Поперечная дифференциальная защита
Принцип действия поперечной дифференциальной защиты рассмотрим на примере сети, представленной на рис.6.3.
По концам каждой из параллельных линий ставятся трансформаторы тока с одинаковыми коэффициентами трансформации. Вторичные обмотки трансформаторов тока соединяются между собой на разность токов. Параллельно вторичным обмоткам включается пусковой орган, выполненный на реле тока и реле мощности.
Рисунок.6.3 Поперечная дифференциальная токовая защита параллельных линий:
а – токовые цепи; б, в – цепи напряжения; г, д – цепи постоянного тока
В нормальном режиме и при внешнем коротком замыкании в точке K1
ток в реле практически отсутствует:
 ,
,
так как токи  и
и  , протекающие по параллельным линиям, равны между собой. Через реле проходит лишь ток небаланса, вызываемый погрешностью трансформаторов тока, и защита не работает.
, протекающие по параллельным линиям, равны между собой. Через реле проходит лишь ток небаланса, вызываемый погрешностью трансформаторов тока, и защита не работает.
При коротком замыкании на одной из защищаемых линий, например, в
точке K2 , через первый комплект проходит ток
 ,
,
а так как ток  , комплект 1сработает. Одновременно сработает комплект 2,поскольку через реле протекает ток
, комплект 1сработает. Одновременно сработает комплект 2,поскольку через реле протекает ток
 .
.
При отключении одной из параллельных линий блок–контактами сработавших выключателей защита выводится из работы для устранения возможности её неселективного действия при внешнем коротком замыкании.
По принципу действия поперечная дифференциальная защита не требует введения замедления на срабатывание, и при коротких замыканиях на защищаемых линиях оба комплекта сработают одновременно и практически мгновенно. Однако при коротких замыканиях в начале или конце линии защита работает каскадно (рис.6.4).
|
|
|

Рисунок.6.4 Каскадная работа поперечной дифференциальной защиты:
а) короткое замыкание в начале линии; б) короткое замыкание в конце линии
При повреждении в начале линии, точка K1, ток  , и ток I1 недостаточен для срабатывания комплекта 2, поэтому выключатель 4отключится только после отключения выключателя 3,когда весь ток повреждения начинает протекать через второй комплект.
, и ток I1 недостаточен для срабатывания комплекта 2, поэтому выключатель 4отключится только после отключения выключателя 3,когда весь ток повреждения начинает протекать через второй комплект.
При повреждении в конце линии, точка K2 , токи, протекающие по линиям, будут примерно одинаковы, поэтому первым работает комплект 2,подаст команду на отключение выключателя 4,и только после этого комплект 1отключит выключатель 2.
Ток срабатывания поперечной дифференциальной защиты выбирается по двум условиям:
· защита не должна работать от максимально возможного тока небаланса при внешних коротких замыканиях;
· защита не должна работать при отключении одной из параллельных линий, если по второй протекает максимальный рабочий ток.
Чувствительностьзащиты определяется по коротким замыканиям на границе зоны каскадного действия и в точке равной чувствительности. За точку равной чувствительности принимается точка короткого замыкания, при замыкании в которой токи в реле обоих комплектов равны. Защита удовлетворяет требованиям чувствительности при  .
.
|
|
|
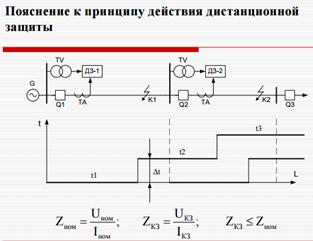
3.7. Область применения и эксплуатационные характеристики дистанционной защиты
Область применения
В сетях сложной конфигурации с несколькими источниками питания МТЗН не обеспечивает селективности действия. В этом случае применяют дистанционную защиту.
Дистанционной называют защиту, выдержка времени которой автоматически изменяется в зависимости от удаленности места КЗ от места установки защиты.
Основным элементом дистанционной защиты является дистанционный орган, определяющий удаленность КЗ от места установки защиты. В качестве такого органа используется реле сопротивления
















3.8. Назначение и виды высокочастотных защит
На линиях электропередач напряжением 110 кВ и выше средней и большой протяжённости (несколько сотен километров) в качестве основной защиты применяются высокочастотные (ВЧ) защиты.Они предназначены для быстрого отключения ЛЭП при КЗ в любой её точке с целью обеспечения устойчивости параллельной работы электрических станций и энергосистем в целом, а также в связи с ростом требований со стороны потребителей для сохранения устойчивости технологического процесса.
|
|
|
ВЧ защиты состоят из двух полукомплектов, расположенных по концам защищаемой ЛЭП. Особенность ВЧ защиты заключается в том, что для их селективного действия необходима связь между полукомплектами защиты, осуществляемая по защищаемой ЛЭП с помощью специального высокочастотного канала.
По принципу своего действия ВЧ защиты не реагируют на КЗ вне защищаемой ЛЭП и поэтому, так же как и дифференциальные токовые защиты, не имеют выдержки времени и являются защитами с абсолютной селективностью. В отечественных энергосистемах применяются два вида ВЧ защит:
· направленные защиты с высокочастотной блокировкой, основанные на сравнении направления полной мощности КЗ по концам защищаемой ЛЭП;
· дифференциально-фазные высокочастотные защиты, основанные на сравнении фаз токов КЗ по концам защищаемой ЛЭП.
Особенностью перечисленных ВЧ защит является наличие двух частей: релейной и высокочастотной.
|
|
|
3.9. Укажите виды защит синхронных генераторов
. Дифференциальная токовая защита генераторов
Основной защитой генераторов от многофазных КЗ в обмотке статора является дифференциальная токовая защита. Эта защита подключается к ТТ, установленным со стороны выводов и со стороны фаз к нулевой точке генератора (рис. 6.5.). На современных генераторах мощностью более 30 МВтс целью повышения надёжности ДТЗ всегда выполняется в трёхфазном исполнении (токовые реле КА1-КАЗ) с соединением групп ТТ в полную звезду.

Рисунок 6.5. Принципиальная схема дифференциальной защиты генератора
На рис. 6.6. приведена схема цепей оперативного тока защиты. При внутренних повреждениях и срабатывании токовых реле защиты одного, двух или трёх подаётся плюс оперативного тока через указательное реле КН на обмотку промежуточного реле KL. Промежуточное реле KL срабатывает, и своими контактами KL.1 и KL.2подаёт плюс оперативного тока через вспомогательный контакт SQ на катушку YAT выключателя Q и на автомат гашения поля (АГП). Для сигнализации обрыва соединительных проводов ДТЗ в нулевой провод токовых цепей включается токовое реле КАО, ток срабатывания которого устанавливается равным  .
.

Рисунок 6.6. Схема цепей оперативного тока
Ток срабатывания ДТЗ выбирается по условию отстройки от тока небаланса, проходящего в токовых реле при внешнем трёхфазном КЗ в точке К:
 , (6.1)
, (6.1)
где  – коэффициент отстройки, принимаемый равным 1,3;
– коэффициент отстройки, принимаемый равным 1,3;  – коэффициент, учитывающий переходный режим (для реле РНТ-565 может быть принят равным 1);
– коэффициент, учитывающий переходный режим (для реле РНТ-565 может быть принят равным 1);  – коэффициент однотипности условий работы ТТ, принимаемый равным 0,5; e– относительное значение полной погрешности ТТ, равное 0,1;
– коэффициент однотипности условий работы ТТ, принимаемый равным 0,5; e– относительное значение полной погрешности ТТ, равное 0,1;  – ток внешнего трехфазного КЗ на шинах генераторного напряжения в точке К, который проходит по ТТ защиты.
– ток внешнего трехфазного КЗ на шинах генераторного напряжения в точке К, который проходит по ТТ защиты.
Коэффициент чувствительности дифференциальной токовой защиты генератора, определяемый по выражению
 . (6.2)
. (6.2)
должен быть не менее двух при минимальном токе двухфазного КЗ на выводах генератора (в зоне защиты), когда последний отключён от сети. Применение в качестве токовых реле РНТ-565 позволяет иметь ток срабатывания защиты по формуле (6.1) не более  .
.
3.10. Защита силовых трансформаторов и автотрансформаторов
Дифференциальная токовая защита трансформаторов
В соответствии с ПУЭ дифференциальная токовая защита обязательно устанавливается на одиночно работающих трансформаторах (автотрансформаторах) мощностью  МВ∙А и на параллельно работающих трансформаторах (автотрансформаторах) мощностью
МВ∙А и на параллельно работающих трансформаторах (автотрансформаторах) мощностью  МВ∙А.
МВ∙А.
ДТЗ применяется в качестве основной быстродействующей защиты трансформаторов (автотрансформаторов). С учётом замыкания внутри обмоток, а также витковых КЗ, когда токи в защите могут быть малы, желательно, чтобы ток срабатывания защиты был как можно меньшим. В настоящее время для мощных дорогостоящих трансформаторов (63 MB∙Аи больше) считается необходимым иметь  ; для трансформаторов меньшей мощности
; для трансформаторов меньшей мощности  , а в некоторых случаях для маломощных трансформаторов при достаточном коэффициенте чувствительности допустим
, а в некоторых случаях для маломощных трансформаторов при достаточном коэффициенте чувствительности допустим  .
.
В настоящее время применяется общая продольная дифференциальная токовая защита. Однако при её выполнении необходимо учитывать схемы соединения обмоток защищаемого трансформатора. Рассмотренные в п.6.1 соотношения токов в схеме ДТЗ справедливы только для трансформаторов, имеющих одинаковые схемы соединения обмоток: Y/Yили D/D. При неодинаковых схемах соединения обмоток, например Y/D, эти соотношения несправедливы. Рассмотрим соотношения токов для наиболее распространенной схемы соединения обмоток Y/D-11 (рис. 6.7, а), принимая, как и в п. 6.1, коэффициент трансформации трансформатора равным единице.
В симметричном нагрузочном режиме, например для фазы А, первичный  и вторичный
и вторичный  токи на стороне треугольника трансформатора Т опережают на угол
токи на стороне треугольника трансформатора Т опережают на угол  соответствующие токи
соответствующие токи  и
и  на стороне звезды (рис. 6.7, б). Угловой сдвиг токов создает большие токи небаланса в ДТЗ, что может привести к ложным или излишним ее срабатываниям. Фазовый сдвиг токов на стороне звезды и треугольника трансформатора Т исключают за счёт различных схем соединения групп ТТ с разных сторон. На стороне звезды трансформатора Т вторичные обмотки ТТ ТА1-ТАЗ соединены в треугольник по 11-й группе, а на стороне треугольника – в звезду (рис. 6.7, а). При этом ток в цепи циркуляции (в плече защиты) на стороне звезды
на стороне звезды (рис. 6.7, б). Угловой сдвиг токов создает большие токи небаланса в ДТЗ, что может привести к ложным или излишним ее срабатываниям. Фазовый сдвиг токов на стороне звезды и треугольника трансформатора Т исключают за счёт различных схем соединения групп ТТ с разных сторон. На стороне звезды трансформатора Т вторичные обмотки ТТ ТА1-ТАЗ соединены в треугольник по 11-й группе, а на стороне треугольника – в звезду (рис. 6.7, а). При этом ток в цепи циркуляции (в плече защиты) на стороне звезды  оказывается смещенным на относительно и совпадает по фазе с током в цепях циркуляции на стороне треугольника
оказывается смещенным на относительно и совпадает по фазе с током в цепях циркуляции на стороне треугольника  (рис. 6.7, б).
(рис. 6.7, б).
 а)
а)

Рисунок 6.7. Принципиальная схема дифференциальной защиты
трансформатора а), векторная диаграмма токов б)
Так как в схеме на рис. 6.7 в симметричном режиме ток в цепи циркуляции и вторичный ток ТТ на стороне звезды трансформатора Т связаны соотношением  , то для получения в цепях циркуляции равных токов (
, то для получения в цепях циркуляции равных токов (  ) коэффициенты трансформации ТТ следует выбирать с учётом следующих соотношений:
) коэффициенты трансформации ТТ следует выбирать с учётом следующих соотношений:



где 


 – номинальные значения напряжений и токов на стороне звезды и треугольника трансформатора Т;
– номинальные значения напряжений и токов на стороне звезды и треугольника трансформатора Т;  – номинальный вторичный ток ТТ (1 или 5 А).
– номинальный вторичный ток ТТ (1 или 5 А).
На рис. 6.8 приведена схема цепей оперативного тока ДТЗ. При внутренних повреждениях и срабатывании одного, двух или трёх реле КА подаётся плюс оперативного тока на обмотку промежуточного реле KL. Промежуточное реле KL срабатывает и подаёт своими контактами KL.1 и KL.2 плюс оперативного тока на отключающие катушки YAT1 и YAT2 приводов выключателей Q1 и Q2 через указательные реле КН1 и КН2 и вспомогательные контакты SQ1 и SQ2.

Рисунок 6.8. Схема цепей оперативного тока
Ток срабатывания ДТЗ трансформатора выбирается по следующим условиям:
1. Намагничивающий ток в нормальном режиме составляет примерно  номинального тока трансформатора и поэтому вызывает лишь некоторое увеличение тока небаланса. При включении трансформатора на холостой ход из-за переходного процесса в обмотке со стороны источника питания может возникать бросок намагничивающего тока, который в первый момент времени в
номинального тока трансформатора и поэтому вызывает лишь некоторое увеличение тока небаланса. При включении трансформатора на холостой ход из-за переходного процесса в обмотке со стороны источника питания может возникать бросок намагничивающего тока, который в первый момент времени в  раз может превышать номинальный ток трансформатора. При расчётах ДТЗ ток срабатывания по условию отстройки от броска намагничивающего тока определяется по формуле
раз может превышать номинальный ток трансформатора. При расчётах ДТЗ ток срабатывания по условию отстройки от броска намагничивающего тока определяется по формуле
 (6.3)
(6.3)
где  – номинальный ток трансформатора;
– номинальный ток трансформатора;  – коэффициент отстройки, который принимается равным
– коэффициент отстройки, который принимается равным  для реле РНТ-565 и 0,3для реле ДЗТ-21.
для реле РНТ-565 и 0,3для реле ДЗТ-21.
2. Для отстройки ДТЗ от тока небаланса при внешнем трёхфазном КЗ её ток срабатывания должен удовлетворять условию
, (6.4)
где – коэффициент отстройки, принимаемый равным 1,3; – коэффициент, учитывающий переходный режим (для реле РНТ-565 может быть принят равным 1); – коэффициент однотипности условий работы ТТ, принимаемый равным 0,5 в тех случаях, когда ТТ обтекаются близкими по значению токами, и равным 1 – в остальных случаях; e = 0,1 – относительное значение полной погрешности ТТ, удовлетворяющее 10%-й кратности;  – наибольший ток внешнего трёхфазного КЗ.
– наибольший ток внешнего трёхфазного КЗ.
Ток срабатывания ДТЗ трансформатора принимается равным большему из двух значений токов срабатывания, определённых по выражениям (6.3) и (6.4). Коэффициент чувствительности ДТЗ трансформатора, определяемый по выражению (6.2), должен быть не менее двух.
3.11. Защита сборных шин
Дифференциальная токовая защита сборных шин
Специальные защиты шин предназначены для отключения без выдержки времени повреждений, возникающих на сборных шинах. На шинах могут возникать такие же повреждения, как и на ЛЭП: однофазные и многофазные КЗ в сетях с заземлённой нейтралью, многофазные в сетях с изолированной нейтралью. Дифференциальная токовая защита сборных шин в настоящее время устанавливается практически на всех электрических станциях и подстанциях напряжением 110 кВ и более, работающих в режиме многостороннего питания.
ДТЗ сборных шин выполняется на тех же принципах, что и рассмотренные выше ДТЗ трансформаторов и генераторов. Токовое реле КА (рис. 6.9, рис.6.10) подключается к соединённым параллельно вторичным обмоткам ТТ, установленным на каждом присоединении. Коэффициенты трансформации всех ТТ равны.

Рисунок 6.9. Распределение токов в цепях дифференциальной защиты шин при КЗ на шинах
При КЗ на шинах в зоне действия защиты шин по всем ЛЭП ток подтекает к месту повреждения в точку К1, в обмотке реле протекает сумма токов от всех ТТ, которая пропорциональна току КЗ  (рис. 6.9):
(рис. 6.9):

При внешнем КЗ на ЛЭП W1 (рис.6.10) в точке К2 сумма токов, подтекающих к шинам по трём ЛЭП W2, W3 и W4, равна току, оттекающему от шин по повреждённой ЛЭП W1.

Рисунок 6.10. Распределение токов в цепях дифференциальной защиты шин при внешнем КЗ
При допущении работы ТТ без погрешности сумма токов в реле КА равна нулю, и реле не действует:

На самом деле при внешнем КЗ в реле КАпроходит ток небаланса, обусловленный разной погрешностью ТТ, включённых в схему защиты. Как уже отмечалось в п.3, погрешность ТТ обусловлена намагничивающим током. Окончательно получаем следующее:

В отличие от ДТЗ генератора ток небаланса в ДТЗ шин определяется не только и не столько различием магнитных характеристик и различием нагрузок  ТТ, но главным образом разными значениями токов, проходящих по повреждённому и неповреждённым присоединениям при внешнем КЗ. Например, при внешнем КЗ в точке К2 по ЛЭП W1 проходит полный ток КЗ
ТТ, но главным образом разными значениями токов, проходящих по повреждённому и неповреждённым присоединениям при внешнем КЗ. Например, при внешнем КЗ в точке К2 по ЛЭП W1 проходит полный ток КЗ  , поэтому намагничивающий ток и, следовательно, погрешность ТТ ТА1 будет существенно выше погрешностей ТТ ТА2-ТА4, через которые проходят определённые доли полного тока КЗ . В результате ток небаланса может достичь большого значения, и его необходимо учитывать в расчётах тока срабатывания реле КА.
, поэтому намагничивающий ток и, следовательно, погрешность ТТ ТА1 будет существенно выше погрешностей ТТ ТА2-ТА4, через которые проходят определённые доли полного тока КЗ . В результате ток небаланса может достичь большого значения, и его необходимо учитывать в расчётах тока срабатывания реле КА.
Ток срабатывания токового тока КА в схеме ДТЗ шин выбирается по двум условиям:
1. Отстройка от максимального тока нагрузки наиболее нагруженного присоединения, что необходимо для предотвращения ложного срабатывания защиты при обрыве токовых цепей:
 , (6.5)
, (6.5)
где  – коэффициент отстройки, равный 1,2;
– коэффициент отстройки, равный 1,2;  – максимальный ток нагрузки наиболее нагруженного присоединения.
– максимальный ток нагрузки наиболее нагруженного присоединения.
2. Отстройка от тока небаланса при внешнем КЗ:
 , (6.6)
, (6.6)
где  – коэффициент отстройки, равный 1,5;
– коэффициент отстройки, равный 1,5;  – коэффициент, учитывающий переходный режим (при использовании реле РНТ принимается равным 1); e – относительное значение полной погрешности ТТ, равное 0,1;
– коэффициент, учитывающий переходный режим (при использовании реле РНТ принимается равным 1); e – относительное значение полной погрешности ТТ, равное 0,1;  – максимальный ток внешнего трехфазного КЗ, проходящий через ТТ защиты. К установке принимается больший из двух токов срабатывания, определённых по формулам (6.5) и (6.6).
– максимальный ток внешнего трехфазного КЗ, проходящий через ТТ защиты. К установке принимается больший из двух токов срабатывания, определённых по формулам (6.5) и (6.6).
Коэффициент чувствительности дифференциальной токовой защиты шин, определяемый по выражению (6.2), должен быть не менее двух.
3.12. Назначение АРВ генераторов. Основные типы возбудителей

3.13. Автоматическое регулирование напряжения и реактивной мощности электростанции




3.14. Автоматическое регулирование напряжение в электрических сетях











3.15. Автоматическое регулирование частоты и активной мощности
Системы автоматического регулирования частоты и активной мощности (АРЧМ) предназначены для:
поддержания частоты в энергообъединениях и изолированных энергосистемах в нормальных режимах согласно требованиям ГОСТ на качество электрической энергии;
регулирования обменных мощностей энергообъединений и ограничения перетоков мощности по контролируемым внешним и внутренним связям энергообъединений и энергосистем;
распределения мощности (в том числе экономичного) между объектами управления на всех уровнях диспетчерского управления (ЕЭС, ОЭС, энергосистемы, электрические станции).
3.3.64.Системы АРЧМ должны обеспечивать (при наличии необходимого регулировочного диапазона) на управляемых электростанциях поддержание среднего отклонения частоты от заданного значения в пределах ±0,1 Гц в десяти минутных интервалах и ограничение перетока мощности по контролируемым связям с подавлением не менее чем на 70 % амплитуды колебаний перетока мощности с периодом 2 мин и более.
3.3.65.В систему АРЧМ должны входить:
устройства автоматического регулирования частоты, обменной мощности и ограничения перетоков на диспетчерских пунктах;
устройства распределения управляющих воздействий от вышестоящих систем АРЧМ между управляемым электростанциями и устройства ограничения перетоков по контролируемым внутренним связям на диспетчерских пунктах энергосистем;
устройства управления активной мощностью на электростанциях, привлекаемых к участию в автоматическом управлении мощностью;
датчики перетоков активной мощности и средства телемеханики.
3.3.66.Устройства АРЧМ на диспетчерских пунктах должны обеспечивать выявление отклонений фактического режима работы от заданного, формирование и передачу управляющих воздействий для диспетчерских пунктов нижнего уровня управления и для электростанций, привлекаемых к автоматическому управлению мощностью.
3.3.67.Устройства автоматического управления мощностью электростанций должны обеспечивать: прием и преобразование управляющих воздействий, поступающих с диспетчерских пунктов вышестоящего уровня управления, и формирование управляющих воздействий на уровнеуправления
электростанций; формирование управляющих воздействий на отдельные агрегаты (энергоблоки);
поддержание мощности агрегатов (энергоблоков) в соответствии с полученными управляющими воздействиями.
3.3.68. Управление мощностью электростанции должно осуществляться со статизмом по частоте, изменяемым в пределах от 3 до 6%.
3.3.69.На гидроэлектростанциях системы управления мощностью должны иметь автоматические устройства, обеспечивающие пуск и останов агрегатов, а при необходимости также перевод агрегатов в режимы синхронного компенсатора и генераторный в зависимости от условий и режима работы электростанций и энергосистемы с учетом имеющихся ограничений в работе агрегатов.
Гидроэлектростанции, мощность которых определяется режимом водотока, рекомендуется оборудовать автоматическими регуляторами мощности по водотоку.
3.3.70.Устройства АРЧМ должны допускать оперативное изменение параметров настройки при изменении режимов работы объекта управления, оснащаться элементами сигнализации, блокировками и защитами, предотвращающими неправильные их действия при нарушении нормальных режимов работы объектов управления, при неисправностях в самих устройствах, а также исключающими те действия, которые могут помешать функционированию устройств противоаварийной автоматики.
На тепловых электростанциях устройства АРЧМ должны быть оборудованы элементами, предотвращающими те изменения технологических параметров выше допустимых пределов, которые вызваны действием этих устройств на агрегаты (энергоблоки).
3.3.71.Средства телемеханики должны обеспечивать ввод информации о перетоках по контролируемым внутрисистемным и межсистемным связям, передачу управляющих воздействий и сигналов от устройств АРЧМ на объекты управления, а также передачу необходимой информации на вышестоящий уровень управления.
Суммарное значение сигналов в средствах телемеханики и устройствах АРЧМ не должно превышать 5 с.
3.16. Автоматическое определение места повреждения в линии
Автоматические локационные искатели (АЛИ) запускаются от пусковых органов релейной защиты. АЛИ производит зондирование, осуществляя заданное число циклов и останавливается, зафиксировав расстояние до места КЗ, раньше начала разрыва дуги в отключающем выключателе поврежденной ВЛ. К автоматическим локационным искателям относится прибор Р5-7. Подключение АЛИ осуществляется к трем .фазам ВЛ. Используются конденсаторы связи и фильтры присоединения для ВЧ каналов связи и релейной защиты. Прибор Р5-7 одновременно обслуживает шесть линий одной подстанции (18 входов).
Неавтоматические локационные искатели (НЛИ) используются на ВЛ и КЛ после неуспешного АПВ и для контроля ВЛ перед включением. Подключение НЛИ к проводам ВЛ осуществляется также через фильтры присоединения и конденсаторы связи ВЧ обработки, что позволяет производить измерения без отключения линии. Измерение расстояния в НЛИ - производится совмещением калибровочных меток на рефлектограмме с отраженным импульсом ручкой управления “РАССТОЯНИЕ.”

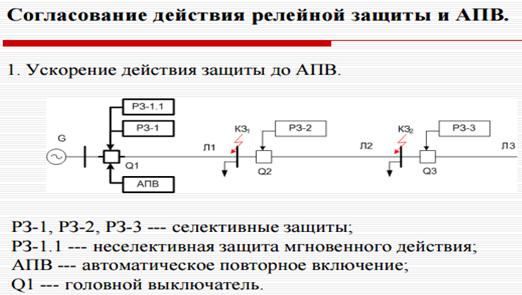
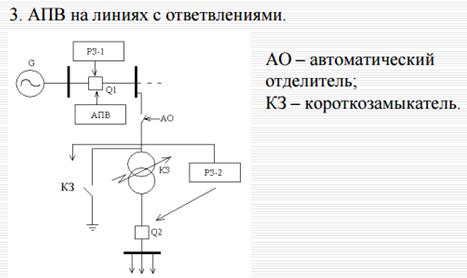
3.17. Назначение АПВ. Классификация и требования к АПВ










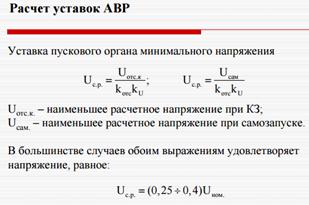
3.18. Назначение АВР. Классификация и требования к АВР







3.19. Назначение АЧР. Принципы построения АЧР








3.20. Автоматика предупреждения нарушения устойчивости
Автоматика предотвращения нарушения устойчивости (АПНУ) энергосистемы — совокупность устройств противоаварийной автоматики, предназначенных для предотвращения нарушения динамической устойчивости при аварийных возмущениях и обеспечения в послеаварийных условиях нормативного запаса статической устойчивости для заданных сечений охватываемого района[1][2][3].
АПНУ представляет собой первый эшелон системы противоаварийной автоматики, обеспечивающий устойчивость энергосистемы. В случае, если нарушение устойчивости все же происходит, подсистема АЛАР обеспечивает прекращение асинхронного режима путем ресинхронизации или деления электрической сети.
Различают централизованную и децентрализованную систему АПНУ. В большинстве случаев (по состоянию на 2009 год) АПНУ выполнена с помощью устройств, действующих децентрализованно, но с развитием противоаварийной автоматики идёт создание и развитие централизованных комплексов
Понятие «управляющее воздействие» (УВ) в литературе имеет две содержательных трактовки [1].
В теории автоматического управления — это сигнал. Анализ особенностей таких «сигнальных» управляющих воздействий показывает, что их смысловое (информационное) содержание полностью определяется параметрами материального носителя, представленного в виде механического, химического, электрического, электромагнитного и т. п. воздействия на объект управления (ОУ). Такое воздействие непосредственно оказывается на объект управления и вызывает (при отсутствии возмущений) однозначную реакцию в изменении значений и параметров, характеризующих состояние ОУ. То есть «сигнал» можно рассматривать в качестве первопричины изменения состояния объекта управления.
В теории систем, это понятие трактуется не только как сигнал, но и как команда, приказ, распоряжение, установка, инструкция, стимул и т. п.[2]. При этом в отличие от «сигнальной» трактовки управляющего воздействия, все другие перечисленные выше варианты смыслового представления УВ предполагают необходимость в предварительном выполнении каких-то дополнительных действий (функций) для представления их, в конечном счете, в виде «сигнального» воздействия —непосредственной причины изменения состояний ОУ. Поэтому смысловое содержание таких УВ вполне обоснованно можно интерпретировать как «задание» системе, содержащей в своем составе объект управления, на выполнение всех необходимых действий для осуществления перевода ОУ в требуемое состояние.
Автоматика ликвидации асинхронного режима (автоматика прекращения асинхронного хода) (АЛАР), (АПАХ) — автоматическая система управления в электроснабжении, является автоматикой энергосистем, поддерживая их устойчивость (глобально).
АЛАР относится к сложным и ответственным системам, обеспечивающим устойчивость энергосистемы в целом. Принципы действия АЛАР различаются по разновидностям пусковых устройств (ПУ):
· Скорости снижения сопротивления (АЛАР ФССС);
Реагирует на характерное для асинхронного режима медленного понижения напряжения и роста тока (на снижение комплексного сопротивления сети с ограниченной скоростью с последующим изменением направления мощности).
· Повышения фазового угла электропередачи (АЛАР ФППУ);
Фиксирует начало асинхронного хода по нарастанию фаз напряжения в контрольных точках сети.
· Циклов асинхронного режима — фиксирования циклов (АЛАР ФЦ);
Фиксирует начало асинхронного хода по циклическим срабатываниям реле сопротивления (или реле максимального тока) и совместных с ним циклов срабатывания и возврата реле активной мощности.
· Фазного тока (АЛАР ФТ).
Типовое устройство АЛАР состоит из нескольких ступеней срабатывания (до трёх), принципы срабатывания ПУ которых различны.
Улавливая возникновение качаний в сети АЛАР отключает часть линий внутри энергосистемы, разделяя их на автономно работающие части, чем обеспечивает восстановление синхронного режима (ресинхронизация). В этом случае АЛАР является разновидностью делительной защиты[1]. При этом АЛАР работает совместно савтоматической частотной разгрузкой (АЧР). После установления нормального режима в разделённых частях происходит включение линий между ними и целостность энергосистемы восстанавливается.
3.21. Автоматическая ликвидация асинхронного режима
Автоматика ликвидации асинхронного режима (автоматика прекращения асинхронного хода) (АЛАР), (АПАХ) — автоматическая система управления в электроснабжении, является автоматикой энергосистем, поддерживая их устойчивость (глобально).
АЛАР относится к сложным и ответственным системам, обеспечивающим устойчивость энергосистемы в целом. Принципы действия АЛАР различаются по разновидностям пусковых устройств (ПУ):
· Скорости снижения сопротивления (АЛАР ФССС);
Реагирует на характерное для асинхронного режима медленного понижения напряжения и роста тока (на снижение комплексного сопротивления сети с ограниченной скоростью с последующим изменением направления мощности).
· Повышения фазового угла электропередачи (АЛАР ФППУ);
Фиксирует начало асинхронного хода по нарастанию фаз напряжения в контрольных точках сети.
· Циклов асинхронного режима — фиксирования циклов (АЛАР ФЦ);
Фиксирует начало асинхронного хода по циклическим срабатываниям реле сопротивления (или реле максимального тока) и совместных с ним циклов срабатывания и возврата реле активной мощности.
· Фазного тока (АЛАР ФТ).
Типовое устройство АЛАР состоит из нескольких ступеней срабатывания (до трёх), принципы срабатывания ПУ которых различны.
Улавливая возникновение качаний в сети АЛАР отключает часть линий внутри энергосистемы, разделяя их на автономно работающие части, чем обеспечивает восстановление синхронного режима (ресинхронизация). В этом случае АЛАР является разновидностью делительной защиты[1]. При этом АЛАР работает совместно савтоматической частотной разгрузкой (АЧР). После установления нормального режима в разделённых частях происходит включение линий между ними и целостность энергосистемы восстанавливается.
Дата добавления: 2018-05-12; просмотров: 2598; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!