Особенности различных типов архитектур биус
Nbsp; Аннотация Листунов Л. Н.,Организация бортовой информационно – управляющей системы – Челябинск: ЮУрГУ, АТ, П-410;2018, 82 с. Аннотация (в соответствии с ГОСТ 7.0-99) включает: характеристику основной темы; проблемы объекта; цели (и задачи) работы; результаты работы; новизну работы в сравнении с другими, родственными по тематике и целевому назначению. БИУС автомобилей позволяет решить множество дополнительных задач оптимизации режимов работы агрегатов автомобиля, обеспечить большую безопасность движения, решить задачи контроля и текущего диагностирования состояния агрегатов и систем автомобиля Целью данной работы является исследовать различных архитектур, применяемых в БИУС. Поставленные задачи: 1. Изучить виды и типы архитектур БИУС, определить их особенности. 2. Исследовать влияние особенностей различных архитектур на потребительские свойства. 3. Определить пригодность той или иной архитектуры к соответствующим задачам. 4. Определить перспективные направления развития БИУС. Оглавление введение. 8 1 Особенности различных типов архитектур биус.. 10 1.1 Элементы системы. 10 1.2 Структурная и логическая организация БИУС.. 12 1.3 Структурная схема БИУС.. 16 1.4 Классификация (типы) бортовых систем автотранспортного средства 26 1.4.1 Бортовые системы интеллектуального транспортного средства 26 1.4.2 Системы информирования водителя. 28 1.4.3 Cистема сбора и передачи информации. 30 2 Виды биус, классификиция, примеры.. 32 2.1 Классификация современных ботовых электронных систем автомобилей. 32 2.2 Электронные системы управления автомобилем. 33 2.2.1 Антиблокировочная тормозная система автомобиля. 33 2.2.2 Противобуксовочная система автомобиля. 34 2.2.3 Система управления курсовой устойчивостью автомобиля. 37 2.2.4 Система автоматического управления трансмиссией автомобиля. 42 2.2.5 Система автоматического управления подвеской автомобиля 43 2.3 Специализированные бортовые системы автомобиля. 45 2.3.1 Электронные противоугонные системы автомобиля. 45 2.3.2 Системы бортовой самодиагностики автомобиля. 53 2.3.3 Климат-контроль. 57 2.3.4 Круиз-контроль. 57 2.3.5 Бортовой компьютер. 58 2.4 Автомобильные мультиплексные системы передачи информации. 59 3 перспективные направления развития БИУС.. 73 Заключение. 80 библиографический список.. 81 Приложения.. 82 введение Разноοбразные вычислительные устройства успешно используются практически во всех технически слοжных изделиях с целью упрощения организации интерфейса. В этом смысле не являются исключением изделия транспортных отраслей: автомобильной, железнодорожной, аэрокосмической, морской и других. Современные образцы оказываются насыщенными различными вычислительными устройствами, в том числе объединёнными в единый комплекс. Подобное объединение вычислительных устройств отдельного объекта в единый программно-аппаратный комплекс часто называют бортовой информационно-управляющей системой (БИУС) БИУС — вид автоматизированной системы управления, предназначенной для автоматизации рабочих процессов управления, диагностики, сбора, обработки и отображения информации на транспортных средствах. БИУС облегчает управление и упрощает эксплуатацию сложных систем, выполняя за водителя часть функций. Чаще всего БИУС представляет собой распределённую вычислительную сеть для жёстких условий эксплуатации (широкий температурный диапазон, вибрация, удары и другие воздействия), объединяющую центральный процессорный блок и периферийные контроллеры различных агрегатов автомобиля: ДВС, АБС, управление КПП, предпусковым подогревателем, управление подкачкой колёс и т. д. В качестве физической среды передачи информации в БИУС наиболее широко используется CAN в виде дифференциальной витой пары. Это обусловлено фактическим доминированием в настоящее время данного стандарта промышленной сети в автомобильной технике. Цель работы: Исследовать особенности различных архитектур, применяемых в БИУС. Задачи: - Изучить виды и типы архитектур БИУС, определить их особенности. - Исследовать влияние особенностей различных архитектур на потребительские свойства. - Определить пригодность той или иной архитектуры к соответствующим задачам. - Определить перспективные направления развития БИУС.
|
|
|
|
|
|
|
|
|
Особенности различных типов архитектур биус
Элементы системы.
«Бортовая информационно-управляющая система (БИУС) транспортного средства (ТС) – это комплекс автоматической оценки состояния автомобиля и его агрегатов, оценки параметров движения, для информирования водителя οб этих состояниях и выработки управляющий воздействий на исполнительные механизмы автомобиля в процессе выполнения различных задач.
Принцип работы БИУС– сигналы с датчиков, установленных на ТС, поступают в вычислитель, который формирует заключение и выдает его в виде информации ο состоянии контролируемого объекта водителю и автоматическим исполнительным системам.
По своей структуре бортовая информационно-вычислительная система должна состоять из:
|
|
|
1) датчиков, воспроизводящих диагностическую информацию от объекта диагностирования;
2) преобразователей, принимающих сигналы от датчиков и преобразующих их в вид, удобный для дальнейшей обработки;
3) устрοйств οбрабοтки информации, которые провοдят оценку полученных данных диагностирования по заданной программе и выдают конечные результаты в виде электронных сигналов;
4) устрοйств выдачи информации, фиксирующих результаты диагностирования на нοсителе инфοрмации»[1].
«Для оценки состояния и поведения транспортного комплекса используется информация, получаемая датчиков, аналоговых и импульсных типов, имеющих различные диапазоны измерения. Многие датчики имеют нелинейную характеристику. Также используются дискретные датчики, чаще всего релейного типа.Для подключения датчиков к микропроцессорам/контроллерам, выполняющим сбор и обработку информации с датчиков,а так же формирующие информационные сообщения и управляющие воздействия на исполнительные механизмы, необходимо выполнить обработку сигналов. К обработке сигнала относится нормирование сигнала, т.е. приведение его к определенному значению, фильтрация, линеаризация, аналогово-цифровое преобразование и другие виды обработки.
Из анализа возможных схем построения БИУС можно сделать вывод о целесообразности использования мехатронных модулей (ММ). Каждый ММ выполняется в виде законченного модуля, содержащего непосредственно первичный преобразователь (датчик), устройство преобразования сигналов и вычислитель. Для управления исполнительными устройствами так же создается модуль, в состав которого входит вычислитель, усилитель-преοбразователь и испοлнительный механизм.
Структурные схемы ММ показаны на рисунке 1.1. Каждый модуль выполняется в виде специализированного контроллера, который содержит вычислительное устройство и преобразователь.

Рисунок 1.1 – Мехатрοнные модули.
При использовании дискретных датчиков не требуется сложных преобразований, и поэтому, рационально их подключить к ММ, который физически расположен ближе к дискретному датчику. Это потребует использование контроллера с несколькими входами» [1].
В общем случае все ММ автомобиля по функциональному назначению могут быть отнесены к следующим основным группам:
- системы управления двигателем;
- системы управления трансмиссией и агрегатами;
- системы управления ходовой частью, в том числе и тормозными системами;
- системы управления оборудованием кабины;
- системы диагностики/самодиагностики узлов агрегатов автомобиля.
Использование концепции ММ позволяет в значительной степени абстрагироваться в процессе проектирования сложного объекта (БИУС) от исполнительной и информационных частей (считая, что они компонуются из готовых блоков – мехатрοнных модулей), а сосредоточить основное внимание на разработке компьютерного управления.
1.2 Структурная и лοгическая οрганизация БИУС
«Транспортные средства нуждаются в целом комплексе систем управления, который обеспечивает надежность эксплуатации, безопасность движения и т.д. Использование датчиков и различных исполнительных механизмов, распределенных по автомобилю, в совокупности с бортовыми микропроцессорами и конроллерами, объединенных в многоуровневую систему управления, может решить многие проблем оптимизации и адаптации режимов функционирования важнейших агрегатов автомобиля» [1].
Обобщенная структурная схема информационно-управляющей системы, реализующей многоуровневое управление, приведена на рисунке 1.2.1.
Распределение функций управления по уровням (сценарий, ситуационный, локальный)возможно осуществитьcпомощью программы.

Рисунок 1.2.1 – Обобщенная структурная схема БИУС.
С учетом большого объема данных, передаваемых через CAN-интерфейс автомобиля в реальном времени, требований высокой надежности и безопасности функционирования очевидно необходимо использование совокупности шин данных (рисунок 1.2.2).

Рисунок 1.2.2 – Архитектура сетевого интерфейса БИУС.
На рисунке 1.2.2 применены следующие обозначения: ЦБУ – центральный блок управления, БАФ – блок (библиотека) автомобильных функций; Бди – ММи – мехатронные модули измерительной/диагностирующей системы; ММдв – мехатронные модули двигателя; ММдR – мехатронные модули системы диагностики; ММаN, F – модули агрегатов автомобиля; ММ п/с Р – модули подсистем автомобиля; ММтI, L – мехатронные модули тормозной системы; ММ тормсист – головной ММ тормозной системы; ММ АКПП – модуль автоматической коробки переключения передач.
«Логически организация БИУС автомобиля может быть различной. Но, очевидно, что структура с центральной (однопроцессорной) организацией вряд ли возможна из-за большой сложности системы, многофункциональности, повышенных требований по надежности функционирования, требований к быстродействию и т.д.
Использование в БИУС иерархической организации, когда в систему входит один центральный процессор и ряд подчиненных к нему процессоров, дает целый ряд преимуществ: распараллеливание решения задач управления позволяет существенно повысить быстродействие; обеспечивают возможность управления сложными объектами (агрегатами автомобиля) в режиме реального времени; обеспечивает более высокую надежность системы.
Но вместе с этим, усложняется процедура решения задач управления: возникают сложности распределения общей задачи на ряд отдельных подзадач, сложности увязки этих подзадач между собой; сложности создания алгоритмического и программного обеспечения такой иерархической системы управления.
Развитие компьютерных и сетевых технологий позволяет в настоящее время перейти к созданию децентрализованных распределенных систем компьютерного управления, которые представляю собой множество полностью равноправных процессоров, объединенных в единую систему управления с помощью сетевого канала связи.
Такая организация БИУС имеет ряд преимуществ: отсутствует центральный процессор, выход которого из строя приводит к отказу всей информационно-управляющей системы; отказ любого процессора не приводит к катастрофическим последствиям – задачи, решаемые отказавшим процессором, могут быть перераспределены/размещены на работоспособных процессорах. Таким образом, помимо параллельности решения задачи управления, такая БИУС будет обладать высокой надежностью. Обмен информацией между отдельными подсистемами БИУС, датчиками и исполнительными механизмами может осуществляться по стандартным сетевым протоколам обмена» [1].
Структурная схема БИУС
«Для оценки состояния и поведения транспортногосредства используется информация, получаемая со следующих датчиков, расположенных на машине:
- датчики давления измеряют давление масла в КПП, ДВС, гидросистеме, пневмосистеме;
- датчики температуры для измерения температуры охлаждающей жидкости ДВС, масла в ДВС, охлаждающей жидкости в компрессоре, масла в гидросистеме.
Перечисленные датчики являются аналоговыми и имеют различные диапазоны измерения. Многие датчики имеют нелинейную характеристику. Используются дискретные датчики, работающие в качестве сигнализаторов, например, сигнализатор критической температуры охлаждающей жидкости, аварийного давления масла и другие, концевые выключатели главного фрикциона, горного тормоза, вентилятора. Еще один тип датчиков – импульсные датчики, формирующие последовательность импульсов, например для контроля пройденного пути.
В качестве БИУС используется бортовой компьютер (вычислитель), выполняющий сбор и обработку информации с датчиков, а также формирующий информационные сообщения и управляющие воздействия на исполнительные механизмы. Для подключения датчиков к вычислителю необходимо выполнить обработку сигналов. К обработке сигналов относятся нормирование сигнала (усиление), т.е. приведение его к определенному значению, фильтрация, линеаризация, аналого-цифровое преобразование и другие виды обработки» [2].
Структурная схема БИУС приведена на рисунке 1.3.1.

Рисунок 1.3.1
Приведенная система обладает недостатком – вычислитель слишком перегружен, так как очень много времени тратиться на формирование информационных сообщений, что может привести к потере информации с датчиков в критических ситуациях. Поэтому предлагается разделить функции сбора и обработки информации с датчиков и формирования информационных сообщений на два вычислителя.
«Структурная схема БИУС, содержащая систему сбора и обработки информации и систему отображения информации, приведена на рисунке1.3.2.
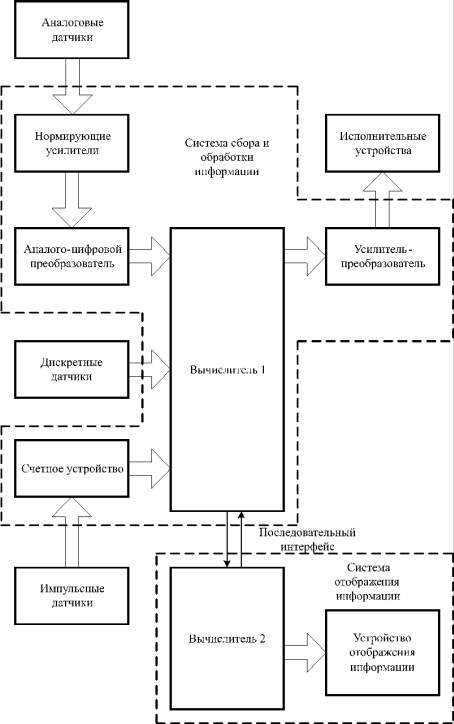
Рисунок 1.3.2 –БИУС с двумя вычислителями
Такой подход к построению бортовой информационно-управляющей системы также имеет недостатки, относящиеся к топологии системы.
Многочисленные датчики расположены на машине в различных точках. Это приводитк сложной организации разводки кабельного оборудования. Многие датчики имеют слабый сигнал, и при прокладке кабеля на большое расстояние происходит ослабление сигнала и засорение его помехами, наводками. Кроме того, система имеет невысокую надежность. При обрыве кабеля информация с датчика полностью теряется или вычислитель может понять отсутствующий сигнал за исправный, что приводит к аварийным ситуациям.
Для решения такой задачи предлагается другой подход к построению БИУС. Каждый датчик выполняется в виде законченного мехатронного модуля, содержащего непосредственно первичный преобразователь (датчик), устройство преобразования сигнала и вычислитель. В классе мехатронных устройств – так называемые МЕМCы.МЭМС–микроэлектромеханические системы — устройства, объединяющие в себе микроэлектронные и микромеханические компоненты. Для управления исполнительными устройствами также создается модуль, в состав которого входит вычислитель, усилитель-преобразователь и исполнительный механизм.
Структурные схемы модулей показаны на рисунке1.3.3. Каждый модуль выполняется в виде контроллера, который содержит вычислительное устройство и преобразователь» [2].

Рисунок1.3.3 –Модули преобразователей
«Для связи модулей преобразователей с главным бортовым компьютером каждый модуль должен иметь последовательный интерфейс связи, например RS-485, USB или CAN. CAN-интерфейс постепенно становится стандартом для распределенных систем управления на транспорте, в автомобильной технике и робототехнике. Можно также использовать интерфейс SERCOS, разработанный для цифровых следящих приводов и представляющий собой локальную кольцевую оптоволоконную сеть.
Структурная схема информационно-управляющей системы, построенной с использованием автономных модулей, приведена на рисунке 1.3.4. Все модули объединены в бортовую двухпроводную или однопроводную сеть. Дублирование линий связи позволяет повысить надежность такой системы»[2].
Такой подход может привести к существенному удорожанию информационно-управляющей системы. Этого не происходит, так как каждый вычислитель предназначен для выполнения узкоспециализированных задач и выполняется на недорогих контроллерах.

Рисунок1.3.4 –БИУС на автономных модулях
«Еще одним видом организации БИУС является использование программируемых логических интегральных схем –ПЛИС.
ПЛИС представляет собой микросхему, содержащую множнество несоединённых логических вентилей И/ИЛИ, которые с помощью специальных программных средств могут быть настроены и электрически сконфигурированы для выполнения специфических аппаратных функций.
Устройства на базе ПЛИС обладают реконфигурируемой цифровой архитектурой, включающей в себя матрицу конфигурируемых логических блоков, окруженных периферийными блоками ввода/вывода. В пределах матрицы ПЛИС возможна произвольная маршрутизация сигналов посредством управления программируемыми переключателями и коммутирующими линиями. Цепи ПЛИС представляют собой реконфигурируемую счетную машину, осуществляющую параллельную обработку данных и исполняющую приложения на аппаратном уровне микросхемы. Можно разработать на базе ПЛИС свои собственные схемы управления и сбора данных с тактированием и синхронизацией процессов с точностью до 25 нс. Благодаря возможности параллельной обработки данных, заложенной в ПЛИС, добавление новых вычислений в программу, исполняемую на микросхеме, не приводит к уменьшению скорости исполнения приложений.
Реконфигурируемая ПЛИС в сочетании с процессором реального времени, а вместе это –Compact RIO, позволяют создавать автономные встраиваемые и распределенные приложения, а также промышленные модули ввода/вывода со встроенным согласованием сигналов, возможностью прямого подключения датчиков и поддержкой горячего подключения.
ПЛИС обладает встроенными механизмами передачи данных во встроенный процессор реального времени для их последующего анализа, обработки и сохранения, а также для связи с внешними устройствами. При этом каждый из модулей ввода/вывода содержит в себе встроенные разъемы, систему согласования сигналов, цепи преобразования (такие как ЦАП и АЦП), также изоляционные барьеры. Поддержка расширенного диапазона напряжений и различных промышленных типов сигналов позволяет напрямую подключить к модулям датчики и управляемые устройства.
Благодаря своей невысокой стоимости, надежности и пригодности для использования в широком классе встраиваемых контрольно-измерительных приложений, Compact RIO может применяться практически во всех отраслях промышленности. Так, на базе систем Compact RIO решаются такие задачи, как групповое управление, дискретное управление, управление движением, бортовые измерения, мониторинг состояния машин, быстрое прототипирование управляющих систем, промышленные системы управления и сбора данных, распределенные системы управления и сбора данных, мобильный/портативный анализ шумов, вибраций и т.д.
В частности, ориентированная на создание пользовательских приложений технология RIO позволяет, например, создать аппаратную систему управления шаговым или сервоприводом, используя ПЛИС для расшифровки сигналов с тахометра или с квадратурного энкодера с целью проведения измерений координаты и скорости.
Появление устройств с поддержкой реконфигурируемого ввода/вывода существенно расширяет возможности технологии приборов. Для программирования устройств с технологией RIO применяется программная среда LabVIEW, которая позволяет разрабатывать аппаратную часть контрольно-измерительных систем, идеально настроенных для решения специфических задач.
К информационным и вычислительным ресурсам системы диагностики и контроля предъявляется ряд требований. Основной задачей всех измерительных систем является измерение и/или генерация реальных физических сигналов. В процессе сбора данных физические величины, такие, как напряжение, ток, давление и температура преобразуют в цифровой формат и вводят их в компьютер. Распространенные методы сбора данных реализуются с помощью встраиваемых в компьютер устройств и автономных измерительных приборов, приборов, поддерживающих интерфейс GPIB, систем стандарта PXI (расширение PCI для измерительной техники) и приборов с портом RS-232.
GPIB (GeneralPurposeInterfaceBus) - стандартная шина, предназначенная для управления электронными измерительными приборами с помощью компьютера. Ее также называют IEEE 488, поскольку ее характеристики определяются стандартами ANSI/IEEE 488-1978, 488.1-1987, 488.2-1992. Максимальное расстояние между любыми двумя приборами - 4 м, среднее расстояние между приборами по всей шине - 2 м. Максимальная (общая) длина кабеля - 20 м. К каждой шине подключается максимум 15 приборов, причем не менее двух третей из них должны быть включены»[2].
Прежде чем компьютерная измерительная система сможет измерить некоторую физическую величину, например, температуру, физический сигнал с помощью датчика или измерительного преобразователя должен быть преобразован в электрический - ток или напряжение. Под преобразованием сигналов следует понимать процесс предварительной обработки сигналов с целью улучшения точности измерений, качества изоляции цепей (развязки), фильтрации и т.д.
Чтобы измерять сигналы с датчиков, необходимо преобразовать их в форму, которую может воспринять устройство аналого-цифрового преобразования. Например, у большинства термопар выходное напряжение очень мало и соизмеримо с шумом. Следовательно, перед оцифровкой такого сигнала его необходимо усилить. К другим разновидностям преобразования сигналов относятся линеаризация, возбуждение датчика, развязка.
На рисунке 1.3.5 показаны некоторые распространенные типы датчиков и сигналов и требуемые для них виды преобразования.
Таким образом, наиболее целесообразно строить информационно-управляющую систему на основе автономных модулей. В качестве измерительных устройств текущих параметров следует применять интеллектуальные датчики (МЭМСы).
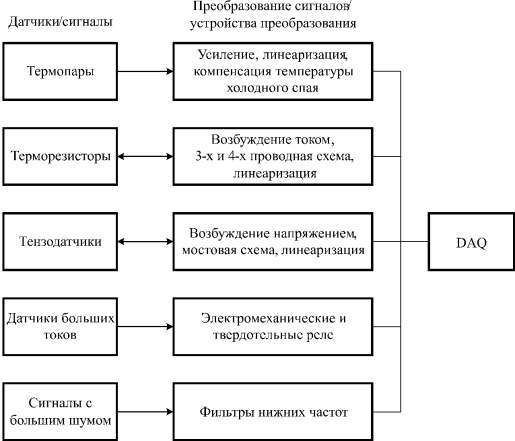
Рисунок1.3.5 – Типы датчиков и сигналов и виды преобразования
Бортовая сеть должна быть в варианте одно или двухпроводной или на оптоволоконной линии передачи. Учитывая специфику транспортного средства в части характера выполняемых работ и безопасности экипажа, линия связи должна быть резервирована (в простейшем варианте дублирование по бортам)[2].
Дата добавления: 2018-05-12; просмотров: 258; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!