СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ И РЕГУЛИРОВАНИЯ ИХ РОЛЬ И МЕСТО В НАШЕЙ ЖИЗНИ.
Практически ни одна техническая система – от железной дороги до ядерного реактора – не работает без той или иной формы управления. Физический процесс – это последовательная смена состояний объектов физического мира ("комбинации связанных событий в системе, в результате которых изменяются, перемещаются или запасаются материя, энергия и информация"). Технический процесс определен как "процесс, физические переменные которого можно измерить и изменить техническими средствами". Итак, физический процесс не обязательно должен управляться извне, а технический процесс включает обработку информации для достижения заданной целевой функции.
Под системой будем понимать любой объект, который рассматривается, с одной стороны, как единое целое, а с другой – как совокупность связанных между собой определенным образом составляющих.
Цель системы – получить результат, качественно или количественно превосходящий механическую (простую) сумму результатов работы отдельных ее компонентов. Это "нечто большее" определяется не наличием тех или иных компонентов системы, а скорее есть результат их взаимодействия.
В технике под системой понимают совокупность машин и устройств, выполняющих какой-либо технологический процесс и взаимосвязанных между собой потоками энергии, вещества и информации.
ДС – это любая система, свойства и поведение которой существенно зависят от времени. В математических моделях ДС время является независимым аргументом.
|
|
|
В теории автоматического регулирования и управления динамическая система – это совокупность объекта управления и управляющего устройства.
К динамическим системам, в частности, относятся так называемые системы автоматического управления (САУ). Поясним суть изображённой на рисунке схемы: На вход САУ подаётся некое задающее воздействие X(t), определяющее, требуемое значение регулируемого параметра. Как правило, оно подаётся на один из входов элемента сравнения. Элемент сравнения, сравнивает сигнал X(t) с сигналом L(t), поступающим с датчика обратной связи и формирует на выходе сигнал ошибки e(t). Датчик обратной связи служит для преобразования величины регулируемого параметра Y(t) в сигнал такой же природы и размерности, как и у сигнала X(t). Кроме того, он может показывать значение сигнала Y(t) в форме удобной для наблюдения человеком. Управляющее устройство, в зависимости от величины и знака сигнала e(t), формирует управляющее воздействие U(t) подаёт его на вход О.У. Значение Y(t) с выхода О.У. поступает на датчик обратной связи. Помимо сигнала U(t), на О.У. воздействуют также внешние случайные факторы – возмущающие воздействия F(t), как правило, мешающие работе устройства в заданном режиме. Сигнал U(t) меняется так, чтобы сигнал L(t), а следовательно и сигнал Y(t), стал равным сигналу X(t).
|
|
|
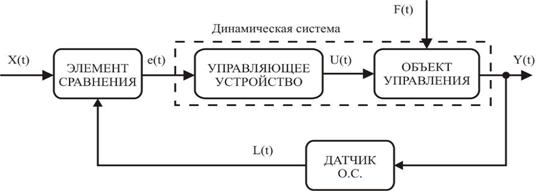 где: X(t) – задающее воздействие; e(t) – сигнал ошибки рассогласования; U(t) – управляющее воздействие; F(t) –возмущающее воздействие; Y(t) – регулируемый параметр (координата); L(t) – сигнал обратной связи; О.С. – обратная связь.
где: X(t) – задающее воздействие; e(t) – сигнал ошибки рассогласования; U(t) – управляющее воздействие; F(t) –возмущающее воздействие; Y(t) – регулируемый параметр (координата); L(t) – сигнал обратной связи; О.С. – обратная связь.
ПРИНЦИП РАБОТЫ СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОЛЕТОМ САМОЛЕТА (СИСТЕМА САМОЛЕТ – АВТОПИЛОТ).
Сочувствую тому, кому попался этот билет L
Автопилоты.Современные автопилоты (АП) представляют собой комплекс совместно работающих устройств, обеспечивающих стабилизацию ЛА на траектории, стабилизацию высоты полета, управление маневрами ЛА и приведение его в горизонтальный полет.
В основу схемы автопилотов при работе в режиме стабилизации положен принцип регулирования по углу, угловой скорости (автопилоты типа АП-6Е, АП-28, АП-31, АП-40 и др.), а у некоторых автопилотов и по угловому ускорению (автопилоты типа АП-15). Система представляет единую замкнутую систему автоматического регулирования и управления. Автопилот состоит обычно из трех автоматических систем регулирования с внутренними перекрестными связями. Все три системы обычно выполняются по одинаковым схемам.
|
|
|
В состав каждого канала входят измерительные устройства ИУ, суммирующие устройства СУ, усилительные (У) и исполнительные устройства (РМ). Измерительные устройства ИУ автопилотов типа АП (например, датчики углов крена, тангажа, курса, высоты и т. п.) измеряют значения отклонений угла и угловой скорости (например, угла тангажа n, угловой скорости тангажа vn) и преобразуют эти отклонения в величины напряжений Un и Uv. После алгебраического суммирования в суммирующем устройстве СУ сумма напряжений US усиливается усилителем У и подается на рулевую машину РМ автопилота. Последняя отклоняет руль высоты, в результате чего появившееся отклонение угла тангажа ликвидируется.
На суммирующее устройство с выхода рулевой машины подается сигнал Uос обратной связи. Отрицательная обратная связь обеспечивает устойчивость и быстрое затухание колебаний системы. Для задания определенного значения угла тангажа nз в схеме автопилота предусматривается специальный задатчик этой величины. Аналогичные функциональные схемы имеют каналы управления креном и курсом самолета. Для устранения автоколебаний в системе в автопилотах применяется жесткая обратная связь. Жесткая обратная связь применяется для получения в установившемся состоянии пропорциональности между отклонением руля и отклонением ЛА.
|
|
|
В качестве чувствительных элементов, реагирующих на угловые отклонения ЛА относительно центра тяжести, применяются:
· по курсу ≈ гирополукомпасы, дистанционные магнитные компас,ы, курсовые системы;
· по крену и тангажу ≈ центральные гировертикали, гиродатчики дистанционных авиагоризонтов;
· по курсу, крену и тангажу ≈ курсовертикали;
· по угловой скорости ≈ демпфирующие гироскопы;
· по угловому ускорению ≈ специальные устройства, вырабатывающие сигналы, пропорциональные угловому ускорению ЛА, путем дифференцирования сигналов датчиков угловой скорости.
Электрические сигналы отклонений ЛА по углу, угловой скорости и угловому ускорению, полученные с датчиков, усиливаются электронными или электромашинными усилителями, подаются на рулевые машины, которые перемещают соответствующие рули самолета или изменяют режимы работы (тягу) авиадвигателей. Автопилоты имеют электрические связи с курсовыми системами, централями скорости и высоты, демпферами колебаний, автоматами дополнительных усилий, навигационными вычислительными устройствами.
Дата добавления: 2018-05-12; просмотров: 472; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!