Расчет частотных характеристик для САУ
Изменение параметров в системах автоматического регулирования может вызвать неустойчивость. Поэтому при проектировании систем регулирования стремятся обеспечить их устойчивость с некоторой гарантией, так что бы изменение параметров в некоторых пределах не могло привести к неустойчивости. Для этой цели используются понятия запасов устойчивости систем. Различают запас устойчивости по амплитуде (модулю) и по фазе. Запасы устойчивости наиболее удобно определять используя логарифмические частотные характеристики
Передаточная функция разомкнутой исходной системы имеет вид:
 (5)
(5)
Построим логарифмические частотные характеристики (Рисунок 15)
>> w=tf([0.018768 0.552],[0.00011 0.000150392 0.10811 0.119 0])
Transfer function:
0.01877 s + 0.552
--------------------------------------------------
0.00011 s^4 + 0.0001504 s^3 + 0.1081 s^2 + 0.119 s
>> bode(w)
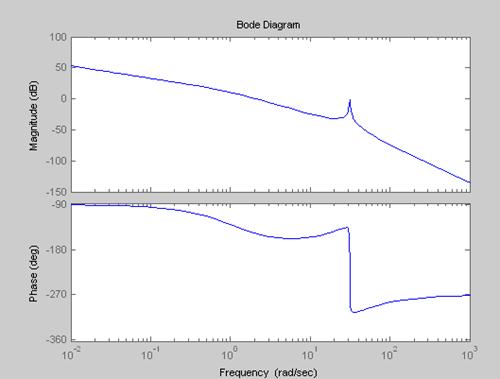
 Рисунок 15.-Диаграмма Боде
Рисунок 15.-Диаграмма Боде
Чтобы построить переходную характеристику (Рисунок 16) воспользуемся командой:
>> step(w)
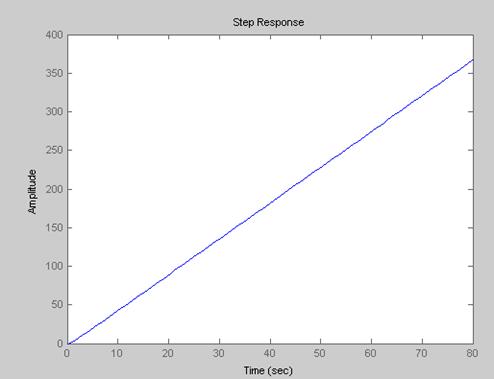
Рисунок 16.- Переходная характеристика
2.8 Выявление систематических ошибок
Передаточная функция по ошибке от управления:
 (8)
(8)
Передаточная функция по ошибке от возмущения:
 (9)
(9)
Для определения точности мы воспользовались методом систематических ошибок. Так как воздействие по каналу управления и возмущения постоянны, для определения величины εуст(t) в установившемся режиме необходимо определить коэффициенты статических ошибок по этим каналам, на основании передаточных функций ошибок, необходимо найти лишь первые коэффициенты ошибок согласно выражений:
Со=Wε(Р)|S=0 (10)
Сof=Wfε(P)|S=0 (11)
Для этого приравняли р=0, в выражениях Wε(p) и Wfε. Так как числитель этих выражений имеет множитель в виде р, то соответственно и коэффициенты ошибок Со=0; Сof=0, а соответственно ошибка
εуст(t)=Со*X(t)+Cоf*f(t)=0 (12)
Таким образом САУ не имеет ошибки в установившемся режиме.
Конструктивные расчёты регулятора скорости.
Для проектируемого электропривода выбираем однократную систему регулирования скорости. Однократная САР скорости по сравнению с двукратной не обладает астатизмом по возмущающему воздействию (моменту сопротивления), однако для проектируемой системы обеспечение такого астатизма не требуется. Однократная САР скорости обладает лучшими динамическими свойствами по сравнению с двукратной САР. Для разгона или торможения привода задатчик интенсивности формирует линейно изменяющийся во времени сигнал задания на скорость. Синтезировали ПИ - регулятор скорости с помощью Matlab (Рисунок 17).
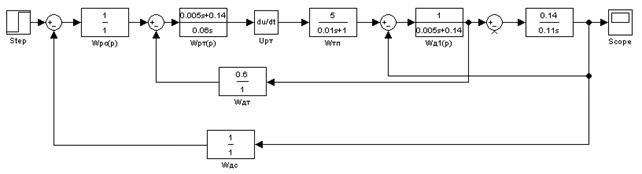
Рисунок 17.-Схема регулятора скорости
3. Охрана труда. Средства защиты в электроустановках.
Электрозащитные средства — это средства защиты, которые применяют от поражения электрическим током, необходимые для обеспечения эффективной электробезопасности при работах в распределительных устройствах.
Все электрозащитные средства делятся на 2 группы:
· основные
· дополнительные
Основные электрозащитные средства — это изолирующие электрозащитные средства, у которых изоляция долгое время способна выдерживать рабочее напряжение сети, и с помощью которых разрешено производить работы под напряжением на токоведущих частях.
Дополнительные электрозащитные средства — это изолирующие электрозащитные средства, которые не защищают человека от поражения электрическим током, а только являются дополнением к основным средствам защиты. А также они предназначены для защиты работающего от шагового напряжения и напряжения прикосновения.
 |
По классу напряжения электрозащитные средства разделяются:
· до 1000 (В)
· выше 1000 (В)
Основные электрозащитные средства выше 1000 (В)
Приведем перечень всех изолирующих электрозащитных средств, относящихся к категории основные выше 1000 (В).
· различные изолирующие штанги
· изолирующие клещи
· указатели высокого напряжения
· различные устройства для электрических измерений и испытаний в распределительных устройствах (указатели напряжения для фазировки, устройства для прокола кабелей, электроизмерительные клещи и другое)
· различные устройства и специальные средства защиты, необходимые для работ в электроустановках выше 110 (кВ), сюда не относятся штанги для выравнивания и переноса потенциала
Основные электрозащитные средства до 1000 (В)
Приведем перечень всех изолирующих электрозащитных средств, относящихся к категории основные до 1000 (В).
· изолирующие штанги
· изолирующие клещи
· указатели низкого напряжения (УНН, Контакт-55ЭМ)
· электроизмерительные клещи
· диэлектрические перчатки
· ручной инструмент (изолирующий)
Дополнительные электрозащитные средства выше 1000 (В)
Приведем перечень всех изолирующих электрозащитных средств, относящихся к категории дополнительные выше 1000 (В).
· диэлектрические перчатки
· диэлектрические боты
· диэлектрический коврик
· изолирующая подставка
· изолирующие колпаки и накладки
· штанги для выравнивания и переноса потенциала
· изолирующие стеклопластиковые (диэлектрические) стремянки и приставные лестницы
Дополнительные электрозащитные средства до 1000 (В)
Приведем перечень всех изолирующих электрозащитных средств, относящихся к категории дополнительные до 1000 (В).
· диэлектрические галоши
· диэлектрический коврик
· изолирующая подставка
· изолирующие колпаки, покрытия и накладки
· штанги для выравнивания и переноса потенциала
· изолирующие стеклопластиковые (диэлектрические) стремянки и приставные лестницы
Средства защиты от электрических полей
Вторым видом средств защит являются средства защиты от электрических полей повышенной напряженности.
К ним относятся:
1. Индивидуальный экранирующий комплект — необходим для выполнения работ на потенциале земли в ОРУ (открытом распределительном устройстве) и на потенциале ВЛ (воздушной линии электропередачи)
| |
2. Различные экранирующие устройства (переносные и съемные)
3. Плакаты и знаки безопасности:
· запрещающие
· предупреждающие
· предписывающие
· указательный
4. Переносное заземление
Средства индивидуальной защиты.
К ним относятся:
· защитные пластиковые каски
· защитные очки
· щиты ограждения
· различные респираторы и противогазы
· рукавицы
· предохранительные пояса и страховочные канаты
· комплекты для защиты работающего от электрической дуги — термостойкие костюмы
Заключение.
В курсовом проекте было произведено исследование автоматизированного электропривода постоянного тока, с целью синтеза последовательного корректирующего устройства регулятора скорости. Синтез был произведён с использованием метода логарифмических частотных характеристик, для чего были построены частотные характеристики. В результате был синтезирован ПИ- регулятор скорости. Затем для исследования устойчивости и качества динамических процессов скорректированная система была промоделирована с использованием пакета прикладных программ Matlab – Simulink.
В результате на основании полученной диаграммы Найквиста было определено, что данная система устойчива. Далее по ЛАЧХ и ФЧХ системы были определены запасы по амплитуде. Данные запасы достаточны для обеспечения качественных показателей. Затем были получены реакции системы на управляющее воздействие ωЗ(t)=1t, по которому были определены качественные показатели. Данные результаты соответствуют заданным. При проверке реакции системы на входной сигнал от задатчика интенсивности, было определено что данная система является системой со вторым порядком астатизма так как отсутствует статическая и кинетическая ошибка, а присутствует только динамическая ошибка в начале и конце переходного процесса.
Так же были получены переходные процессы реакции системы на возмущающее воздействие i(t), ω(t) от тока нагрузки iC(t)=1(t). По определённым в результате синтеза параметрам регулятора было произведено определение параметров аналового регулятора на базе операционного усилителя.
Вывод: несмотря на простоту синтеза последовательного корректирующего устройства , он даёт приемлемые для практических расчётов результаты, что показало моделирование скорректированной
 |
системы в пакете прикладных программ Matlab – Simulink
 Список использованных источников
Список использованных источников
1. Анисимов В.И., Сборник примеров и задач по линейной теории автоматического регулирования [Текст]/ В.И. Анисимов,. - М.: Госэнергоиздат, 1959. -114с
2. Бабаков, Н.А., Воронов, А.А.Теория автоматического управления [Текст]: учебник для вузов /Н.А. Бабаков, А.А. Воронов ; под ред. А.А. Воронова. - М.: Высш. шк., 1986. - 367с., ил.
3. Егоров, К.В. Основы теории автоматического регулирования [Текст]: учебное пособие для вузов/ К.В. Егоров ;- М.: "Энергия", 1989. - 648с., ил.
4. Зайцев, П.В., Теория автоматического управления [Текст]: учеб. пособие для электротехн. спец. вузов/ П.В. Зайцев - М.: "Дрофа", 2008. - 329с., ил.
5. Коротков, В.Ф., Основы линейной теории автоматического управления в задачах электроэнергетики [Текст]: Учебное пособие к компьютерным лабораторным практикумом АОС-ТАУ/ В.Ф. Коротков; Иван. гос. энерг. ун-т. - Иваново, 2004. - 392с.
6. Черных И.В., Моделирование электротехнических устройств в MATLAB, SimPowerSystems и Simulink 1-е издание [Текст]: обучающее пособие/ И.В. Черных - М.: "Дрофа", 2007.,-288 с., ил.
7. [Электронный ресурс] /
http://www.studfiles.ru/dir/download/10056.html
8. [Электронный ресурс] /
http://window.edu.ru/window/library?p_rid=44851
9. [Электронный ресурс]/
http://www.wtu.ru/structure/kaf/rusyaz/kurs/rus_int.php
10. [Электронный ресурс]/
http://dic.academic.ru/dic.nsf/bse/61302/Автоматика
Дата добавления: 2018-05-12; просмотров: 235; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!