Автоматизации нефтяной скважины Станок-качалок
Схема автоматизации нефтяной скважины, оборудованной глубиннонасосной установкой типа СКН, показана на рис.
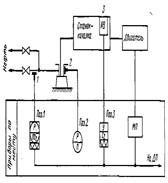
Схемой предусмотрено оснащение установки блоком управления 1, инерционным магнитным выключателем ИМВ-1М-2 и электроконтактным манометром типа ВЭ-16РБ-3. Системой автоматизации обеспечивается автоматическое управление электродвигателем станка-качалки при аварийных режимах: отключение при срыве штанг и поломках редуктора, при токовых перегрузках, коротких замыканиях и обрывах фаз, отключение электродвигателя по импульсу от электроконтактного манометра при аварийных ситуациях на групповой установке и индивидуальный самозапуск станка-качалки после перерыва в снабжении электроэнергией. Предусмотренный в схеме автоматизации инерционный магнитный выключатель предназначен для автоматического отключения двигателя станка-качалки при обрыве штанг и полированного штока, при поломках кривошипно-шатунного механизма и редуктора. Схема инерционного магнитного выключателя ИМВ-1М приведена на рис.
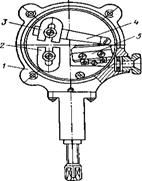
Устройство собрано в корпусе 1, закрытом крышкой б, и крепится к полке балансира станка-качалки скобой 7. Внутри корпуса расположены ударный рычаг 4 с контактным устройством 5 и два постоянных магнита, обращенных одноименными полюсами друг к другу. Магнит 2 закреплен на корпусе, а магнит 3 — на ударном рычаге. При указанных выше повреждениях глубиннонасосной установки возникают значительные ускорения балансира станка, в результате чего ударный рычаг выключателя резко смещается вниз и нажимает на микровыключатель контактного устройства. При этом электродвигатель станка отключается. При смещении ударного рычага магниты сближаются, в результате взаимодействия одноименных полюсов магнитов они отталкиваются, рычаг после удара по микровыключателю возвращается в исходное положение.
|
|
|
Блок управления скважиной БУС - предназначен для выполнения след. операций : ручное управление СКН по команде с групповой установки по гтдравлическому каналу связи, програмное управление, остановка СКМ при аварийном состоянии обор. и обрыве фаз, самозапуск СКН при кратковременных перерывах снабжении эл. Эн-гией, авар-я защита и сигнализация.
Основные функции систем телемеханики, их структура
В основе функционирования любой системы управления (технической , биологической или социальной) лежат информационные процессы, связанные со сбором, хранением, переработкой информации и исполнением команд управления. В простых локальных системах часто отсутствует четкое выделение информационных процессов между отдельными частями системы. С увеличением сложности системы и занимаемой ею территории функции, выполняемые отдельными частями системы, дифференцируются. Появляются специальные устройства сбора, хранения, передачи информации и исполнения команд управления. Комплекс таких устройств называется комплексом устройств телемеханики. Увеличение сложности и скорости функционирования технологического оборудования, возрастание потока информации, а также рассредоточение объектов контроля и управления на значительной площади привело к необходимости применения устройств телемеханики в нефтяной промышленности.
|
|
|
Структурная схема комплекса устройств телемеханики (рис)
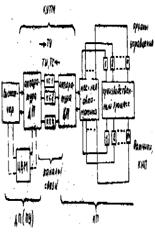
Структурная схема, комплекса устройств телемеханики (КУТМ) приведена на рис, Контролируемым пунктом (КП) в телемеханике называют место расположения объектов контроля и управления. Пункт управления (ПУ) или диспетчерский пункт ДП - это место размещения диспетчерского оборудования. Управление производственным процессом возлагается на диспетчера, который получает необходимые сведения о ходе производственного, процесса при помощи датчиков или контрольно-измерительных приборов (КИП). Эти данные передаются в виде сигналов телеизмерения (ТИ) и телесигнализации (ТС). На основании полученных данных диспетчер принимает решения, которые он передает в виде команд телеуправления (ТУ) на органы управления. Телеизмерение (ТИ) - получение с помощью комплекса устройств телемеханики измерительной информации о значении контролируемых параметров. Различают телеизмерение текущих значений параметров (в данный момент времени) и интегральных значений параметров (например, количество жидкости, прошедшей через расходомер за какой-либо период времени). Теле сигнализация (ТС) - получение информации о дискретном состоянии контролируемых объектов, например, агрегат работает или не работает. Телеуправление (ТУ) - воздействие на органы управления путем подачи дискретных команд. В ряде случаев применяются телемеханические устройства с какой-либо одной функцией, например, телеизмерительные устройства. При управлении сложным или быстродействующим процессом диспетчер может не успевать своевременно перерабатывать необходимый объем информации, тогда используют цифровую вычисли тельную машину (ЦВМ), работающую либо в режиме советчика диспетчера либо в режиме непосредственного управления производственным процессом. Такая совокупность комплекса устройств телемеханики и вычислительной машины в первом случае называется телеинформационной системой, а во втором – телеавтоматической. Обычно устройства телемеханики работают в комплексе с местной автоматикой, что дает существенную экономию в передаваемых сигналах (например при остановки рабочего насосного агрегата на КНС автоматически включается резервный без участия диспетчера) и дает возможность технологическому оборудованию некоторое время работать при, неисправности устройств телемеханики. Средства телемеханики решают две задачи: 1) передача технологической иэвестительной (ТИ, ТС) и командной (ТУ) информации, эта задача решается собсгвенно устройствами телемеханики, которые являются неотъемлемой частью автоматизированных систем управления технологическим процессом (АСУ,ТП); 2) передача производственностатистической информации для целей планирования и управления работой промышленных, научных, торговых предприятий. Эта задача решается специальной аппаратурой передачи данных, которая в настоящее время выделилась в специальную дисциплину.
|
|
|
|
|
|
Импульсные признаки сигналов
В телемеханике используются как дискретные сигналы, состоящие из некоторого числа посылок, которые обладают определенными качественными признаками, так и непрерывные сигналы. Различные импульсные признаки сигналов показаны на рис.

а - полярный ; б - амплитудный; в - длительность
посылок; г - фазовый; д - частотный
Полярные признаки сигналов (рис.а). В этом случае сигналы отличаются полярностью напряжения или направлением тока. Первый признак (качество) - положительная полярность, второй признак (качество) - отрицательная полярность. Характерной особенностью полярного признака сигналов является возможность использования только в проводных линиях связи, а также высокая помехоустойчивость, т.к. их качество не изменяется с изменением параметров линии связи. Амплитудные признаки сигналов (рис.б). В этом случае качественных признаков может быть много, но, т.к. их качество может изменяться, например с изменением параметров линий связи (низкая помехоустойчивость), их число ограничивают. Часто используется два качества: есть напряжение (ток), нет напряжения (тока). Большее количество качественных признаков применяется при использовании кабельных линии связи, параметры которых относительно стабильны. Амплитудные признаки могут быть у сигналов постоянного напряжения (тока) или у сигналов переменного напряжения (тока). Длительность посылок (pиc в) Импульсным признаком может быть не только длительность импульсов постоянного или переменного напряжения (тока), но и длительность пауз. Сигналы с этим признаком обладают низкой помехоустойчивостью, поэтому используют два-тpи качества. Фазовые признаки сигналов {рис г). Фаза посылки определяется по отношению к фазе опорного сигнала (на рис г показана пунктирной линией). Обычно используется два качества: синфазный сигнал и противофазный сигнал. Частотные признаки сигналов (рис д). Посылкой в этом случае является несколько импульсов постоянного напряжения (тока) или сигнал переменного напряжения (тока) длительностью в несколько периодов. Сигналы с частотным признаком могут быть использованы при любом канале связи и обладают высокой помехоустойчивостью, поэтому используется большое число качеств. Импульсы постоянного напряжения (тока) иногда называют видеоимпульсами в отличие от радиоимпульсов, или импульсов переменного напряжения (тока). Иногда используется комбинированный сигнал, состоящий из частотного и полярного сигналов.
Разделение сигналов
Для телемеханических устройств характерно уплотнение каналов связи (разделение сигналов). Это означает, что сигналы (ТИ, ТС, ТУ) в линии связи должны сохранять, свои индивидуальные свойства, не искажать друг друга и могут быть выделены независимо друг от друга. Существует различные способы разделения сигналов, но наибольшее распространение получили два: частотный и временной. Сущность частотного способа разделения сигналов (риc 1)

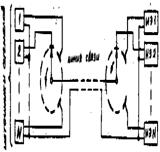
а - распределение частот сигналов; б - схема организации каналов связи
При частотном способе разделения сигналов полоса частот линии связи Fлc разделяется на N частей, чтобы разместить спектры частот Df n сигналов и между ними оставались защитные промежутки. Каждый сигнал поступает из источника сообщений последовательно или одновременно. На приемной стороне имеются полосовые фильтры, которые пропускают сигнал только одной частоты, поступающий на соответствующий исполнительный элемент ИЭ. Аналогичный способ разделения каналов связи используется также в радиосвязи. Передающие станции передают сообщения на различных несущих частотах, а приемником, настраиваясь на определенную несущую частоту, выделяют нужное сообщение. При передаче дискретных сигналов, например, двоичных кодов, фильтр и исполнительный элемент образуют частотный избиратель или частотное реле, которое формирует сигнал, если приходит частотная посылка определенной частоты. Схема поясняющая временной способ разделения, приведена на рис 2.
Источники сигналов и исполнительные элементы (приемники сигналов) через коммутаторы соединены с линией связи. В каждый интервал времени D t к-л источник сигналов соединен с соответствующим ему исполнительным элементом; за это время происходит передача сигнала. Затем происходит переключение коммутатора, и от следующего источника сигнал передается своему исполнительному элементу. После окончания цикла (одного оборота коммутатора) Т = SD t i начинается следующий цикл; таким образом, в течение цикла работы распределителя каждой паре - источнику и приемнику сигналов - выделяется временной канал связи. Для исключения сбоев работы коммутаторов она должна быть синхронизирована. Из-за низкого быстродействия и надежности электромеханических коммутаторов в настоящее время применяются в основном электронные. Иногда используют комбинированное разделение сигналов. Например, в выделенной полосе частот (частотное разделение) организуют временное разделение сигналов, или, во временных каналах организуют частотное разделение.
Избирание сигналов
Избирание сигналов - это выбор нужного сигнала из нескольких передаваемых по линии связи сигналов. В общем случае рассмотренные способы разделения сигналов обеспечивают и их избирание. Однако при телеуправлении избирание сигналов несколько отличается от разделения сигналов. Непосредственное избирание сигналов ТУ (рис 1) по существу не отличается от разделения сигналов. Одним из N ключей формируется сигнал, который через устройства разделения сигналов УРС передается на соответствующий исполнительный элемент ИЗ. Непосредственное избирание сигналов:
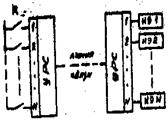
Рис.1
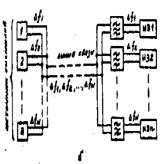
Групповое избирание сигналов ТУ (рис2) отличается тем, что избирание происходит в
неск. этапов.

Исполнительные эл-ты ИЭ объектов управления разбиваются на n групп, и к каждой группе относятся m исполнительных элементов. Первой командой производят выбор группы, а второй - исполнительного элемента. Групповое избирание дает существенное упрощение аппаратуры т.к. для управления N исполнительными элементами в первом случае требуется подать N команд, а во втором - m + n, причем N = n * m. Например, для управления 100 исполнительными элементами во втором случае может потребоваться всего 20 сигналов, если все исполнительные элементы разбить на 10 групп по 10 исполнительных элементов в каждой. В КУТМ ТМ-600М сначала подается частотный сигнал выбора КП, определенной групповой замерной установки, а затем сигнал постоянного тока определенной полярности для того, чтобы переключить скважины на замер, снять данные телеизмерения дебита и т.д. В ряде случаев целесообразно использовать не двухступенчатый выбор, а трехступенчатый или более сложный выбор. В настоящее время для телемеханизации нефтепромысловых объектов в основном применяются комплексы устройств телемеханики ТМ-600М и ТМ-620.
Дата добавления: 2018-05-12; просмотров: 1402; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!