Исходные данные, необходимые для проведения структурного синтеза.
В сложившейся практике разработки сложных технических систем исходные данные, потребные для проведения структурного синтеза, неотъемлемы от метода его осуществления. Последнее время широко применялся и постоянно совершенствовался морфологический метод. Под морфологией технической системы понимают ее: построение, внутреннюю структуру, состав подсистем (элементов), способы образования ТС из различных подсистем (элементов), обеспечивающих выполнение всех задач (функций) в соответствии с ее назначением и требуемыми характеристиками в заданных условиях эксплуатации.
Отсюда следует, что в качестве исходных данных будут выступать различные сведения о предполагаемой ТС, условиях ее применения и т.п. В частности, к ним им относятся:
задачи, которые должны решаться ТС;
внутренние процессы функционирования, взаимосвязь процессов функционирования;
внешние условия функционирования, характеристика внешних воздействий, основные связи с другими ТС (объектами);
требуемые параметры процессов функционирования отельных подсистем;
критерии качества выполнения операций и всего процесса функционирования ТС, а также различные ограничения;
варианты (пути) технической реализации каждого выбранного типа подсистемы (элемента) с учетом их взаимосвязей в ТС и др.
На основе этих сведений разрабатывается морфологическая таблица определенного типа, которая в компактном виде содержит информацию, необходимую для проведения структурного синтеза.
Пример решения задачи структурного синтеза
Рассмотрим алгоритм решения задачи структурного синтеза методом динамического программирования (ДП) на конкретном примере.
Пример 1. Допустим, что необходимо синтезировать структуру электропривода (ЭП) для перспективного объекта управления, которая должна включать в себя 3 подсистемы: электродвигатель (ЭД), передаточный механизм (ПМ), исполнительный механизм (ИМ).
Оптимальный вариант структуры ЭП должен удовлетворять следующим критериям: обязательно удовлетворять ограничениям по стоимости  и массе
и массе  и гарантировать наибольшую вероятность работы P, т.е.
и гарантировать наибольшую вероятность работы P, т.е.
 (3)
(3)
где  ,
,  ,
,  - вероятность безотказной работы, стоимость и масса i-ой подсистемы, входящей в состав электропривода;
- вероятность безотказной работы, стоимость и масса i-ой подсистемы, входящей в состав электропривода;  ,
,  - допустимые значения стоимости и массы электропривода.
- допустимые значения стоимости и массы электропривода.
Варианты возможной технической реализации каждой из подсистем привода и их характеристики приведены в морфологической табл. 1.
Таблица 1
Исходные данные
| Тип подсистемы | Вариант технической реализации подсистемы | Характеристики | ||||
|
| , у.ед.
| ,у.ед.
| ||||
| ЭД | А0 | ЭД1 | а01 | 0.83 | 50 | 50 |
| ЭД2 | а02 | 0.82 | 50 | 100 | ||
| ПМ | А1 | Гиропривод | а11 | 0.80 | 100 | 100 |
| Механический редуктор | а12 | 0.85 | 180 | 100 | ||
| ИМ | А2 | Гидравлический домкрат | а21 | 0.80 | 100 | 70 |
| Винтовой домкрат | а22 | 0.85 | 120 | 80 | ||
Заданы допустимые значения стоимости и массы электропривода:
 ,
, 
Допустим, что техническая реализация электропривода возможна в нескольких вариантах взаимосвязи (связки) его подсистем. Соответствующий морфологический граф, отражающий эти варианты взаимосвязи подсистем, показан на рис.1.
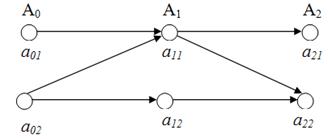
Рис.1. Морфологический граф
Метод динамического программирования в данном случае сводится к расчету по выражениям (3) соответствующих показателей для связки подсистем в несколько шагов.
При этом количество шагов определяется количеством подсистем n, входящих в состав системы (электропривода). В рассматриваемом случае таких подсистем равно n=3, следовательно, шагов будет также 3.
Из морфологического графа, представленного на рис.1, вытекают следующие шаги:
шаг № 1 – выписываем значения показателей (критериев) для вариантов реализации подсистемы А0;
шаг № 2 – рассчитываем значения показателей для связки вариантов реализации двух подсистем А0 и А1;
шаг № 3 – рассчитываем значения показателей для связки вариантов реализации трех подсистем А0, А1; А2.
Результаты расчетов представлены в табл.2.
Таблица 2
Расчетная таблица динамического программирования
| Обозначения элементов морфологического графа и значения | |||||
| Шаг № 1 | Шаг № 2 | Шаг № 3 | |||
| а01 | P1 =0.83 C1 =50 M1 =50
| а01 – а11
| P2 =0.83 C2 =50 M2 =50 | а01 – а11 – а21 | P3 =0.532 C3 =250 M3 =220 |
| а01 – а11 – а22 | P3 =0.563 C3 =270 M3 =230 | ||||
| а02 | P1 =0.82 C1 =50 M1 =100
| а02 – а11 | P2 =0.656 C2 =150 M2 =200 | а02 – а11 – а22 | P3 =0.544 C3 =270 M3 =230 |
| а02 – а12 | P2 =0.697 C2 =230 M2 =200 | а02 – а12 – а22 | P3 =0.593 C3 =350 M3 =280 | ||

Из табл.2 следует, что вариант связки а02 – а12 – а22 имеет наибольшую вероятность безотказной работы (P3 =0.593), но он не удовлетворяет ограничению по стоимости, т.к. C3 =350 у.ед. ≥Cдоп.
Другие варианты: а01 – а11 – а21; а01 – а11 – а22; а02 – а11 – а22 ограничению по стоимости С и массе М удовлетворяют (см. табл.2), но из 3-х вариантов - второй имеет наибольшую вероятность: P3 =0.563. Поэтому лучшим является вариант связки, у которой вероятность выше: связка а01 – а11 – а22.
Таким образом, в рассмотренном примере в оптимальную структуру электропривода входят: электродвигатель первого типа а01, передаточный механизм первого типа а11 - гидравлический привод и исполнительный механизм второго типа а22 - винтовой домкрат.
Контрольные задания
Задание 1. Решить пример 1 по исходным данным, приведенном в нем. Построить морфологический граф. Исходные данные, представленные в табл.1, оформить в Microsoft EXCEL. Провести расчеты в Microsoft EXCEL по формулам (3) и результаты представить в Microsoft EXCEL по форме табл.2. Сравните полученные результаты с результатами, приведенными в примере 1.
Задание 2. Дана структура электропривода для перспективного объекта управления. Исходные данные представлены в морфологической табл.3. Варианты из трех сочетаний подсистем, входящих в электропривод (электродвигатель (ЭД), передаточный механизм (ПМ), исполнительный механизм (ИМ)), представлены в табл.4.
Необходимо выбрать оптимальную структуру электропривода (ЭП) из трех возможных сочетаний подсистем, обеспечивающую наибольшую вероятность P безотказной его работы, с учетом того, что допустимые значения стоимости и массы электропривода известны: Cдоп =300 усл.ед.; Мдоп = 400 усл.ед. Исходные данные для своего варианта приведены в табл.5. Построить морфологический граф. Исходные данные оформить в Microsoft EXCEL. Провести расчеты в Microsoft EXCEL по формулам (3) и результаты представить в Microsoft EXCEL по форме табл.2. Представить алгоритм решения задачи.
Указания. 1. Варианты контрольных заданий для проверки знаний студентов выдает преподаватель.
2. Все расчеты проводятся на ПК с использованием табличного процессора Microsoft EXCEL и созданием формульных зависимостей в соответствующих ячейках таблиц.
3. Построение графиков проводятся на ПК с использованием табличного процессора Microsoft EXCEL.
4. По результатам работы проводится анализ, и делаются выводы.
5. Результаты представляются преподавателю на проверку и сохраняются в папке студента.
6. Защита письменных отчетов проводится на следующем практическом занятии.
Структура отчета
По материалам работы каждым студентом составляется отчет по установленной форме с использованием Microsoft WORD.. Расчеты, диаграммы, графики следует выполнять с использованием ПЭВМ. Особое внимание при оформлении отчета студенты должны обратить на составление выводов по выполненной работе. В выводах нужно сопоставить результаты проведенных исследований с известными из теоретического курса закономерностями и выяснить согласованность полученных результатов с теоретическими. Полностью оформленный исполнителем отчет представляется каждым студентом преподавателю на следующем занятии.
Отчет по работе на практическом занятии должен содержать:
1. Титульный лист, оформленный по образцу.
2. Исходные данные в виде таблиц, выполненных в Microsoft WORD или EXCEL.
3. Результаты расчетов по заданиям в виде таблиц, рисунков в Microsoft WORD и/или Microsoft EXCEL.
4. Выводы по заданиям.
К отчету прилагаются программы табличного процессора Microsoft EXCEL в электронном виде.
Представленные в отчете результаты, порядок их получения (расчетов) студенты обязаны уметь четко пояснить. За проведенную работу и оформленный отчет преподаватель выставляет дифференцированную оценку.
Исходные данные
К заданию 2.
Таблица 3
| Тип подсистемы | Вариант технической реализации | Характеристики | ||||
| Pn | Cn, у.ед. | Mn,у.ед. | ||||
| ЭД | А0 | ЭД1 | а01 | P01 | C01 | M01 |
| ЭД2 | а02 | P02 | C02 | M02 | ||
| ЭД3 | а03 | P03 | C03 | M03 | ||
| ПМ | А1 | Гиропривод | а11 | P11 | C11 | M11 |
| Механический редуктор | а12 | P12 | C12 | M12 | ||
| ИМ | А2 | Гидравлический домкрат | а21 | P21 | C21 | M21 |
| Винтовой домкрат | а22 | P22 | C22 | M22 | ||
Таблица 4
Варианты сочетаний подсистем, формирующих электропривод
| № варианта сочетаний подсистем | Сочетания (связки) подсистем |
| 1 | а01 – а11- а21; а01 – а11- а22; а01 – а12- а21 |
| 2 | а01 – а12- а21; а01 – а12- а22; а01 – а11- а22 |
| 3 | а02 – а11- а21; а02 – а11- а22; а02 – а12- а21 |
| 4 | а02 – а12- а21; а02 – а12- а22; а02 – а11- а22 |
| 5 | а03 – а11- а21; а03 – а11- а22; а03 – а12- а21 |
| 6 | а03 – а12- а21; а03 – а12- а22; а03 – а11- а22 |
Таблица 5
Варианты условий для решения
| № вар. | P01 | P02 | P03 | P11 | P12 | P21 | P22 | С01 | С02 | С03 | С11 | С12 | С21 | С22 |
| 1 | 0.83 | 0.82 | 0.92 | 0.8 | 0.85 | 0.80 | 0.85 | 50 | 50 | 75 | 100 | 180 | 100 | 120 |
| 2 | 0.82 | 0.81 | 0.91 | 0.79 | 0.84 | 0.79 | 0.84 | 40 | 48 | 74 | 900 | 170 | 95 | 1100 |
| 3 | 0.83 | 0.82 | 0.92 | 0.8 | 0.85 | 0.80 | 0.85 | 55 | 58 | 77 | 95 | 150 | 110 | 115 |
| 4 | 0.82 | 0.81 | 0.91 | 0.79 | 0.84 | 0.79 | 0.84 | 60 | 65 | 75 | 105 | 140 | 105 | 110 |
| 5 | 0.83 | 0.82 | 0.92 | 0.8 | 0.85 | 0.80 | 0.85 | 50 | 50 | 75 | 100 | 180 | 100 | 120 |
| 6 | 0.82 | 0.81 | 0.91 | 0.79 | 0.84 | 0.79 | 0.84 | 40 | 48 | 74 | 900 | 170 | 95 | 1100 |
| 7 | 0.83 | 0.82 | 0.92 | 0.8 | 0.85 | 0.80 | 0.85 | 55 | 58 | 77 | 95 | 150 | 110 | 115 |
| 8 | 0.82 | 0.81 | 0.91 | 0.79 | 0.84 | 0.79 | 0.84 | 60 | 65 | 75 | 105 | 140 | 105 | 110 |
| 9 | 0.83 | 0.82 | 0.92 | 0.8 | 0.85 | 0.80 | 0.85 | 50 | 50 | 75 | 100 | 180 | 100 | 120 |
| 10 | 0.82 | 0.81 | 0.91 | 0.79 | 0.84 | 0.79 | 0.84 | 40 | 48 | 74 | 900 | 170 | 95 | 1100 |
| 11 | 0.83 | 0.82 | 0.92 | 0.8 | 0.85 | 0.80 | 0.85 | 55 | 58 | 77 | 95 | 150 | 110 | 115 |
| 12 | 0.82 | 0.81 | 0.91 | 0.79 | 0.84 | 0.79 | 0.84 | 60 | 65 | 75 | 105 | 140 | 105 | 110 |
| 13 | 0.83 | 0.82 | 0.92 | 0.8 | 0.85 | 0.80 | 0.85 | 50 | 50 | 75 | 100 | 180 | 100 | 120 |
| 14 | 0.82 | 0.81 | 0.91 | 0.79 | 0.84 | 0.79 | 0.84 | 40 | 48 | 74 | 900 | 170 | 95 | 1100 |
| 15 | 0.83 | 0.82 | 0.92 | 0.8 | 0.85 | 0.80 | 0.85 | 55 | 58 | 77 | 95 | 150 | 110 | 115 |
| 16 | 0.82 | 0.81 | 0.91 | 0.79 | 0.84 | 0.79 | 0.84 | 60 | 65 | 75 | 105 | 140 | 105 | 110 |
| 17 | 0.83 | 0.82 | 0.92 | 0.8 | 0.85 | 0.80 | 0.85 | 50 | 50 | 75 | 100 | 180 | 100 | 120 |
| 18 | 0.82 | 0.81 | 0.91 | 0.79 | 0.84 | 0.79 | 0.84 | 40 | 48 | 74 | 900 | 170 | 95 | 1100 |
| 19 | 0.83 | 0.82 | 0.92 | 0.8 | 0.85 | 0.80 | 0.85 | 55 | 58 | 77 | 95 | 150 | 110 | 115 |
| 20 | 0.82 | 0.81 | 0.91 | 0.79 | 0.84 | 0.79 | 0.84 | 60 | 65 | 75 | 105 | 140 | 105 | 110 |
| 21 | 0.83 | 0.82 | 0.92 | 0.8 | 0.85 | 0.80 | 0.85 | 50 | 50 | 75 | 100 | 180 | 100 | 120 |
| 22 | 0.82 | 0.81 | 0.91 | 0.79 | 0.84 | 0.79 | 0.84 | 40 | 48 | 74 | 900 | 170 | 95 | 1100 |
| 23 | 0.83 | 0.82 | 0.92 | 0.8 | 0.85 | 0.80 | 0.85 | 55 | 58 | 77 | 95 | 150 | 110 | 115 |
| 24 | 0.82 | 0.81 | 0.91 | 0.79 | 0.84 | 0.79 | 0.84 | 60 | 65 | 75 | 105 | 140 | 105 | 110 |
Продолжение табл.5
| № вариантов | М01 | М02 | М03 | М11 | М12 | М21 | М22 | № связки |
| 1 | 50 | 100 | 50 | 100 | 100 | 70 | 80 | 1 |
| 2 | 45 | 90 | 45 | 95 | 96 | 65 | 75 | 1 |
| 3 | 55 | 105 | 55 | 105 | 102 | 75 | 85 | 1 |
| 4 | 54 | 100 | 54 | 102 | 104 | 80 | 80 | 1 |
| 5 | 50 | 100 | 50 | 100 | 100 | 70 | 80 | 2 |
| 6 | 45 | 90 | 45 | 95 | 96 | 65 | 75 | 2 |
| 7 | 55 | 105 | 55 | 105 | 102 | 75 | 85 | 2 |
| 8 | 54 | 100 | 54 | 102 | 104 | 80 | 80 | 2 |
| 9 | 50 | 100 | 50 | 100 | 100 | 70 | 80 | 3 |
| 10 | 45 | 90 | 45 | 95 | 96 | 65 | 75 | 3 |
| 11 | 55 | 105 | 55 | 105 | 102 | 75 | 85 | 3 |
| 12 | 54 | 100 | 54 | 102 | 104 | 80 | 80 | 3 |
| 13 | 50 | 100 | 50 | 100 | 100 | 70 | 80 | 4 |
| 14 | 45 | 90 | 45 | 95 | 96 | 65 | 75 | 4 |
| 15 | 55 | 105 | 55 | 105 | 102 | 75 | 85 | 4 |
| 16 | 54 | 100 | 54 | 102 | 104 | 80 | 80 | 4 |
| 17 | 50 | 100 | 50 | 100 | 100 | 70 | 80 | 5 |
| 18 | 45 | 90 | 45 | 95 | 96 | 65 | 75 | 5 |
| 19 | 55 | 105 | 55 | 105 | 102 | 75 | 85 | 5 |
| 20 | 54 | 100 | 54 | 102 | 104 | 80 | 80 | 5 |
| 21 | 50 | 100 | 50 | 100 | 100 | 70 | 80 | 6 |
| 22 | 45 | 90 | 45 | 95 | 96 | 65 | 75 | 6 |
| 23 | 55 | 105 | 55 | 105 | 102 | 75 | 85 | 6 |
| 24 | 54 | 100 | 54 | 102 | 104 | 80 | 80 | 6 |
Вопросы для защиты отчета
1. Дайте определение системы и расскажите об основные её свойствах: организованность, сложность, целостность, эмерджентность.
2. Сформулируйте три основных принципа системотехники.
3. Расскажите о структуре системы и об основных видах структур.
4. Расскажите о свойствах структуры системы.
5. Расскажите о методах синтеза объектов проектирования.
6. Приведите основные формулировки задач структурного синтеза и методы, которые нашли применение на практике.
7. Расскажите о морфологическом методе структурного синтеза.
8. Расскажите об алгоритме решения задачи структурного синтеза методом динамического программирования.
Литература
1. Ивченко Б.П., Мартыщенко Л.А., Монастырский М.Л. Теоретические основы информационно-статистического анализа сложных систем. – СПб.: Лань, 1997. – 320с.
2. Дружинин В.В., Конторов Д.С. Системотехника. – М.: Радио и связь, 1985. – 200 с.
3. Романов П.С. Математические основы теории систем. Часть 1. Методологические основы системного анализа. Учебное пособие. – Коломна: КИ (ф) МГОУ, 2009. – 98 с.
4. Романов П.С. Математические основы теории систем. Часть 3. Методы и модели принятия решений при проектировании технических систем. Учебное пособие для студентов. – Коломна: КИ (ф) МГОУ, 2009. – 172 с.
5. Романов П.С. Обоснование путей построения автоматизированных систем управления артиллерийскими формированиями на основе новых информационных технологий: Монография. – Коломна: КГПИ, 2005. – 398 с.: ил.
Дата добавления: 2018-06-27; просмотров: 645; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!