Изменение скорости вращения электродвигателя в системе асинхронно-вентильного каскада
Выбираем ранее использованный двигатель 2АК250М8У3.
Скорость холостого хода АД
 .
.
Номинальная скорость АД
 .
.
Номинальный момент АД
 .
.
Критический момент АД
 .
.
Сопротивление рассеяния фазы двигателя рассчитывается по формуле
 ,
,
 .
.

Рисунок 3.1 – Силовая схема установки
· Выбор трансформатора
Среднее напряжение на выходе выпрямительного моста определяется по следующему выражению
 ,
,
где  – линейное напряжение (на разомкнутых кольцах) ротора АД;
– линейное напряжение (на разомкнутых кольцах) ротора АД;
 .
.
Мощность трансформатора
 ,
,




По расчётным параметрам выбирается трансформатор  с параметрами:
с параметрами:
 ,
,  ,
,  .
.

1) 
2) 
3) 
4) 
5) 

|
|
|




· Расчёт потерь мощности:
В каскадных схемах регулирования переменные потери следует выражать через параметры цепи выпрямленного напряжения роторной цепи

где  - активное сопротивление фазы ротора АД;
- активное сопротивление фазы ротора АД;
 - приведенное к цепи ротора активное сопротивление фазы статора;
- приведенное к цепи ротора активное сопротивление фазы статора;
 - активное сопротивление преобразовательных устройств цепи ротора;
- активное сопротивление преобразовательных устройств цепи ротора;
 - падение напряжения на вентилях цепи ротора при прохождении прямого тока.
- падение напряжения на вентилях цепи ротора при прохождении прямого тока.





· Постоянные потери:




· Потери в двигателе:






· Потери в преобразователе:






· Полные потери:












 |




Рисунок 3.2 – Зависимость электрических потерь от скольжения
· КПД при АВК




Реактивная мощность потребляемая АД и преобразовательными устройствами роторной цепи имеет вид
 .
.




|
|
|









· Коэффициент мощности при АВК








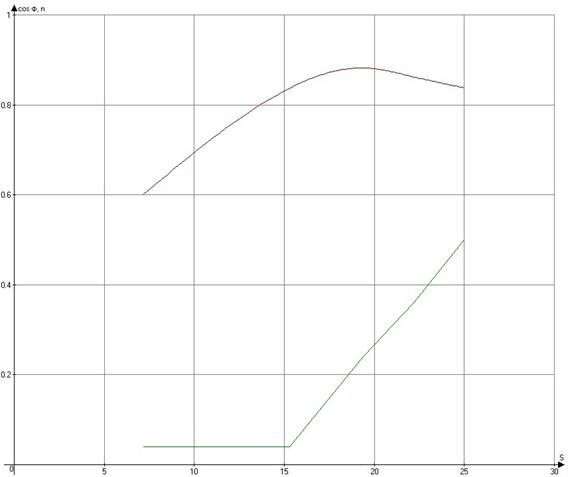
Рисунок 3.3 – Зависимость  от Q и КПД от Q АВК
от Q и КПД от Q АВК

Рисунок 3.4 – Зависимость от Q для всех способов регулирования

Рисунок 3.5 – Зависимость КПД от Q для всех способов регулирования
Вывод
На основании результатов работы делаем вывод – выбор способа регулирования неоднозначен. Каждый из рассмотренных вариантов имеет свои недостатки и преимущества. Значительную трудность при выборе наиболее эффективной схемы электропривода представляет относительно широкий диапазон регулирования производительности. Ни один из способов не даёт преобладающих преимуществ перед другими на всём диапазоне скоростей.
Система с реостатным регулированием является неэкономичным вариантом, так как мощность скольжения рассеивается на реостатах, что приводит к уменьшению КПД. С другой стороны у такой системы есть достоинство: она является малогабаритным и наиболее простым вариантом по сравнению с остальными способами, поскольку регулирование ведется введением сопротивлений в цепь ротора.
В схемах с тиристорным регулятором напряжения и асинхронно-вентильным каскадом присутствуют помимо сопротивлений дополнительные элементы (мостовые схемы включения тиристоров и диодов в инверторе и выпрямители каскада, сглаживающий дроссель, диоды). Это соответственно приводит к необходимости разработки системы управления, а следовательно и увеличению материальных затрат на установки.
|
|
|
ТРН имеет неплохой  , но низкий КПД в сравнении с АВК и реостатным способом регулирования.
, но низкий КПД в сравнении с АВК и реостатным способом регулирования.
Асинхронно-вентильный каскад имеет несколько больший КПД и потребляет меньше активной мощности. С другой стороны, использование трансформатора значительно увеличивает расход реактивной энергии, что негативно сказывается на .
Блиографический список
1. Асинхронные двигатели серии 4А: Справочник/ А.Э Кравчик, М.М. Шлаф, В.И. Афонин, Е.А. Соболенская. – М.: Энергоиздат, 1982. – 504с
2. Ключев В.И., Терехов В.М.”Электропривод и автоматизация общепромышленных механизмов: Учебник для вузов”. - М. Энергия, 1980. 360с.
3. Чиликин М.Г., Сандлер А.С. Общий курс электропривода: Учебник для вузов. – М.: Энергоиздат, 1981. – 576 с.
4. Головёнкин А. Н. Электропривод центробежных насосов механизмов: учебное пособие. – Киров: Издательство ВятГУ, 2004 г. – 105 с.
5. Лалетин В.И. Проектирование тиристорных преобразователей для электроприводов постоянного тока: Учебное пособие для вузов. – Киров: Изд-во ВятГУ, 2006. – 130 с.: ил.
|
|
|
Дата добавления: 2018-06-27; просмотров: 449; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!