Охарактеризуйте OPC-технология разработки программного обеспечения, использование в системах клиент-сервер.
OPC (OLE for Process Control) — технология связывания и внедрения объектов для систем промышленной автоматизации.
Технология OPC определяет 2 класса программ:
1.ОРС-сервер, непосредственно взаимодействующий с аппаратурой (напримерPLC);
2.ОРС-клиент, получающий данные от ОРС-сервера для дальнейшей обработки и передающий в ОРС-сервер команды управления, предназначенные аппаратуре.
Технология OPC разработана международной организацией OPC Foundation как промышленный стандарт для взаимодействия программ, обслуживающих комплексы телемеханики разных производителей. Основная цель стандарта OPC заключается в создании универсального механизма доступа к любому аппаратному устройству из прикладной программы. OPC позволяет производителям оборудования поставлять программные компоненты, которые стандартным способом обеспечивают связь ПО верхнего уровня АСУ ТП с технологическим контроллером.Структурная схема взаимодействия между аппаратурой, серверными и клиентскими программами:
 Как видно из схемы, программа ОРС-сервер выполняет непосредственное взаимодействие с аппаратурой (контролерами), обеспечивая сбор данных, передачу команд управления, диагностику каналов связи и т.д. OPC-сервер создает программные интерфейсы, обеспечивающие ОРС-клиентам доступ к данным, собираемым с аппаратуры. Программа OPC-клиент получает данные через интерфейс ОРС-сервера и выполняет их комплексную обработку — использует для визуализации, строит графики, выводит на печать, сохраняет на диске и т.д.
Как видно из схемы, программа ОРС-сервер выполняет непосредственное взаимодействие с аппаратурой (контролерами), обеспечивая сбор данных, передачу команд управления, диагностику каналов связи и т.д. OPC-сервер создает программные интерфейсы, обеспечивающие ОРС-клиентам доступ к данным, собираемым с аппаратуры. Программа OPC-клиент получает данные через интерфейс ОРС-сервера и выполняет их комплексную обработку — использует для визуализации, строит графики, выводит на печать, сохраняет на диске и т.д.
В рамках стандарта OPC все элементы данных объединяются в группы. Каждый элемент данных и группа имеют свое уникальное имя. Элементы данных и группы могут быть организованы в иерархическую структуру. Все элементы в каждой группе обновляются периодически, через равные промежутки времени, причем обновление элементов происходит синхронно.
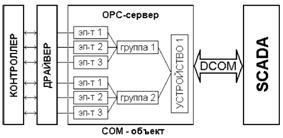
Рис. Схема OPC-взаимодействия. Элементы данных часто называют тегами (TAG). Именно эти тэги и являются технологическими переменными в SCADA-системе. Не следует думать, что любое устройство можно просто так «через OPC» подключить к любой SCADA-системе - для этого надо иметь OPC-сервер для данного устройства. Сервер можно получить либо вместе с устройством, либо купить, либо написать самостоятельно. Для написания OPC-серверов в составе некоторых SCADA поставляется специальное ПО.
Вывести аналитическое выражение для коэффициента нелинейности ГЛИН с ПОС.
Физически нелинейность выходного напряжения вызывается непостоянством зарядного тока емкости С1, в процессе формирования прямого хода. Анализ принципиальной схемы ГЛИН показывает, что на создание зарядного тока оказывают влияние три компоненты, непостоянство или несовпадение которых во времени и вызывает нелинейность выходного напряжения:
1.Наличие входного тока эмиттерного повторителя на VT2 обусловленного конечной величиной входного сопротивления:
2.Наличие тока разряда конденсатора С0, который во время прямого хода является источником энергии для заряжающегося конденсатора C1. Обычно этот ток характеризуется величиной напряжения, на которую уменьшается напряжение на накопительной емкости С0: ΔUС0
З.Наличие в цепи заряда управляемого источника напряжения E(t), величина которого пропорциональна величине изменяющегося напряжения на емкости С1 и обусловлена отличием от единицы коэффициента передачи К эмиттерного повторителя на VT2: Е(t) = Ек+ КUС1(t), К ≠ 1
Учет этих составлявших приводит к образованию следующая схемы заряда С1 (рис.11).
Для определения коэффициента нелинейности γ воспользуемся его определением (1.2), а с учетом общего соотношения (1.4) получим:
γ = 1 – ic1(tп.х) / ic1(0) (2.11,1)
- зарядный ток емкости С1 на момент действия соответственно переднего и заднего фронтов коммутирующего импульса. Поскольку при t = 0, UC1(0) = 0, ΔUС0(0) = 0, Uвых(0) = 0, Iвх.э.п.(0) = 0 (т.к. VT2- заперт), то из рис.7 видно:
iС1(0) = Ек / R (2.12)
При t = tп.х = Ткомм, по I закону Кирхгофа из рис.11 следует
iС1(t) = iR(t) - Iвх.э.п. (2.13)
На этапе формирования прямого хода, входной ток VT2 уже зависит от UC1(t):
Iвх.э.п. = UC1(t) / Rвх.э.п. = UС1(t) / βVT2Rэ (2.14)
βVT2 - статический коэффициент передачи тока VT2. Ток через резистор iR(t)
определяется разностью потенциалов на его концах:iR(t) = (Ек - ΔUС0 +KUC1(t) – UC1(t)) / R (2.15)
Величину ΔUС0 найдем из закона сохранения заряда, с учетом того что после запирания диода VD1 происходит перераспределение напряжение между емкостями С0 и С1. При этом в начале прямого хода емкость С0, заряженная до напряжения Ек, имеет заряд: q1 = C0Ек. По окончании прямого хода конденсатор С1 заряжается до напряжения UM, а С разряжается до напряжения Ux. Суммарный заряд системы стал:q2 = UMC1 + UxC0, q1 ≡ q2, а ΔUС0 = Ек – Ux, то ΔUС0 = UMC1/C0 (2.I6)
Подставляя (2.16) в (2.15) и далее (2.14) в (2.13, 2.12, 2.11,1), а также учитывая, что UС1(tп.х) = UM получим окончательно:

Физически нелинейность выходного напряжения вызывается непостоянством зарядного тока емкости С1, в процессе формирования прямого хода
Билет 13
Дата добавления: 2018-04-15; просмотров: 263; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!