Анализ неизменяемой части системы
Федеральное агентство по образованию Российской Федерации
Государственное образовательное учреждение высшего профессионального образования
«Южно-Уральский государственный университет»
Факультет «Приборостроительный»
Кафедра «Системы управления»
Динамический синтез системы управления
ПОЯСНИТЕЛЬНАЯ ЗАПИСКА
к курсовой работе
по дисциплине «Теория автоматического управления»
ЮУрГУ–22040062.2014.326.ПЗ КР
Нормоконтролер Руководитель работы
________________ Г.В. Зырянов ________________ Г.В. Зырянов
«____»________________2015 г. «____»________________2015 г.
Автор работы
студент группы ЗИЭФ–326
_____________А.М. Муратгалин
«____»________________2015 г.
Работа защищена
с оценкой
___________________________
«____»________________2015г.
Челябинск 2015
АННОТАЦИЯ
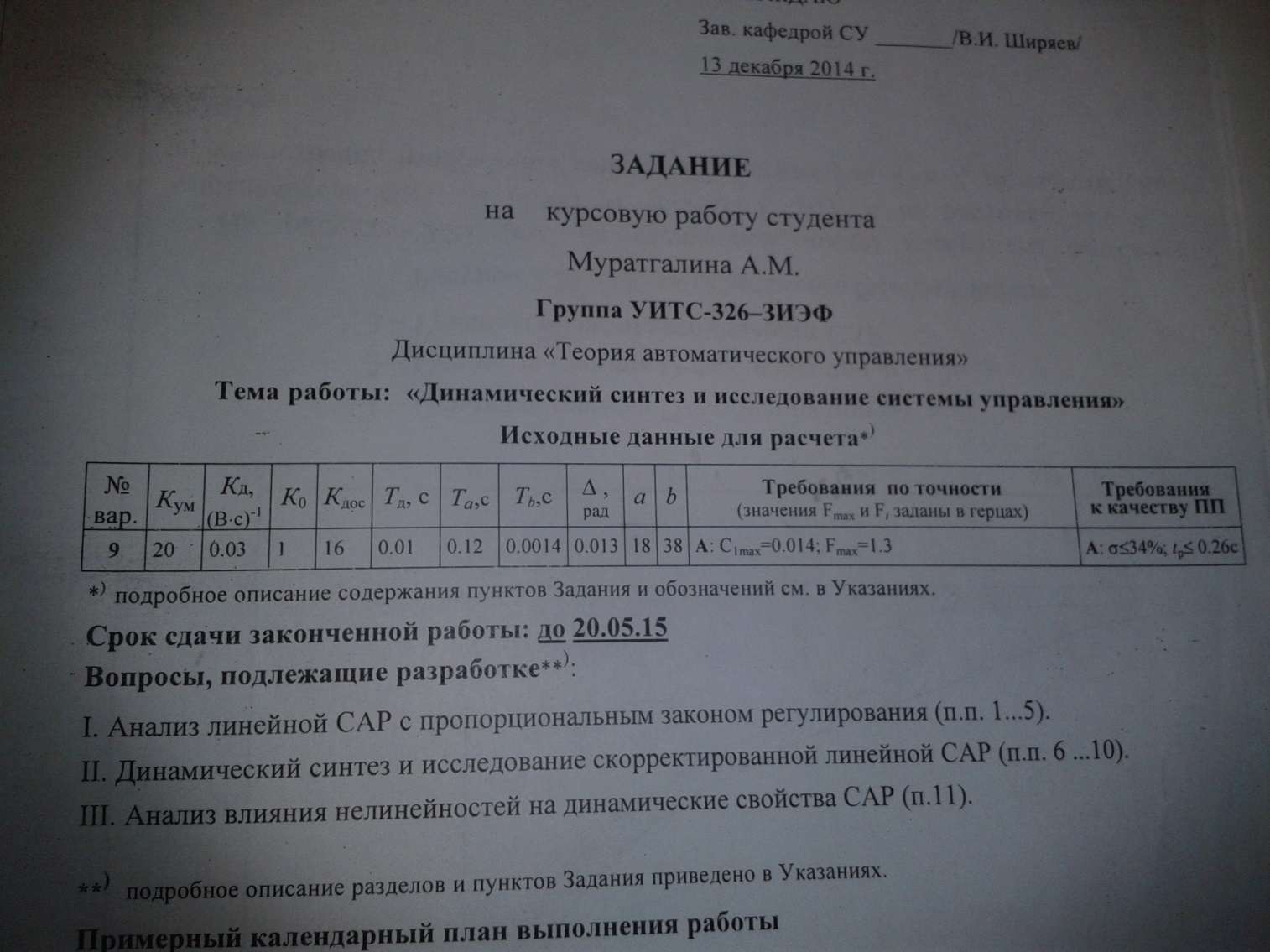
Рассматривается типовая задача динамического синтеза одноконтурной следящей системы автоматического управления исполнительного привода, преобразующего электрический сигнал с выхода усилителя мощности в угловое перемещении нагрузки. Для решения поставленной задачи используется графоаналитический (частотный) метод, предложенный В.А. Бесекерским.
Подробно описана методика синтеза регулятора, проведен анализ скорректированной линейной системы, рассмотрено поведение системы при отработке типовых входных (тестовых) сигналов, построены области заданного качества системы, проведен анализ системы с учетом нелинейностей. Рассмотрена возможность цифровой реализации корректирующего устройства, предложен способ технической реализации управляющего вычислительного устройства с помощью современных микропроцессорных и микроэлектронных средств. Результаты цифрового моделирования подтверждают соответствие полученной системы заданным показателям качества.
СОДЕРЖАНИЕ
Введение. 4
1. Синтез линейной системы.. 6
1.1 Анализ неизменяемой части системы.. 6
1.2 Синтез регулятора. 11
1.3 Анализ скорректированной системы в частотной области. Ошибка! Закладка не определена.
1.4 Оценки прямых показателей качества. Ошибка! Закладка не определена.
2. Отработка типовых входных сигналов. Ошибка! Закладка не определена.
2.1 Единичная ступенчатая функция. Ошибка! Закладка не определена.
СПИСОК ЛИТЕРАТУРЫ.. 13
Введение
В данной курсовой работе рассматривается следящая система управления, предназначенная для воспроизведения входного сигнала. В следящей системе выходная величина воспроизводит изменение входной величины, причем автоматическое устройство реагирует на рассогласование междувходной и выходной величинами. Следящая система имеет обратную связь выхода с входом, которая, по сути дела, служит для измерения результата действия системы.
Следящие системы применяются, в основном, для дистанционного управления самыми разнообразными объектами, а также для телеуправления /1, стр.12/.
Согласно техническому заданию, необходимо рассчитать автоматическое управляющее устройство (регулятор) системы, при введении которого система будет удовлетворять предъявленным к ней в техническом задании требованиям. Необходимо синтезировать корректирующее устройство, провести анализ полученной системы, а также рассмотреть способы реализации синтезированного регулятора.
При выполнении расчетов и моделирования будем использовать ППП MATLAB 2010 и VisSim7.0. При работе с линейной системой будем использовать только ППП MATLAB 2010, при дальнейших исследованиях — оба ППП. При этом каждому разделу основной части пояснительной записки соответствует свое приложение с соответствующим порядковым номером, поэтому в тексте пояснительной записки нет необходимости ссылаться на приложения.
В приложении приведены исходные тексты файлов-сценариев MATLAB и/или структурные схемы VisSim, а также результаты расчетов и моделирования, причем каждый следующий сценарий использует данные предыдущего сценария, находящиеся в оперативной памяти (в рабочем пространстве MATLAB). Структурные схемы состоят из составных блоков, содержимое которых раскрывается при первом их использовании; при следующем использовании их содержимое уже не раскрывается, если оно остается при этом неизменным.
Синтез линейной системы
Анализ неизменяемой части системы
Система содержит последовательно включенные усилитель мощности УМ, объект управления ОУ и датчик обратной связи ДОС, связанный с ОУ при помощи кинематической связи КС /4, стр.7/.
Функциональная схема замкнутой системы с пропорциональным регулятором Р приведена на рисунке 1.1.

Рисунок 1.1 – Функциональная схема замкнутой системы
Усилитель мощности предполагается безынерционным, но с ограниченной зоной линейности  при . В кинематической связи между ОУ и ДОС присутствует люфт (зазор) величиной
при . В кинематической связи между ОУ и ДОС присутствует люфт (зазор) величиной  /4, стр.8/.
/4, стр.8/.
Передаточные функции ОУ и ДОС имеют следующий вид:
 ;
;
 ;
;
Передаточная функция пропорционального регулятора:
 ;
;
Для получения линейной модели системы пренебрегаем наличием нелинейных эффектов, то есть, полагаем: усилитель мощности имеет неограниченную зону нелинейности; люфт в кинематической связи «выход системы – датчик обратной связи» отсутствует, а коэффициент передачи равен единице /4, стр.8/.
Таким образом, передаточные функции УМ и КС имеют следующий вид:
 ;
;  ;
;
Структурная схема линеаризованной системы приведена на рисунке 1.2.

Рисунок 1.2 – Структурная схема линеаризованной системы
Определим минимальный коэффициент усиления разомкнутой системы («вход - выход ДОС»)  , обеспечивающий заданную точность в вынужденном (установившемся режиме) и соответствующий ему коэффициент усиления регулятора.
, обеспечивающий заданную точность в вынужденном (установившемся режиме) и соответствующий ему коэффициент усиления регулятора.
Передаточная функция разомкнутой системы имеет следующий вид:

или
 (1.1)
(1.1)
где  — коэффициент усиления разомкнутой (нескорректированной) системы,
— коэффициент усиления разомкнутой (нескорректированной) системы,
 (1.2)
(1.2)
В техническом задании требования к точности системы указаны в виде максимального значения коэффициента ошибки  , соответствующего скорости изменения входного сигнала.
, соответствующего скорости изменения входного сигнала.
Коэффициентами ошибок называются коэффициенты разложения передаточной функции системы по ошибке в ряд по степеням s.
 (1.3)
(1.3)
где  – коэффициенты ошибок. (1.4)
– коэффициенты ошибок. (1.4)
Найдем коэффициент C1 исследуемой САР. Взяв первую производную передаточной функции замкнутой системы по ошибке в точке s = 0, согласно формуле (1.4) получим:
 (1.5)
(1.5)
Т.е. данный коэффициент ошибки зависит только от коэффициента усиления разомкнутой системы. В техническом задании присутствует следующее ограничение по точности:
 , где
, где  . (1.6)
. (1.6)
Следовательно, минимальное значение коэффициента усиления разомкнутой системы, обеспечивающее заданную точность, составляет
 . (1.7)
. (1.7)
Из соотношения (1.2) выразим и определим значение  , соответствующее минимальному значению
, соответствующее минимальному значению  :
:
 ; (1.8)
; (1.8)
Проверим устойчивость замкнутой системы по алгебраическому критерию Гурвица. Передаточная функция замкнутой системы  определяется согласно формуле:
определяется согласно формуле:
 ;
;
Подставляя в последнее соотношение выражение (1.1) для  (где ), получим:
(где ), получим:
 ;
;
Характеристическое уравнение разомкнутой системы примет вид:

где
 ,
,
 ,
,

 ;
;
 ;
;
 ,
,
 .
.
Все коэффициенты положительны, необходимое условие устойчивости выполняется. Найдем главные миноры матрицы Гурвица:
 ;
;
 ;
;
 ;
;
 ;
;
Все главные миноры матрицы Гурвица положительны, следовательно, рассматриваемая система является устойчивой по критерию Гурвица.
Так же при положительных коэффициентах полинома  четвёртого порядка для устойчивости САР необходимо и достаточно выполнение следующего неравенства:
четвёртого порядка для устойчивости САР необходимо и достаточно выполнение следующего неравенства:


Условие неравенства выполняется, следовательно,данная замкнутая САР по критерию Гурвица устойчива.
Дата добавления: 2018-04-15; просмотров: 273; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!