Данные к построению механической характеристики рабочей машины относительно вала электродвигателя
НОВОСИБИРСКИЙ ГОСУДАРСТВЕННЫЙ АГРАРНЫЙ УНИВЕРСИТЕТ
Инженерный институт
А.Ю. Кузнецов, П.В. Зонов
ЭЛЕКТРОПРИВОД И
ЭЛЕКТРООБОРУДОВАНИЕ
Учебно-методическое пособие

Новосибирск 2015
УДК 631.3 – 83 + 621.3 (075)
ББК 40.76, Я 73
Э 453
Рецензент: канд. техн. наук, доц. В.Л. Основич
Кузнецов А.Ю.Электропривод и электрооборудование: учеб.-метод. пособие / А.Ю. Кузнецов, П.В. Зонов; Новосиб. гос. аграр. ун-т. Инженер. ин-т. – Новосибирск: Изд-во НГАУ, 2015. – 86 с.
Учебно-методическое пособие содержит теоретический материал, а также практические задания с примерами и рекомендациями по выполнению заданий контрольной работы по электроприводу и по электрооборудованию. Приведен порядок решения типовых задач.
Предназначено для студентов всех форм и направлений обучения.
Утверждено и рекомендовано к изданию методическим советом Инженерного института (протокол № 5 от 22 декабря 2015 г.).
Ó Новосибирский государственный аграрный университет, 2015
ВВЕДЕНИЕ
Учебно-методическое пособие предназначено для самостоятельной работы по дисциплине «Электропривод и электрооборудование» при выполнении контрольной работы. Оно знакомит студентов, в т.ч. заочной формы обучения, с основными теоретическими положениями по электрическому приводу переменного и постоянного тока и содержит задания с рекомендациями для их самостоятельного выполнения.
|
|
|
Учебно-методические указания, изложенные в пособии, разработаны с учетом требований ФГОС ВО с программой учебной дисциплины «Электропривод и электрооборудование».
1. ОБЩИЕ УКАЗАНИЯ
Для студентов всех форм обучения учебным планом по курсу «Электропривод и электрооборудование» предусмотрено выполнение контрольной работы.
Контрольная работа по курсу содержит три задания. Условие каждой задачи общее для всех студентов. Студент должен выполнить свой вариант контрольной работы в соответствии с шифром (последние две цифры зачетной книжки). Данные к заданию № 1 приведены в табл. 9 и 10, заданию № 2 – в табл. 2, заданию № 3 – в табл. 2.
Для выполнения контрольной работы студенту необходимо изучить соответствующую литературу, решить задачи и упражнения, приведенные в рекомендованной литературе, чтобы иметь полное представление по рассматриваемому вопросу. Задачи и примеры посвящены вопросам оценки и расчета механических и регулировочных характеристик электроприводов с двигателями постоянного и переменного тока, в том числе с релейным управлением посредством регулируемых сопротивлений в цепях электродвигателей.
В процессе выполнения контрольной работы студенты- заочники приобретают навыки управления координатами электропривода и их регулирования, умение исследовать и анализировать его характеристики.
|
|
|
При выполнении задания контрольной работы студенту необходимо соблюдать следующие правила.
В тексте контрольной работы должны быть приведены
условия задачи соответственно выполняемому варианту. Выполнение работы должно сопровождаться краткими объяснениями, подробными вычислениями и необходимыми обоснованиями. При вычислении каждой величины нужно указать, какая величина определяется. Решение задачи надо произвести сначала в общем виде (формулы в буквенных выражениях), и затем, после необходимых преобразований, вставлять соответствующие числовые значения. Необходимо указать размерность как всех заданных в условиях задачи
величин, так и полученных результатов. Расчеты можно производить с точностью до трех знаков после запятой.
Рекомендуется выполнять графическое и текстовое оформление с помощью ПК. Принципиальные схемы необходимо начертить в соответствии с ЕСКД (согласно действующим стандартам).
Графический материал желательно выполнять аккуратно на миллиметровой или чертежной бумаге с применением чертежных наборов или с помощью ПК.
|
|
|
В конце контрольной работы необходимо привести список использованной литературы, указать на титульном листе дату окончания работы и поставить свою подпись.
Не засчитываются небрежно оформленные, не- законченные, а также выполненные не по своему варианту контрольные работы.
На экзамене студенты сдают контрольные работы
преподавателю-экзаменатору (студенты без контрольных работ к экзамену не допускаются).
2. ЭЛЕКТРИЧ ЕСКИЕ ДВИГАТ ЕЛИ ПЕРЕМЕННОГО ТОКА
Асинхронным двигателем (АД) называется двигатель переменного тока, в котором угловая скорость ротора не равна угловой скорости вращения магнитного поля статора.
Асинхронный электропривод (АЭП) – это такой электропривод, в состав которого входит АД. Относится к числу наиболее простых, надежных и дешевых электроприводов. Поэтому, несмотря на то, что пусковые характеристики у АЭП являются нелинейными, а электромеханическая и механическая характеристики также нелинейные, этот электропривод находит широкое применение в устройствах, не требующих высокой точности.
В настоящее время принята следующая классификация АД:
1) по электропотреблению:
- однофазный;
- двухфазный;
|
|
|
- трехфазный;
2) по конструктивному исполнению:
- с фазным ротором;
- с короткозамкнутым ротором;
- с полым немагнитным ротором;
- с полым ферромагнитным ротором;
3) по характеру перемещения рабочего органа:
- с вращательным движением рабочего органа;
- с поступательным перемещением рабочего органа.
Схемы включения и конструктивная схема асинхронного двигателя общего назначения представлены на рис. 2.1-2.4.
На рис. 2.1 – 2.2 обозначено:
R1Д – дополнительные резисторы в обмотке статора;
R2Д – дополнительные резисторы в обмотке ротора (применяются в мощных установках для ограничения тока и регулирования характеристик);


| Рис. 2.2. Схема АД с Рис. 2.1. Схема АД с корот козамкнут ым ротором фазным ротором |
| Рис. 2.3. Конструкт ивная схема АД: |
1 – вал электродвигателя; 2 – пакет пластин ротора; 3 – обмотка ротора; 4 – пакет пластин статора; 5 – обмотка статора; 6 –
| 8 – |
| 9 – |
коллекторного токоподвода;
корпус статора;
анкерный
болт; 10 – шарикоподшипниковые опоры ротора

| Рис. 2.4. Обмот ка корот козамкнутого ротора типа «беличья клет ка»: |
1, 1’ – торцевые части; 2 – стержни; 3 – магнито-мягкое
железо ротора
Принцип действия АД
Для пояснения принципа действия АД на рис. 2.5, 2.6 приведены его электромагнитная и эквивалентная схемы.

Рис. 2.5. Электромагнит ная схема АД
Угловая скорость вращения магнитного поля статора определяется по формуле
w = 2 ×p× fC ,
(2.1)
0 p
где р –число пар полюсов статора; fC – частота питающего напряжения.

Рис. 2.6. Простейшая эквивалент ная схема АД
Угловая скорость вращения ротора ω определяется по формуле
w = w0 ×(1- s ),
где s – скольжение, равное
(2.2)
w
| w |
0
(2.3)
| F. |
| 1. Двигательный режим. |
Ротор вращается с угловой
скоростью ω, меньшей угловой скорости статора ω0.
По правилу левой руки определяется направление тока, наводимого в короткозамкнутой обмотке ротора под действием ЭДС индукции. Сила Ампера F увлекает

| ω0 |
| ω |
| ω<ω0 |
проводник в направлении движения электромагнитного поля и определяется по правилу левой руки (рис. 2.7).
Рис. 2.7. Векторная диаграмма сил в двигательном режиме
При этом скольжение определяется выражениями
w n
s = 1- = 1-
w n
;w ³ w0 Þ s Î éë1,0 ) ,wÎ [0 ,¥ ).
(2.4)
0 0
2. Генераторный режим.

| ω0 |
| ω |
| ω<ω0 |
Рис. 2.8. Векторная диаграмма сил в генераторном режиме
С помощью внешней силы будем двигать проводник (ротор) со скоростью ω. В этом случае ротор вращается быстрее, чем магнитное поле статора (ω < ω0), и в проводнике ротора наводится ЭДС индукции по закону Фарадея. Возникает сила F по закону Ампера, так что (рис. 2.8) имеем:
w
| w |
0
;w ³ w0 Þ wÎ [w0 ,¥ ); s Î (0,-¥ ).
(2.5)
3. Режим торможения противовключением. Под действием внешней силы FВH ротор вращается против вращения магнитного поля (рис. 2.9).
Угловая скорость |ω|<|ω0|.
Направление ЭДС индукции определяется по правилу правой руки, а направление движущей силы F – по правилу левой руки.
| w |
w -(-w)
| w w |
;-wÎ [0 ,-¥) ; s Î (1,+¥) .
(2.6)
0 0

| ω0 |
| ω>0; ω0<0 |
Рис. 2.9. Векторная диаграмма процессов торможения
Схемы замещения. Естественные характеристики АД
Схемы замещения АД справедливы для одной фазы (рис.
 2.10, 2.11).
2.10, 2.11).

| Рис. 2.10. П-образная схема замещения |
Рис. 2.11. Т-образная схема замещения
На рис. 2.10, 2.11 приняты следующие обозначения: UФ – фазовое напряжение; Xμ, Rμ – индуктивная и активная составляющие сопротивления воздушного зазора; Iμ – ток в
зазоре; I1 – ток в обмотке статора;
I '2
– приведенный ток во
вторичной обмотке; X1, R1 – индуктивная и активная составляющие сопротивления статора; X′2, R′2 – приведённые ко вторичной обмотке индуктивная и активная составляющие сопротивления ротора; E1, E′2 – ЭДС индукции первичной и вторичной обмоток; s – скольжение ротора.
В реальном случае ротор механически не связан со статором, а в схеме замещения они находятся в единой цепи, поскольку ток переменный и имеют место утечки через воздушный зазор.
Введем понятие коэффициента трансформации:
| E E |
2 2 k
(2.7)
где E1 и E2k – фазные ЭДС статора и ротора при
неподвижном роторе; напряжение сети.
UF .ном
– фазное номинальное
Тогда параметры ротора пересчитываются к параметрам
первичной обмотки (статора) по следующим формулам:
E'2 = E1 = k × E2 ;ü
ï
I '2
= I2 ; ï
| ý |
R'2 = R2
× k2 ; ï
(2.8)
X '2 = X 2
×k 2 ; ï
| ï |
= E'2 , ï
| ï |
Формулы (2.7) и (2.8) – это формулы приведения (штрих означает приведенный параметр). Реакция воздушного зазора отражена в виде включения в цепь сопротивлений Rμ и Xμ.
Влияние ротора проявляется соответственно через
индуктивное и переменное активное сопротивление
X '2 и
R'2 / s . Будем использовать для анализа П-образную схему замещения. Т-образную схему обычно не рассматривают, так
как выражение для
I '2 в ней гораздо сложнее; результаты же
получаются очень близкими для обеих схем.
Достоинством схемы, представленной на рис. 2.10, является то, что токи, протекающие через зазор, не
оказывают влияния на расчетный ток
I '2 . Это справедливо,
если пренебречь внутренним сопротивлением источника тока. При таком предположении для расчета остаются неизвестными только UФ и ток, протекающий через элементы внешнего контура электрической схемы.
По закону Ома находим уравнение электромеханической характеристики АД:
UF
| ( X + X ' ) +æ R |
| 1 2 |
| ç |
| è |
| 1 |
| + R'2 ö |
| s |
| ÷ |
| ø |
. (2.9)
Выведем уравнение механической характеристики АД. Для этого запишем формулу для мощности:
P0 = M ×w0 ,
где M – электромагнитный момент АД. Полезная мощность:
(2.10)
P = M × w.
Тогда потери мощности:
DP = P0 - P = M × (w0 - w) = M ×w0 × s.
(2.11)
(2.12)
Выразим ΔP через электрические параметры для трех фаз
АД:
DP = 3× (I ' )2 × R' .
(2.13)
2 2
Приравниваем (2.12) и (2.13):
M × w × s = 3×( I' )2 × R' ,
(2.14)
откуда
0 2 2
3×(I ' )2 × R '
M = 2 2 .
| 0 |
(2.15)
Подставляя в полученное выражение уравнение (2.9), получаем формулу для статической механической характеристики асинхронного двигателя:
3×(U )2 × R '
| é |
2
(2.16)
w × s × ( X + X ' )2 + æ R + R2 ' ö ù
0 ê 1 2 ç 1
s ÷ ú
ë è ø û
Выражения (2.9) и (2.16) – итоговые соотношения (т.е. не
содержащие дифференциальных элементов). В отдельных случаях выражение (2.16) разрешают относительно s.
Потери мощности (2.12) вызваны наличием момента сопротивления:
MД – MС = 0. (2.17)
В установившемся режиме:
MД = MС = M. (2.18)
На основании выражений (2.17), (2.18) получают зависимость момента двигателя от скольжения.
Анализ электромеханической характеристики АД
График электромеханической характеристики АД имеет вид, представленный на рис. 2.12.
На рис. 2.12 приняты следующие обозначения: Iкз – ток короткого замыкания (ротор неподвижен); ω – угловая
скорость; s – скольжение;
I '2
– действующее значение тока.
Точка a соответствует максимальному значению тока в роторе (в этой точке имеет место критическое скольжение sk). В точке s = 0 ток равен нулю. Пересечение кривой 2 и оси
абсцисс
I '2
соответствует значению тока на вторичной
обмотке при неподвижном роторе.
Из уравнения (2.9) для sk находим:
| 1 |
(2.19)
s
| R |
| k |
1
(2.20)

| s ω s=(–∞) ω=(+∞) |
| 3 |
| sk s=0 |
| ω0 |
| a |
| 2 |
| 0 |
| l0 |
| I′2max |
| 1 |
| I′2 |
| Iкз 1 |
| s=(+∞) ω=(–∞) |
Рис. 2.12. Электромеханическая характеристика
Если s→±∞, то:
UF
| ( X1 + X '2 ) + R1 |
(2.21)
Максимальное значение тока:
I '2max
= U F ; X
(2.22)
k
X k = X1 + X '2 .
(2.23)
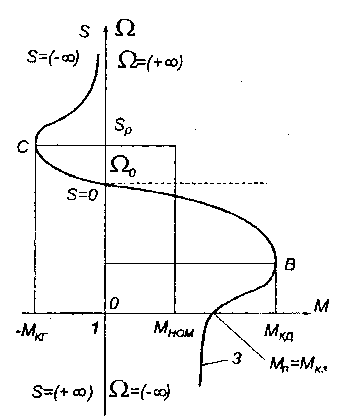
Анализ механической характеристики АД
График электромеханической характеристики АД имеет вид, представленный на рис. 2.13.
На графике (рис. 2.13) точка B соответствует двигательному режиму работы, точка C – генераторному режиму; Mном –номинальный момент, определяется при скольжении s = 3-5%; Mп = Mкз – пусковой момент.
Из выражения (2.16) определяем максимальное значение момента:
3×(U )2
M = F .
(2.24)
| R 2 |
| 2 |
| 1 |
| + X |
| k |
Критическое скольжение:
| k |
R' .
(2.25)
| 2 |
| s s =(–∞) |
| ω ω=(+∞) |
| C |
| sρ ω0 |
| s = 0 |
| В |
| 0 |
| M |
| -Mкг |
| 1 |
| Mном ω=(–∞) |
| Mкд 3 Mп = Mкз |
| s =(+∞) |
1 k
Рис. 2.13. Механическая характеристика
Задание № 1
Данные, используемые для расчета задания №1, приведены в табл. 9
Для системы трехфазный асинхронный электродвигатель
– рабочая машина (двигатель питается от электросети напряжением 380/220 В):
1. По данным нагрузочной диаграммы, используя метод
эквивалентных величин, определить необходимую мощность приводного электродвигателя по нагреву. Выбрать в качестве приводного электродвигателя по каталогу электродвигатель сельскохозяйственного назначения или четырехполюсный асинхронный двигатель общепромышленного назначения серии 4А.
2. Рассчитать и построить механическую характеристику электродвигателя ω = f1(MД), определить мощность, потребляемую из сети в номинальном режиме, номинальный и пусковой ток электродвигателя.
3. Рассчитать и построить на том же графике механическую характеристику рабочей машины ω = f2(МС), приведенную к угловой скорости вращения вала электродвигателя.
4. Определить графоаналитическим методом (методом
площадей) продолжительность пуска электродвигателя с нагрузкой при номинальном напряжении.
5. Оценить условия запуска электродвигателя с нагрузкой при снижении питающего напряжения на ΔU %.
6. Выбрать сечение токоведущих жил линии, питающей
АД от распределительного пункта (РП). Данные по линии приведены в табл. 10. Проверить, запустится ли АД при пуске вхолостую в условиях, когда напряжение на шинах РП равно номинальному. При проверке исходить из того, что пуск АД возможен, если напряжение на его зажимах UД ³ 0,8·UД.ном.
Рекомендации по выполнению задания №1
1.
| n åPi |
| 2 |
| ×ti |
| 1 n åti 1 |
PЭ =
, (1)
где Рi – мощность на валу электродвигателя в i-й период работы, кВт;
ti – продолжительность i-гo периода работы, мин;
n – количество периодов нагрузки.
Мощность электродвигателя при его полном охлаждении во время паузы в работе выбирают по каталогу исходя из условия:
PH ³
PЭ ,
pM
(2)
где РH – номинальная мощность электродвигателя, кВт;
рM – коэффициент механической перегрузки.
Коэффициент механической перегрузки рM определяется через коэффициент тепловой перегрузки двигателя рT:
| pT |
1
pT = 1- e -tP /TH , (4)
где tP – полная продолжительность работы двигателя с переменной нагрузкой, мин; ТH –постоянная времени нагрева электродвигателя, мин. Постоянную времени нагрева ТH принять для ориентировочного выбора мощности электродвигателя по (2), где ТH = 20 мин.
Анализируя выражения (3) и (4), можно установить, что при tP > 90 мин рT ≈ 1, а следовательно, и рM ≈ 1.
Каталожные параметры двигателя свести в таблицу по образцу табл. 1, используя данные табл. 5.
Таблица 1 Каталожные параметры электродвигателя
| Тип АД | Рн, кВт | Uн, В | М*м, Н·м | М*п, Н·м | М*к, Н·м | cos φ | η, % | Sн | I*п |
Примечание:
М*м – кратность минимального вращающего момента электродвигателя по отношению к номинальному моменту;
М*п – кратность пускового вращающего момента электродвигателя по отношению к номинальному моменту;
М*к – кратность максимального вращающего момента электродвигателя по отношению к номинальному моменту;
Sн = (n0 – nн) / n0 – номинальное скольжение АД, соответствующее номинальному вращающему моменту;
n0 = (60 × f) / p – синхронная частота вращения ЭД (магнитного поля статора), об/мин;
р = (60 × f) / nн – число пар полюсов электродвигателя (ближайшее меньшее целое число);
f = 50 Гц – частота тока в электрической сети;
I*п – кратность пускового тока.
Ток, потребляемый двигателем в номинальном режиме
работы, определяется по формуле
Iн =
| P |
3  ×Uн ×cos jн ×hн
×Uн ×cos jн ×hн
, (5)
где Uн – номинальное напряжение электродвигателя, В; cos φн – коэффициент мощности;
ηн – коэффициент полезного действия. Пусковой ток равен
Iп = kп · Iн , (6)
где kп = I*п –кратность пускового тока.
2. Механическую характеристику АД ω = f1(MД) строят на основании расчета его вращающих моментов для угловых скоростей, соответствующих скольжениям:
s = 0; s = sн; s = 0,1; s = sк; s = 0,4; s = sм = 0,8; s = 1.
Вращающий пусковой момент электродвигателя при s = 1 (ω = 0) следует определить, используя кратность пускового
момента М*п , а минимального при s = 0,8 – используя кратность минимального момента М*м по выражению:
Мп = Мн ∙ М*п ; Мм = Мн ∙ М*м, (7) где Мн = Рн / ωн – номинальный вращающий момент АД, Н·м; ωн = π·nн / 30 = 0,105× nн – номинальная угловая скорость АД, 1/с; nн – номинальная частота вращения, об/мин).
Остальные вращающие моменты электродвигателя для скольжений от 0 до 0,9 рассчитываются на основании упрощенной формулы Клосса (8):
M = 2× M к
s s , (8)
+ к
sк s
где Мк = М н ∙ М*к – максимальный вращающий момент АД, Н·м;
s = s
×æ M * +
ö – критическое скольжение двига-
| ( |
| M - 1 |
| * |
| к |
| ) |
| 2 |
è ø
теля, соответствующее максимальному вращающему моменту.
Данные расчета механической характеристики ω = f1(MД) свести в табл. 2. Переход от скольжения к угловой скорости произвести по формуле
ω = ω0 × (1 – s), (9)
где ω0 = 2∙π∙f / p – синхронная угловая скорость вращения вала АД, 1/с.
Таблица 2 Данные к построению механической характеристики
Асинхронного двигателя
| s | 0 | sн | 0,1 | sк | 0,3 | 0,4 | 0,5 | 0,6 | 0,7 | 0,8 | 0,9 | 1,0 |
| ω, 1/с | ω0 | ωн | ωк | ωм | 0 | |||||||
| М, Н·м | 0 | Мн | Мк | Мм | Мп |
При построении механических характеристик ω = f1(MД) значения ω располагают по оси ординат (функция), а значения М – по оси абсцисс (аргумент).
Интерполируя механическую характеристику двигателя в ее пусковой части, следует учесть, что при скольжении s >
sк формула Клосса занижает действительные вращающие моменты. В частности, для s = 0,4 вращающий момент, вычисленный по (8), будет несколько занижен.
3. Для приведения моментов вращения рабочей машины к валу электродвигателя, необходимо использовать следующее соотношение:
MC =
| M |
| i ×h |
пер
, (10)
где i = nн / nPM.ном – передаточное отношение передачи от электродвигателя к рабочей машине; МC – приведенный момент сопротивления, Н·м.
С учетом выражения (10) приведенный момент статического сопротивления на валу электродвигателя:
M = 1
é
× êM + M
æ
- M ×
w ö ù
| a |
(11)
C PM.0 ( P M.ном PM.0 ) ç ÷
i ×hпер êë
è wн ø úû
Давая ω значения от 0 до ω = ω0, рассчитывают зависимость ω = f2(MС). Принять МРМ.0 равным 0,2·МPM.ном, где MРМ.0 – момент сопротивления рабочей машины при угловой скорости, равной 0.
На основании этих расчетных данных строится кривая ω
= f2(MС) на том же графике, что и механическая характеристика электродвигателя ω = f1(МД). Данные расчета механической характеристики ω = f2(MС) свести в табл. 3.
Таблица 3
Данные к построению механической характеристики рабочей машины относительно вала электродвигателя
| ω, 1/с | ||||||||
| MС, Н·м |
4. Графоаналитический метод расчета времени пуска и торможения ЭП, получивший название метода площадей, подробно изложен в рекомендованной литературе [1-5].
Метод площадей, вкратце, заключается в следующем. При известном графике изменения момента двигателя и
статического момента рабочей машины в выражении MД – MС
| MД – MС |
времени Δt разность моментов остается величиной
постоянной, с учетом принятых допущений уравнение движения электропривода будет иметь вид:
(MД – MС )/ J = Δω/Δt. (12)
Приведенный момент инерции системы «АД – рабочая машина» относительно вала электродвигателя можно выразить в виде:
J = k × JД
+ JPM
i2
, (13)
где k – коэффициент, учитывающий момент инерции передачи от электродвигателя к рабочей машине. Принять k равным 1,2.
Используя построенные во втором квадранте (рис. 1) механические характеристики электродвигателя ω = f1(МД) и рабочей машины ω = f2(MС), графически находим их разность
– кривую динамического (избыточного) момента Мдин = f3(МД
–
| (МД |
– МС) = const и равен его средней величине Мдин.i.
| OB |
получаем отрезок ОВ, для второго –
1 и т.д. Отмеченные
| J. |
| ОС, |
| АВ, |
координат проводят прямую
параллельную
которая
характеризует искомую функцию для первого
| ω = f4(t) |
| АОВ |
| ODC. |
| ОВ/ОА= = CD/OD, |
| ОВ = МД |
и Действительно, но
| OD = Δt1. |
Проведя аналогичное построение для всех последующих участков, определяют ω = f4(t) и находят искомое время пуска привода: tп = J∙ωн / (MД – МС), где принимается MД =
=(Мп + Мк)/2. В процессе построения принимают за tп время, при котором ω = 0,95·ω0.
Продолжительность разгона электропривода на каждом
участке угловых скоростей рассчитывают по выражению
Dti
= J ×
Dwi
Mдин. i
, (14)
где ∆ωi = ωi – ωi–1 – интервал угловой скорости на i-м участке, 1/с; Мдин.i – средний избыточный момент на i-м участке, принимаемый постоянным, Н·м.
Полная продолжительность пуска равна сумме частичных продолжительностей:
m
tп = åDti , (15)
i =1
где m – количество ступеней, на которые разбивается кривая динамических (избыточных) моментов.
Результаты расчета свести в таблицу 4.
5. Вращающий момент асинхронного электродвигателя для любой фиксированной частоты вращения прямо пропорционален квадрату приложенного напряжения, поэтому для всех частот вращения справедливо соотношение:
| * 2 |
| н |
относительная величина напряжения, подведенного к электродвигателю, в долях от номинального.

Рис. 1. Построение зависимостей для определения времени пуска АД
Таблица 4 Данные расчета продолжительности пуска
Электропривода с нагрузкой
| Номер участка при разгоне | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
| ωнач, 1/с | 0 | |||||||
| ωкон, 1/с | ||||||||
| ∆ω i = ω i – ω i – 1, 1/с | ||||||||
| Мдин. i, Н·м | ||||||||
| Δti, с | ||||||||
| tп, с |
Для оценки возможности запуска электродвигателя при нагрузке в случае снижения напряжения на ∆U % необхо- димо пересчитать вращающие моменты ЭД прямо пропор- ционально квадрату напряжения U* = 1 – (ΔU% / 100) и пост- роить зависимость ω = f4[МД(U)], совместив ее с механической характеристикой рабочей машины, приведенной к валу электродвигателя. Это позволит сделать заключение: электродвигатель не запустится, запустится или «застрянет» и не разгонится до частоты вращения, соответствующей рабочей зоне его механической характеристики.
Если хотя бы на одном участке механических характеристик разгона электропривода Мдин(U) ≤ 0, то необходимо сделать заключение, что при пуске с нагрузкой и понижении питающего напряжения на ∆U % электропривод не запустится. Тогда ∆U % принять равным 20 %.
6. Согласно Правилам устройства электроустановок (ПУЭ) [6], сечение проводов и кабелей местных линий напряжением до 1000 В выбирается по условию
Iдоп ³ Iраб ,
где Iдоп – длительно допустимый ток для провода (кабеля) выбранного сечения, соответствующий условиям прокладки линии; Iраб – рабочий ток линии.
Поскольку в данном случае кабельная линия питает только один двигатель, ток в этой линии равен току, потребляемому двигателем из сети. Следовательно, Iраб =
I1ном. В соответствии с условием Iдоп ³ Iраб = I1ном по табл. 6 выбираем сечение кабеля S, мм2, для которого Iдоп подходит.
Выбранное сечение кабеля необходимо проверить по допустимой потере напряжения в нормальном режиме работы. Согласно нормам ПУЭ [6], относительное падение напряжения для силовых электроприемников в нормальном режиме равно DU % = 5 %.
Для трехфазной сети [7] с сосредоточенной нагрузкой, приложенной в конце линии, потеря напряжения равна:
DU =
1 ×( R ×cos j + X
× sin j )× P × l,
(17)
| U |
| н |
где DU – линейная потеря напряжения, В;
Uн – номинальное (междуфазное) напряжение, В;
l – длина линии, км;
R0, X0 – активное и реактивное сопротивления проводников на единицу длины линии, Ом / км;
Р – расчетная активная мощность в линии, кВт.
Для расчетов более удобно пользоваться относительной величиной потери напряжения:
DU% = e0% × I1H ×l ,
(18)
где DU % – линейная потеря напряжения в процентах, %;
e0 % – удельная потеря напряжения, % /(А×км);
I1ном – номинальный ток фазы статора.
Найдем предельно допустимую удельную потерю напряжения e0 % пред. :
e0 % пред. = DU % / I1ном l , % /А×км.
Очевидно, что для прокладки линии должен быть принят
кабель такого минимального сечения, для которого необходимо выполнение условия:
e0 % ≤ e0 % пред.
Из табл. 8 выбираем кабель с минимальным сечением (мм2), соответствующим условию выбранного двигателя (т.к.
для него e0 % уже определено). Таким образом, исходя из проверки по предельно допустимой потере напряжения, сечение кабеля может быть увеличено.
Проверим выполнение условий пуска без реостата:
e0 % пред. = DUп % / Iл.п l , %, где Iл.п = I1ном · I*п – линейный пусковой ток.
Тогда по табл. 8 по известному cos jп, находим, что условие пуска обеспечивается при кабеле, сечение фазы которого равно S, мм2.
Таблица 5 Технические данные АД серии 4А основного исполнения
| Тип | Рн, кВт | Iн, А | nн, об/мин | cos φн | ηн, % | I*п | М*п | М*к | М*м | JД, кг·м2 |
| 4А50А4УЗ | 0,06 | 0,31 | 1380 | 0,60 | 50 | 2,5 | 2,0 | 2,2 | 1,7 | 29·10-6 |
| 4А50А4УЗ | 0,09 | 0,42 | 1370 | 0,60 | 55 | 2,5 | 2,0 | 2,2 | 1,7 | 33·10-6 |
| 4А56А4УЗ | 0,12 | 0,44 | 1375 | 0,66 | 63 | 3,5 | 2,1 | 2,2 | 1,5 | 0,0007 |
| 4А56В4УЗ | 0,18 | 0,66 | 1365 | 0,64 | 64 | 3,5 | 2,1 | 2,2 | 1,5 | 0,0008 |
| 4А6ЭА4УЗ | 0,95 | 0,85 | 1380 | 0,66 | 68 | 4 | 2,0 | 2,2 | 1,5 | 0,0012 |
| 4А6ЭВ4УЗ | 0,37 | 1,2 | 1365 | 0,69 | 68 | 4 | 2,0 | 2,2 | 1,5 | 0,0014 |
| 4А71А4УЗ | 0,55 | 1,7 | 1390 | 0,70 | 70,5 | 4,5 | 2,0 | 2,2 | 1,8 | 0,0013 |
| 4А71В4УЗ | 0,75 | 2,17 | 1390 | 0,73 | 72 | 4,5 | 2,0 | 2,2 | 1,8 | 0,0014 |
| 4А80А4УЗ | 11 | 2,76 | 1420 | 0,81 | 75 | 5 | 2,0 | 2,2 | 1,6 | 0,0032 |
| 4А80В4УЗ | 1,5 | 3,57 | 1415 | 0,83 | 77 | 5 | 2,0 | 2,2 | 1,6 | 0,0033 |
| 4А904УЗ | 2,2 | 5,02 | 1425 | 0,83 | 80 | 6 | 2,1 | 2,4 | 1,6 | 0,0056 |
| 4А1004УЗ | 3,0 | 6,7 | 1435 | 0,83 | 82 | 6 | 2,0 | 2,4 | 1,6 | 0,0087 |
| 4А1104УЗ | 4,0 | 8,6 | 1430 | 0,84 | 84 | 6 | 2,0 | 2,4 | 1,6 | 0,011 |
| 4А112М 4УЗ | 5,5 | 11,5 | 1445 | 0,85 | 84,5 | 7 | 2,0 | 2,2 | 1,6 | 0,017 |
| 4А1324УЗ | 7,5 | 15,1 | 1455 | 0,86 | 87,5 | 7,5 | 2,2 | 3,0 | 1,7 | 0,028 |
| 4А132М 4УЗ | 11 | 22 | 1460 | 0,87 | 87,5 | 7,5 | 2,3 | 3,0 | 1,7 | 0,04 |
| 4А1.604УЗ | 15 | 29,3 | 1465 | 0,88 | 89 | 7 | 1,4 | 2,3 | 1,0 | 0,10 |
| 4А160М 4УЗ | 18,5 | 35,7 | 1465 | 0,88 | 90 | 7 | 1,4 | 2,3 | 1,0 | 0,13 |
| 4А1804УЗ | 22 | 41,3 | 1470 | 0,90 | 90 | 6,5 | 1,4 | 2,3 | 1,0 | 0,18 |
| 4А180М 4УЗ | 30 | 56 | 1470 | 0,89 | 91 | 6,5 | 1,4 | 2,3 | 1,0 | 0,23 |
| 4А200М 4УЗ | 37 | 68,8 | 1475 | 0,90 | 91 | 7 | 1,4 | 2,5 | 1,0 | 0,37 |
| 4А2004УЗ | 45 | 82,6 | 1475 | 0,90 | 92 | 7 | 1,4 | 2,5 | 1,0 | 0,45 |
| 4А225М 4УЗ | 55 | 100 | 1480 | 0,90 | 92,5 | 7 | 1,3 | 2,5 | 1,0 | 0,64 |
| 4А2504УЗ | 75 | 136 | 1480 | 0,80 | 93 | 7 | 1,2 | 2,3 | 1,0 | 1,0 |
| 4А250М 4УЗ | 90 | 162 | 1480 | 0,91 | 93 | 7 | 1,2 | 2,3 | 1,0 | 1,2 |
| 4А2804УЗ | 110 | 201 | 1470 | 0,90 | 82,5 | 5,5 | 1,2 | 2,0 | 1,0 | 2,3 |
| 4А280М 4УЗ | 132 | 240 | 1480 | 0.90 | 93 | 5,5 | 1,3 | 2,0 | 1,0 | 2,5 |
| 4А3154УЗ | 160 | 285 | 1480 | 0,91 | 93,5 | 6 | 1,3 | 2,2 | 1,9 | 3,1 |
| 4А315М 4УЗ | 200 | 351 | 1480 | 0,92 | 94 | 6 | 1,3 | 2,2 | 0,9 | 3,6 |
| 4А3554УЗ | 250 | 438 | 1485 | 0,92 | 94,5 | 7 | 1,2 | 2,0 | 0,9 | 6,0 |
| 4А355М 4УЗ | 315 | 549 | 1485 | 0,92 | 94,5 | 7 | 1,2 | 2,0 | 0,9 | 7,0 |
Таблица 6 Токовые нагрузки четырехжильных кабелей с
Дата добавления: 2018-05-12; просмотров: 715; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!