Реализация структурной схемы САУ на ЭВМ
Реализация структурной схемы САУ на SIMULINC не выдает ошибок. Система является работоспособной.

Рис. 4 - Реализация структурной схемы внутреннего контура САУ
По построенной схеме получим переходный процесс

Рис. 5 - Переходной процесс внутреннего контура САУ
В соответствии с расчетами и как видно из графика, внутренний контур системы устойчив.
Определение устойчивости системы
Внешний контур системы

Знаменатель является характеристическим уравнением системы. Из этого уравнения найдем коэффициент усиления электронного усилителя.
По критерию Рауса - Гурвица все коэффициенты должны быть положительны определены и матрицы составленные из этих коэффициентов неотрицательны.
В нашем случае все коэффициенты положительны, а определители
равны соответственно.
Реализация структурной схемы САУ на SIMULINC не выдает ошибок. Система является работоспособной.

Рис. 6 - Реализация структурной схемы САУ
Подставив найденный коэффициент k , получим графики переходных процессов по ошибке и на выходе из системы.

Рис. 7 – Переходный процесс САУ внешнего контура системы
Данная системы является неустойчивой, так как система совершает колебания с увеличивающейся амплитудой.
Ввод корректирующего устройства САУ
|
|
|
Для достижения устойчивости введем последовательное корректирующее устройство.
Передаточная функция неизменяемой части САУ:

Строим ЛАХ неизменяемой части:

Декремент затухания:

 .
.

Строим ЖЛАХ:
· НЧ область.
Порядок астатизма 
 , следовательно наклон равен -ν20дб/дек.
, следовательно наклон равен -ν20дб/дек.

· СЧ область. Наклон -20дб/дек. Требуемое время регулирования
tp=0,6 c. По номограмме Солодовникова находим частоту среза

Нормы запасов устойчивости для систем с высокими показателями качества: НМ=16 дб, -НМ=-14 дб.
· ВЧ область. Для наиболее простой реализации последовательного корректирующего устройства наклоны ВЧ части ЖЛАХ примем равными наклонам ЛАХ неизменяемой части.
Строим ЛАХ корректирующего устройства.

Построенные ЛАХ неизменяемой части, желаемая ЛАХ и ЛАХ корректирующего устройства представлены в приложении.

Передаточная функция корректирующего устройства:

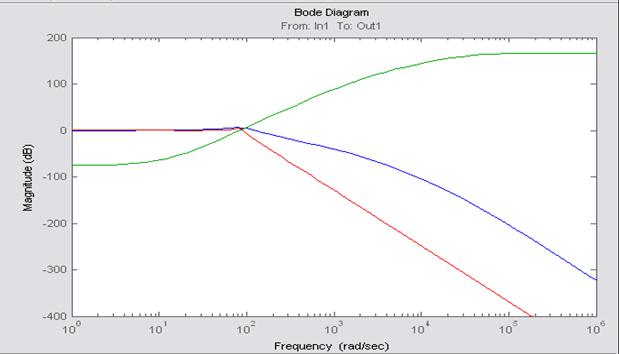
Рис. 8 ― ЛАХ неизменяемой, желаемой и синтезированной САУ
Рис. 9 ― ЛАХ неизменяемой, желаемой и синтезированной САУ
По передаточной функции корректирующего устройства выбираем схему корректирующего устройства и рассчитываем параметры его элементов.
|
|
|
Выберем схемы пассивных четырехполюсников:
1.  .
.


2.  .
.
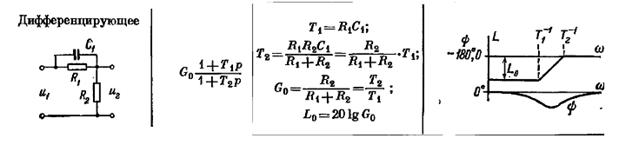


3. 

Возможно применение элементов и с другими параметрами при условии, что они будут удовлетворять условиям нахождения постоянных времени.
Схема корректирующего устройства:

Структурная схема синтезированной САУ.

Оценим устойчивость полученной системы по переходному процессу.

Рис. 10 – Переходный процесс синтезированной САУ
В переходном процессе схему замкнутой синтезированной САУ величина выходного сигнала стремиться к установившемуся значению, следовательно, она является устойчивой. Время и величина перерегулирования tp=0,59 с, σ=24,8%.
Заключение
В данной работе мы произвели анализ исходных данных и из функциональной схемы построили структурную схему САУ и реализовали ее на ЭВМ. Получили передаточные функции основных и дополнительных элементов САУ. С помощью пакета Simulink построили графики переходных процессов. Произвели анализ устойчивости и пришли к выводу, что данная система, не смотря на то, что ее внутренний контур устойчив, является неустойчивой, а, следовательно, не может поддерживать режим работы объекта и требует корректировки.
|
|
|
Поэтому мы провели синтез САУ и подобрали такое корректирующее устройство, при котором система должна была отвечать необходимым параметрам.
Построили ЛАХ и ЛФХ разомкнутой синтезировано САУ. Убедились, что разомкнутая САУ получилась устойчивой.
Составили структурную схему замкнутой синтезированной САУ.
Для него получили графики переходного процесса. В переходном процессе величина выходного сигнала стремиться к установившемуся значению, следовательно, она является устойчивой. Время и величина перерегулирования tp=0,59с, σ=24,8%.
Произвели анализ скорректированной САУ и пришли к выводу, что данная САР устойчива, соответствует основным показателям качества tp˃0,6с, σ˃25% и, следовательно, является работоспособной.
Список литературы
1. Бесекерский В.А., Попов Е.П. Теория систем автоматического регулирования. – М.:Наука, 1975. – 768 с.
2. Воронов А.А. Основы теории автоматического управления: Особые линейные и нелинейные системы. – 2-е изд. перераб. и доп. – М.: Энергия, 1981. – 304 с.
Дата добавления: 2018-05-30; просмотров: 278; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!