рх – движущая сила, направленная по направлению ДП, Ру- рулевая сила, направленная перпендикулярно ДП. Также возникают плечи сил: b – равное половине расстояния между ВРК, L/2 – равное половине длины корпуса судна.Так как все силы уравновешенны – судно будет двигаться прямо
Второй вариант: положение колонок – назад. Чертим схему сил, на которой мы можем наблюдать, что все силы так же уравновешенны, поэтому судно будет двигаться назад.(см. рис.2.)
(А) (Б)
Рис.2. Схема сил, при прямом (А) и обратном (Б) положении ВРК.
Третий вариант: левая колонка напрвлена влево, работает на передний ход, правая направлена влево, работает на задний ход.(см.рис.3.(А)). Начертив данную схему можно наблюдать следующее: силы Рх и Ру создают поворачивающий момент одного направления. Следовательно, можем составить сумму: Моб = Ру (L/2) + Рхb + Ру(L/2) + Рхb = РуL + 2Рхb.
Можно сделать вывод: из за большого поворачивающего момента, судно обеспечено большим вращающим моментом которое необходимо во время маневрирования.
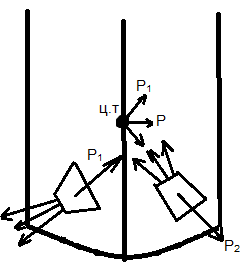
Четвёртый вариант: левая колонка направлена вправо, работает на передний ход, правая колонка направлена вправо, работает на задний ход.(см.рис.3.(Б)). Чертим схему, что бы понять действие сил в данном варианте направлений насадок, продлим вектора сил Р1 и Р2 до пересечения с ДП судна. Силы условно пересекуться в центре тяжести, образуя равнодействующую силу Р, которая направлена направо. При определённых режимах работы ВРК позволяет судну двигаться лагом, в данном случае в правом направлении.
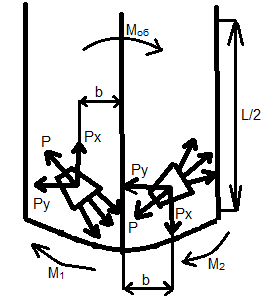
(А) (Б)
Рис.3.Схема сил, при циркуляции (А), движении лагом (Б).
Вывод: данный тип двигательно – рулевого комплекса облегчает маневрировать судном, а также имеет и другие варианты управления посредством изменения положения и работы ВРК.
Дата добавления: 2018-06-01; просмотров: 1352; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!