Динамическое Генераторное Противовключение
Материалы для подготовки учащихся к итоговой аттестации по дисциплине «Основы электропривода» МИНИСТЕРСТВО ОБРАЗОВАНИЯ РЕСПУБЛИКИ БЕЛАРУСЬ УЧРЕЖДЕНИЕ ОБРАЗОВАНИЯ «МОГИЛЕВСКИЙ ГОСУДАРСТВЕННЫЙ ПОЛИТЕХНИЧЕСКИЙ КОЛЛЕДЖ» Специальность 2-53 01 05 Дисциплина «Основы электропривода»
МАТЕРИАЛЫ ДЛЯ ПОДГОТОВКИ УЧАЩИХСЯ К ИТОГОВОЙ АТТЕСТАЦИИ
ПО ДИСЦИПЛИНЕ
ОСНОВЫ ЭЛЕКТРОПРИВОДА»
Разработала преподаватель
Михальцова Е. Л.
2011
Обсуждено и одобрено
на заседании цикловой комиссии
электротехнических дисциплин
Протокол № ___ от __________________
Перечень вопросов к итоговой аттестации
По дисциплине «Основы электрического привода»
По специальности 2-53 01 05 «Автоматизированные электроприводы»
1 Дайте определение понятию «электропривод». Изобразите структурную схему электропривода. Опишите состав структурной схемы электропривода. Объясните принцип работы электропривода по его структурной схеме.
|
|
|
2 Перечислите типы электродвигателей, использующихся в электроприводах. Приведите классификацию электроприводов. Опишите отличия электроприводов по количеству используемых электродвигателей. Охарактеризуйте групповые, индивидуальные и взаимосвязанные электроприводы.
3 Дайте определение понятию «статический момент сопротивления». Укажите на какие виды подразделяются статические моменты. Объясните основные отличительные характеристики активных и реактивных статических моментов. Изобразите механические характеристики рабочих механизмов.
4 Дайте определение понятию «электропривод». Изобразите структурную схему электропривода. Объясните состав структурной схемы электропривода. Охарактеризуйте разновидности электроприводов по виду силового преобразователя.
5 Дайте определение понятию «электропривод». Приведите примеры реализации составляющих его элементов. Охарактеризуйте классификацию электроприводов. Объясните, чем характеризуется развитие современного электропривода.
6 Укажите, какой режим работы электропривода считается установившимся. Объясните изменения, происходящие в электроприводе, при нарушении установившегося режима. Запишите основное уравнение электропривода. Охарактеризуйте соотношения моментов в уравнении электропривода.
|
|
|
7 Дайте определение понятию «статический момент сопротивления». Укажите отличия между реактивным и активным статическими моментами. Запишите уравнение движения электропривода. Объясните его физический смысл.
8 Дайте определение понятию «механическая характеристика». Изобразите примеры механических характеристик различных электродвигателей. Укажите на графиках основные величины, характеризующие механические характеристики. Объясните основные показатели механических характеристик.
9 Дайте определения понятиям: «механическая» и «электромеханическая» характеристика. Объясните, какими показателями оцениваются механические характеристики. Изобразите примеры механических характеристик. Охарактеризуйте, как влияет жесткость характеристик на работу электродвигателя.
10 Запишите уравнение электромеханической характеристики двигателя постоянного тока независимого возбуждения. Объясните составляющие этого уравнения. Укажите, чем определяется скорость идеального холостого хода двигателя постоянного тока независимого возбуждения. Объясните какие составляющие уравнения влияют на жесткость механической характеристики.
|
|
|
11 Изобразите основную схему включения двигателя постоянного тока независимого возбуждения и обозначьте параметры цепи обмотки якоря и обмотки возбуждения. Приведите основные уравнения для напряжения, электродвижущей силы и электромагнитного момента двигателя постоянного тока. Объясните порядок вывода уравнения электромеханической характеристики двигателя постоянного тока. Постройте график механической характеристики двигателя постоянного тока независимого возбуждения и объясните его вид.
12 Дайте определение понятиям: «естественная» и «искусственная» механическая характеристика. Запишите уравнение механической и электромеханической характеристики двигателя постоянного тока. Объясните, изменением каких параметров регулируется скорость электродвигателя постоянного тока. Изобразите естественную механическую характеристику двигателя постоянного тока.
13 Запишите уравнение электромеханической характеристики двигателя постоянного тока независимого возбуждения. Дайте определение понятию «реостатное регулирование скорости» двигателя постоянного тока независимого возбуждения. Объясните, почему при увеличении сопротивления реостатов уменьшается жесткость механической характеристики. Изобразите семейство реостатных характеристик.
|
|
|
14 Дайте определение понятию «реостатное регулирование скорости» двигателя постоянного тока независимого возбуждения. Постройте реостатные характеристики двигателя постоянного тока независимого возбуждения. Объясните внешний вид реостатных характеристик двигателя постоянного тока независимого возбуждения. Оцените реостатное регулирование скорости двигателя постоянного тока независимого возбуждения основными показателями.
15 Запишите уравнение электромеханической характеристики двигателя постоянного тока независимого возбуждения. Изобразите механические характеристики при регулировании напряжения питания якоря. Поясните, почему при этом способе регулирования жесткость характеристик не меняется. Охарактеризуйте область применения такого способа регулирования скорости.
16 Укажите, какими способами можно изменять магнитный поток обмотки возбуждения двигателя постоянного тока независимого возбуждения. Опишите, как регулируется скорость двигателя постоянного тока независимого возбуждения при изменении магнитного потока обмотки возбуждения. Изобразите механические характеристики при регулировании скорости двигателя постоянного тока магнитным потоком обмотки возбуждения. Оцените регулирование скорости магнитным потоком обмотки возбуждения основными показателями.
17 Запишите уравнение электромеханической характеристики двигателя постоянного тока независимого возбуждения. Изобразите механические характеристики при регулировании скорости двигателя постоянного тока магнитным потоком обмотки возбуждения. Поясните изменение жесткости механических характеристик, при регулировании магнитного потока. Охарактеризуйте область применения такого способа регулирования скорости.
18 Укажите, какими способами изменяют напряжение питания двигателя постоянного тока независимого возбуждения для регулирования его скорости. Изобразите семейство механических характеристик электродвигателя при регулировании напряжения питания якоря. Объясните внешний вид механических характеристик при регулировании напряжения якоря. Охарактеризуйте регулирование скорости двигателя постоянного тока независимого возбуждения с помощью напряжения питания якоря основными показателями.
19 Назовите основные способы импульсного регулирования скорости двигателя постоянного тока независимого возбуждения. Запишите формулу для определения скважности работы ключа. Изобразите упрощенную схему импульсного регулирования сопротивления в цепи якоря. Объясните принцип ее работы.
20 Перечислите способы импульсного регулирования скорости двигателя постоянного тока независимого возбуждения. Укажите, что является основным показателем работы «ключа» при импульсном регулировании скорости. Изобразите упрощенную схему импульсного регулирования скорости двигателя постоянного тока и диаграммы изменения напряжения и тока. Объясните основные отличия широтно-импульсного способа регулирования скорости от частотно-импульсного.
21 Перечислите виды торможения двигателя постоянного тока независимого возбуждения. Изобразите упрощенные схемы тормозных режимов двигателей постоянного тока независимого возбуждения. Опишите условия возникновения различных режимов торможения. Поясните, какой из режимов торможения способствует энергосбережению.
22 Изобразите упрощенную схему реализации динамического торможения двигателя постоянного тока независимого возбуждения. Опишите условия реализации динамического торможения двигателя постоянного тока независимого возбуждения. Запишите формулу для определения тока якоря в режиме динамического торможения. Объясните, чем определяется наклон механических характеристик в режиме динамического торможения.
23 Назовите условия для возникновения генераторного режима в двигателе постоянного тока независимого возбуждения. Запишите и объясните выражения для тока якоря в режиме генераторного торможения. Изобразите механические характеристики двигателя постоянного тока независимого возбуждения в режиме генераторного торможения. Объясните область применения генераторного торможения двигателя постоянного тока независимого возбуждения.
24 Назовите условия возникновения динамического торможения двигателя постоянного тока независимого возбуждения. Запишите выражение для тока якоря в режиме динамического торможения, объясните. Изобразите механические характеристики двигателя постоянного тока независимого возбуждения в режиме динамического торможения. Объясните, как влияет величина добавочного сопротивления на процесс динамического торможения двигателя постоянного тока независимого возбуждения.
25 Назовите условия возникновения торможения противовключением двигателя постоянного тока независимого возбуждения. Запишите и объясните выражение для тока якоря в режиме торможения противовключением. Изобразите механические характеристики двигателя постоянного тока независимого возбуждения в режиме торможения противовключением. Объясните область применения торможения противовключением двигателя постоянного тока независимого возбуждения.
26 Изобразите основную схему включения двигателя постоянного тока последовательного возбуждения. Запишите уравнение механической и электромеханической характеристики двигателя постоянного тока последовательного возбуждения. Объясните вид механических характеристик двигателя постоянного тока последовательного возбуждения. Охарактеризуйте область применения двигателя постоянного тока последовательного возбуждения.
27 Укажите основной отличительный признак двигателя постоянного тока последовательного возбуждения. Объясните уравнение электромеханической характеристики. Изобразите основную схему включения двигателя постоянного тока последовательного возбуждения. Объясните, почему для двигателя постоянного тока последовательного возбуждения опасен режим холостого хода.
28 Перечислите способы регулирования скорости двигателя постоянного тока последовательного возбуждения. Запишите уравнение электромеханической характеристики двигателя постоянного тока последовательного возбуждения. Объясните сущность регулирования скорости двигателя постоянного тока последовательного возбуждения изменением напряжения питания. Изобразите семейство механических характеристик изменением напряжения питания.
29 Перечислите способы торможения двигателя постоянного тока последовательного возбуждения. Изобразите схемы реализации тормозных режимов. Объясните особенности динамического торможения двигателя постоянного тока последовательного возбуждения. Изобразите характеристики динамического торможения с независимым возбуждением двигателя постоянного тока последовательного возбуждения.
30 Укажите, как осуществляется реостатное регулирование скорости асинхронного двигателя с фазным ротором. Изобразите схему включения реостатов и механические характеристики при реостатном регулировании. Охарактеризуйте реостатное регулирование скорости асинхронного двигателя основными показателями. Объясните достоинство и недостатки реостатного регулирования скорости асинхронного двигателя.
31 Перечислите способы изменения напряжения питания асинхронного двигателя для регулирования его скорости. Изобразите механические характеристики асинхронного двигателя при регулировании напряжения питания. Объясните вид механических характеристик асинхронного двигателя при регулировании напряжения питания. Охарактеризуйте регулирование скорости асинхронного двигателя с помощью напряжения питания основными показателями и укажите достоинства и недостатки.
32 Запишите основной закон частотного регулирования скорости асинхронного двигателя. Изобразите механические характеристики асинхронного двигателя при частотном регулировании скорости. Объясните характер изменения момента асинхронного двигателя при регулировании скорости вверх и вниз от номинальной частотным способом. Дайте краткий сравнительный анализ устройств для частотного регулирования скорости асинхронного двигателя.
33 Укажите условия применения торможения противовключением асинхронного двигателя. Изобразите схему и механические характеристики асинхронного двигателя в режиме торможения противовключением. Объясните способы перевода асинхронного двигателя в режим торможения противовключением. Охарактеризуйте влияние добавочных сопротивлений на процесс торможения противовключением асинхронного двигателя и покажите на характеристиках.
34 Перечислите разновидности динамического торможения асинхронного двигателя. Укажите отличия динамического торможения асинхронного двигателя с фазным ротором и асинхронного двигателя с короткозамкнутым ротором. Опишите особенности динамического торможения с самовозбуждением асинхронного двигателя с короткозамкнутым ротором. Изобразите механические характеристики асинхронного двигателя в режиме динамического торможения и объясните влияние конденсаторов на работу асинхронного двигателя в двигательном режиме.
35 Дайте определение понятию «режим работы электропривода». Перечислите основные режимы работы электропривода (S1,S2,S3). Поясните особенности режимов работы электропривода. Изобразите нагрузочные диаграммы режимов работы.
36 Перечислите, в каких режимах электропривода возможно снижение потерь электроэнергии. Укажите, за счет чего снижаются потери энергии в переходных процессах. Объясните, как достигается энергосберегающий эффект при торможении. Обоснуйте, как предусматривается энергосберегающий эффект электропривода на стадии проектирования.
1 Дайте определение понятию «электропривод». Изобразите структурную схему электропривода. Опишите состав структурной схемы электропривода. Объясните принцип работы электропривода по его структурной схеме.
Электропривод— это электромеханическая система, осуществляющая преобразование электрической энергии в механическую энергию вращательного или поступательного движения и состоящаяиз взаимодействующих электромеханического преобразователя энергий(ЭД), механического передаточного устройства и устройств управления.
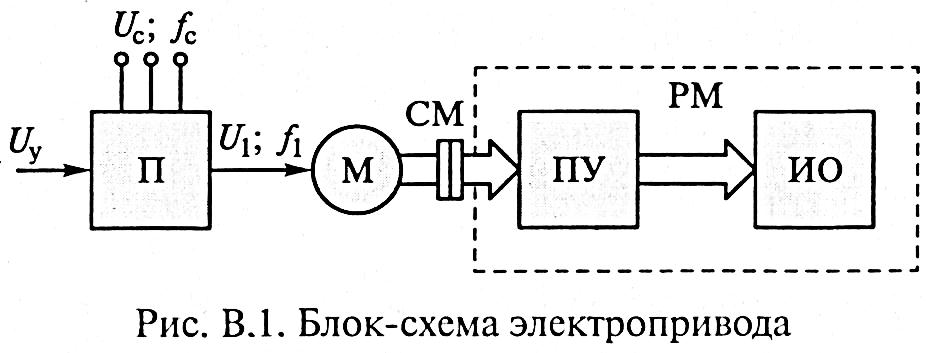 Блок-схема состоит:
Блок-схема состоит:
ПреобразователяП
Электродвигателя М
Механической муфты СМ
передаточного устройстваПУ
Исполнительного органа ИО
Для пояснения принципа работы ЭП обратимся к его блок-схеме (рис. В.1). Управляющий электрический сигналUyподается на преобразователь П, который в соответствии с сигналом Uу осуществляет преобразование и передачу электроэнергии из питающей сети с напряжениемUcи частотойfс на вход электродвигателя М с требуемыми значениями напряжения U1 и частотыf1.Электроэнергия, поступившая в двигатель М, преобразуется в механическую энергию вращения. Посредством соединительной механической муфты СМ вращательное движение вала двигателя передается рабочей машине РМ, где оно сначала проходит через механическое передаточное устройство ПУ для получения требуемых вращающего момента и частоты вращения или преобразования вращательного движения в поступательное, затем механическая энергия подается на исполнительный орган ИО рабочей машины.
В качестве механического передаточного устройства ПУ обычно применяют механические передачи, позволяющие изменять частоту вращения ременная, зубчатая цилиндрическая, зубчатая коническая, червячная.
Управление электроприводами осуществляется посредством устройств, составляющихаппаратуру управления: коммутирующих, преобразовательных, измерительных и др. Эта аппаратура обеспечивает ручное или автоматизированное управление.
2 Перечислите типы электродвигателей, использующихся в электроприводах. Приведите классификацию электроприводов. Опишите отличия электроприводов по количеству используемых электродвигателей. Охарактеризуйте групповые, индивидуальные и взаимосвязанные электроприводы. М8-9
В ЭП используются электродвигатели вращательного и поступательного движения постоянного и переменного тока непрерывного и дискретного перемещений.
ЭП классифицируются по характеру движения, виду и способам реализации силового преобразователя, числу используемых электродвигателей, виду источников электроэнергии, способу управления, наличию или отсутствию механической передачи и т.д.
По характеру движения различают ЭП вращательного и поступательного движения, при этом их скорость может быть регулируемой или нерегулируемой, а само движение - непрерывным или дискретным, однонаправленным, двунаправленным (реверсивным) или вибрационным (возвратно-поступательным).
По числу используемых двигателейразличают групповые, индивидуальные и взаимосвязанные ЭП.
Групповой ЭП характеризуется тем, что один его двигатель приводит в движение несколько исполнительных органов одной машины или один исполнительный орган нескольких рабочих машин. Индивидуальный ЭП обеспечивает движение одного исполнительного органа рабочей машины. Взаимосвязанный ЭП представляет собой два или несколько электрически или механически связанных между собой индивидуальных ЭП, работающих совместно на один или несколько исполнительных органов. При этом если двигатели связаны между собой механически и работают на общий вал, ЭП называется многодвигательным, а если двигатели связаны электрическими цепями, ЭП называется электрическим валом.
3 Дайте определение понятию «статический момент сопротивления». Укажите на какие виды подразделяются статические моменты. Объясните основные отличительные характеристики активных и реактивных статических моментов. Изобразите механические характеристики рабочих механизмов.
Статическим моментом сопротивления Мс. называется противодействие, которое двигатель испытывает со стороны механизма При передаче вращательного движения рабочему механизму.Статические моменты сопротивления разделяются на активные и реактивные.
Активныйстатический момент:
-действует в одном направлении независимо от направления движения механизма.
-сохраняет свое направление и величину даже в неподвижном механизме,
- создается силами притяжения Земли (постоянно действующими внешними силами, независящими от этого механизма).
-при подъеме груза активный статический момент направленпротивмомента двигателя, вращающего барабан, - при опускании груза —согласно с этим моментом.
Пример: статический момент сопротивления подъемной лебедки , создаваемый грузомG,подвешенным на тросе. Постоянно действующая на грузGгравитационная сила земного притяжения создает статический момент сопротивления независимо от от того, поднимается этот груз или опускается, или неподвижен.
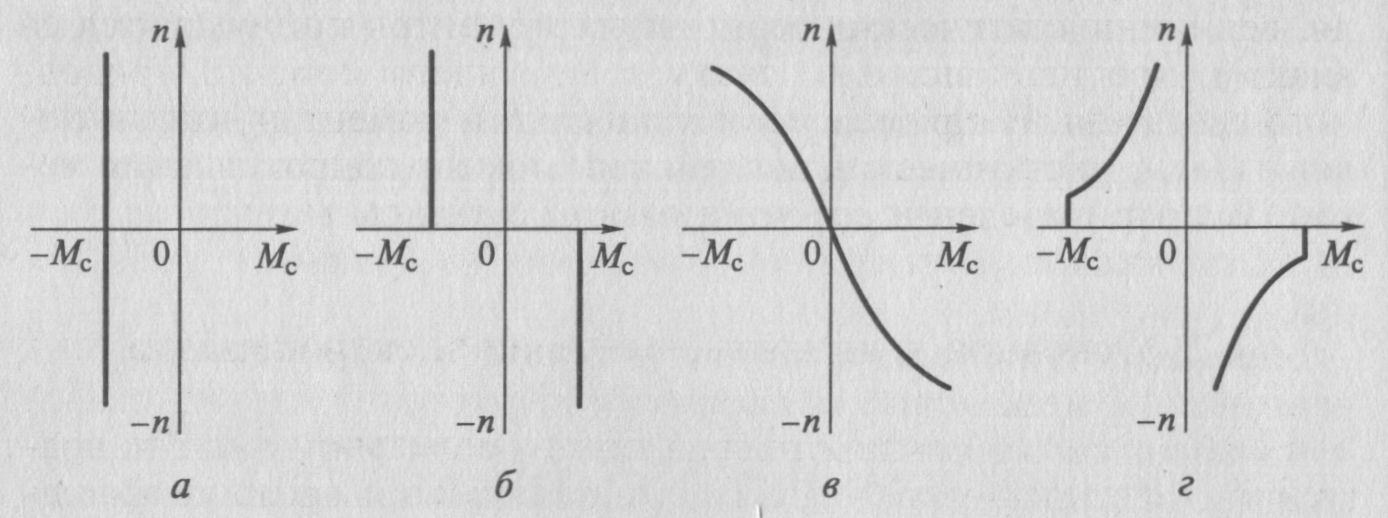
Механическая характеристика активного статического момента п = f(Mc)имеет вид прямой вертикальной линии (рис. 1.2,а),
Рис. 1.2. Механические характеристики рабочих механизмов:
а — подъемный механизм (лебедка); б — силы трения, резания, пластической деформации любого механизма; в— центробежный вентилятор, дымосос, центробежный насос; г— станок металлообрабатывающий
Реактивные статические моменты :создаются силами трения, действуют только в движущихся механизмах, при этом они направлены всегда противоположно этому движению,при изменении направления движения, изменитсянаправление реактивногоМс.
Mеханическая характеристика реактивного статического момента, вызванного силами трения и резания имеет вид прямых вертикальных линий, (рис. 1.2, б).Реактивные статические моменты производственных механизмов зависят не только от направления, но и от скорости движения. Например, у центробежных вентиляторов, центробежных насосов статический момент сопротивления пропорционален квадрату частоты вращения (М~ n2), поэтому механическая характеристика имеет вид параболы (рис. 1.2,в).Металлорежущие станки при постоянной мощностиимеют механическую характеристику, при которой с ростом реактивного момента Мс частота вращения п уменьшается (рис. 1.2,г).
4 Дайте определение понятию «электропривод». Изобразите структурную схему электропривода. Объясните состав структурной схемы электропривода. Охарактеризуйте разновидности электроприводов по виду силового преобразователя.
Электропривод— это электромеханическая система, осуществляющая преобразование электрической энергии в механическую энергию вращательного или поступательного движения и состоящаяиз взаимодействующих электромеханического преобразователя энергий(ЭД), механического передаточного устройства и устройств управления.
Блок-схема состоит:
ПреобразователяП
Электродвигателя М
Механической муфты СМ
передаточного устройстваПУ
Исполнительного органа ИО
Для пояснения принципа работы ЭП обратимся к блок-схеме (рис. В.1). Управляющий электрический сигналUyподается на преобразователь П, который в соответствии с сигналом Uу осуществляет преобразование и передачу электроэнергии из питающей сети с напряжениемUcи частотой fс на вход электродвигателя М с требуемыми значениями напряжения U1 и частоты f1.Электроэнергия, поступившая в двигатель М, преобразуется в механическую энергию вращения. Посредством соединительной механической муфты СМ вращательное движение вала двигателя передается рабочей машине РМ, где оно сначала проходит через механическое передаточное устройство ПУ для получения требуемых вращающего момента и частоты вращения или преобразования вращательного движения в поступательное, затем механическая энергия подается на исполнительный орган ИО рабочей машины.
По виду электрического силового преобразователя различают: управляемые и неуправляемые выпрямители, которые преобразуют напряжение переменного тока в напряжение постоянного (выпрямленного) тока; инверторы, выполняющие обратное преобразование; преобразователи частоты и напряжения переменного тока, изменяющие параметры напряжения переменного тока; импульсные преобразователи напряжения постоянного тока с различным видом модуляции выходногонапряжения постоянного тока.
Все эти силовые преобразователи могут быть выполнены на различной элементной базе, а именно с использованием электрических машин, магнитных усилителей, ионных и полупроводниковых элементов. Современные силовые преобразователи являются, как правило, полупроводниковыми, и в них используются главным образом силовые транзисторы, диоды, тиристоры и их разновидности.
5 Дайте определение понятию «электропривод». Приведите примеры реализации составляющих его элементов. Охарактеризуйте классификацию электроприводов. Объясните, чем характеризуется развитие современного электропривода. М 11
Электропривод— это электромеханическая система, осуществляющая преобразование электрической энергии в механическую энергию вращательного или поступательного движения и состоящаяиз взаимодействующих электромеханического преобразователя энергий(ЭД), механического передаточного устройства и устройств управления.
Блок-схема состоит:
ПреобразователяП
Электродвигателя М
Механической муфты СМ
передаточного устройстваПУ
Исполнительного органа ИО
Механические ПУ-в виде цилиндрических, червячных и планетарных редукторов, передач винт - гайка, цепных и ременных передач, гидравл. и электромагнитных муфт;
Электрические силовые преобразователи П:управляемые выпрямители, инверторы тока и напряжения, регуляторы частоты и напряжения, импульсные регуляторы напряжения; Устройства_управления:командоаппараты, блоки логических элементов, регуляторы, усилители, микропроцессоры и управляющие электронные машины. Как видно, реализация ЭП может быть весьма разнообразной, что находит свое отражение в их классификации.
ЭП классифицируются по характеру движения, виду и способам реализации силового преобразователя, числу используемых электродвигателей, виду источников электроэнергии, способу управления, наличию или отсутствию механической передачи и т.д.
По характеру движенияразличают ЭП вращательного и поступательного движения, при этом их скорость может быть регулируемой или нерегулируемой, а само движение - непрерывным или дискретным, однонаправленным, двунаправленным (реверсивным) или вибрационным (возвратно-поступательным).
По числу используемых двигателейразличают групповые, индивидуальные и взаимосвязанные ЭП.
К основным направлениям развития современного ЭП относятся:
-разработка и выпуск комплектных регулируемых ЭП с использованием современных преобразователей и микропроцессорного управления;
-повышение эксплуатационной надежности, унификации и улучшение энергетических показателей ЭП;
-расширение области применения регулируемого асинхронного ЭП и использование ЭП с новыми типами двигателей, а именно линейными, шаговыми, вентильными, вибрационными, повышенного быстродействия, магнитогидродинамическими и др.;
-развитие научно-исследовательских работ по созданию математических моделей и алгоритмов технологических процессов, а также машинных средств проектирования ЭП; .
-подготовка инженерно-технических и научных кадров, способных проектировать, создавать и эксплуатировать современный автоматизированный электропривод.
Решение этих и ряда других проблем позволит существенно улучшить технико-экономические характеристики ЭП и создать тем самым базу для дальнейшего технического прогресса во всех отраслях промышленного производства, транспорта, сельского хозяйства и в быту.
6 Укажите, какой режим работы электропривода считается установившимся. Объясните изменения, происходящие в электроприводе, при нарушении установившегося режима. Запишите основное уравнение электропривода. Охарактеризуйте соотношения моментов в уравнении электропривода.
Установившимся режимом наз. Режим работы ЭП при равномерной частоте вращения.В этом режиме вращающий момент двигателя уравновешивается реактивным статическим моментом сопротивления рабочего механизма Мс, а их сумма равна нулю:

Если же под действием каких-либо причин установившийся режим будет нарушен и изменится угловая скорость, то наступит переходный режим и на вал ЭД начнет действовать момент, обусловленный силами инерции вращающихся масс двигателя и механизма. Этот момент называется динамическим моментом, Н м:
гдеJ —момент инерции вращающихся элементов кг-м2;ω— угловая скорость вращения, рад/с.
. При установившемся режиме, ω= const, угловое ускорение dw/dt = 0, а поэтому динамический моментMj = 0.
 При переходном режиме на вал двигателя действуют три момента:М— вращающий момент двигателя,Мс— статический момент сопротивления и Mj — динамический момент. Эти моменты связаны уравнением:
При переходном режиме на вал двигателя действуют три момента:М— вращающий момент двигателя,Мс— статический момент сопротивления и Mj — динамический момент. Эти моменты связаны уравнением:
называемымосновным уравнением движения электропривода.
М›Мст: :нарастание угловой скорости т.е. при возникновенииускорения,динамический момент Mjпрепятствует этому нарастанию [знак плюс в уравнении] и он, суммируясь со статическим моментом сопротивления Мс, направлен против вращающего момента двигателя М.
М‹Мст: убывание угловой скорости вращения, т.е. призамедлениидинамический момент препятствует этому убыванию скорости [знак минус в уравнении] и, вычитаясь из статического момента, он уменьшает противодействие вращающему моменту М.
7 Дайте определение понятию «статический момент сопротивления». Укажите отличия между реактивным и активным статическими моментами. Запишите уравнение движения электропривода. Объясните его физический смысл. К8-13
Противодействие, которое испытывает двигатель при передаче вращательного движения рабочему механизму, наз. статическим моментом сопротивления Мс. Статические моменты сопротивления разделяются наактивные и реактивные.
Активный статический момент действует в одном направлении независимо от направления движения механизмаи сохраняет свое направление и величину даже в неподвижном механизме, так как создается постоянно действующими внешними силами, независящими от этого механизма. Примером является статический момент сопротивления подъемного механизма — лебедки, создаваемый грузом , подвешенным на тросе. Постоянно действующая на груз гравитационная сила земного притяжения создает статический момент сопротивления независимо от направления вращения барабана лебедки, т.е. поднимается этот Груз ,опускается, или неподвижен.
Реактивные статические моменты сопротивления действуют только в движущихся механизмах, при этом они направлены всегда противоположно этому движению. Если же направление движения изменится, то также изменится направление реактивного статического момента. При неподвижном состоянии механизма статический реактивный момент сопротивления равен нулю (Мс= 0).
В связи с тем, что реактивные статические моменты направлены противоположно вращающему моменту двигателя, их величины принимаются со знаком, противоположным знаку вращающего момента приводного двигателя. Например, если вращающий момент двигателя положителен, то статический реактивный момент сопротивления механизма отрицателен иего принимают со знаком минус.
Режим работы электропривода при равномерной частоте вращения называется установившимся режимом. В этом режиме вращающий момент двигателя М уравновешивается реактивным статическим моментом сопротивления рабочего механизма Мс, а их сумма равна нулю:
М+(-Мс) = 0.
Если же под действием каких-либо причин установившийся режим будет нарушен и изменится угловая скорость вращения, то наступит переходный режим работы электропривода и на вал двигателя начнет действовать еще один момент, обусловленный силами инерции вращающихся масс двигателя и механизма. Этот момент называется динамическим моментом, Н-м:
МJ= ±J(dɷ/dt),
где МJ — момент инерции вращающихся элементов электропривода и рабочего механизма относительно оси вращения, кг-м2; ɷ — угловая скорость вращения, рад/с.
При переходном режиме на вал двигателя действуют три момента: М — вращающий момент двигателя, Мс — статический момент сопротивления МJ — динамический момент. Эти моменты связаны уравнением:
М = Мс ± МJ= Мс ± J(dɷ/dt)
называемым основным уравнением движения электропривода.
При нарастании угловой скорости вращения, т.е. при возникновении ускорения, динамический момент препятствует этому нарастанию (знак + в уравнении) и он, суммируясь со статическим моментом сопротивления Мс, направлен против вращающего момента двигателя М.
При убывании угловой скорости вращения, т.е. при замедлении, динамический момент препятствует этому убыванию скорости (знак - в уравнении) и, вычитаясь из статического момента Мс, он уменьшает противодействие вращающему моменту двигателя М.
8 Дайте определение понятию «механическая характеристика». Изобразите примеры механических характеристик различных электродвигателей. Укажите на графиках основные величины, характеризующие механические характеристики. Объясните основные показатели механических характеристик.
Механической характеристикой двигателя называется зависимость его скорости от развиваемого момента ω(М) Различают естественную и искусственную характеристики двигателей.
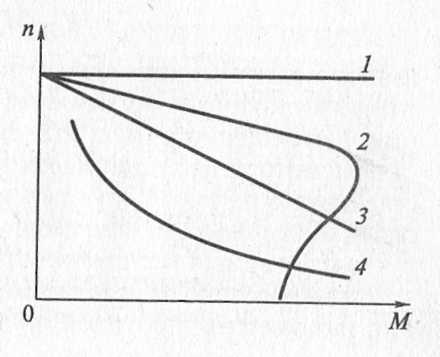
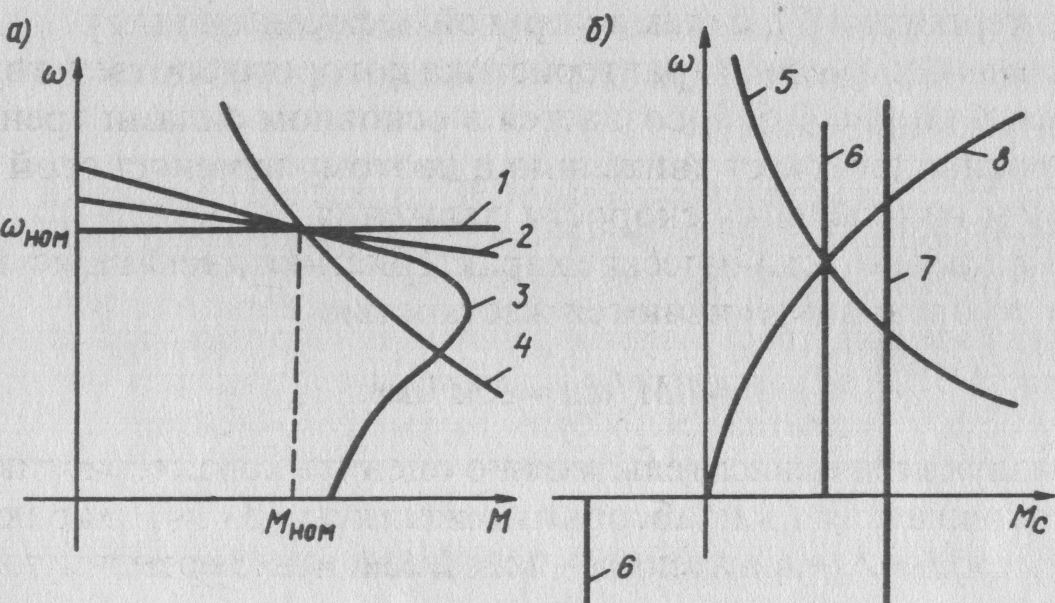 Естественная характеристика двигателя соответствует паспортной схеме его включения. Естественные механические характеристики приведены на рис. 2.5, (1 ...4 -соответственно синхронного, ДПТ НВ,АД и ДПТ ПсВ).
Естественная характеристика двигателя соответствует паспортной схеме его включения. Естественные механические характеристики приведены на рис. 2.5, (1 ...4 -соответственно синхронного, ДПТ НВ,АД и ДПТ ПсВ).
Если в электрические цепи ЭД включены дополнительные элементы (резисторы, реакторы, конденсаторы), или ЭД питается напряжением с неноминальными параметрами, то его характеристики будут искусственными.
Основные величины мех.характеристик:
1)нач. пусковой моментМпуск (или Мкз)развиваемый ЭД при ω=0
2)Ммах-наиб. момент, который развивает ЭД. Для АД Ммах=1.6-3,5Мном, для ДПТ: 2-8 Мном
3)скорость ид. хх, которую ЭД способен развивать при Мс=0 и Мэл.магн=0
4)жёсткость мех.характ.- величина, характеризующая степень изменения момента при изменении скорости β=dM/dω
Показатели регулирования скорости:
Диапазон регулирования скорости,определяемый отношением максимальной скорости к минимальной, т.е.D = ωmax/wmin.
Устойчивость или Стабильность скорости, характеризуемая изменением скорости при возможных колебаниях момента нагрузки.Определяетсяжесткостью его механических характеристик. СД-β=∞ , АД-как жёсткую(β  ), ДПТ ПсВ-мягкая.
), ДПТ ПсВ-мягкая.
Плавность регулирования, определяемая перепадом скорости при переходе с одной искусственной характеристики на другую. Чем больше в заданном диапазоне регулирования скорости может быть получено искусственных характеристик, тем плавнее будет происходить регулирование скорости.
Направление регулирования скорости.В зависимости от способа воздействия на ЭД его скорость может увеличиваться или уменьшаться по сравнению с номинальной.В первом случае говорят о регулировании скорости вверх от основной характеристики, во втором - вниз.
Экономичность регулирования скорости. Оценка или сопоставление экономических показателей проводится при выборе возможных способов регулирования скорости данного ЭП .
9 Дайте определения понятиям: «механическая» и «электромеханическая» характеристика. Объясните, какими показателями оцениваются механические характеристики. Изобразите примеры механических характеристик. Охарактеризуйте, как влияет жесткость характеристик на работу электродвигателя. К22-24
Механической характеристикой ЭД называется зависимость его скорости от развиваемого момента ω(М) при неизменных значениях других параметров, способных влиять на частоту вращения и величину момента двигателя (напряжения питания, величины тока в ОВ и т.п.); Электромеханические характеристики — зависимость частоты вращения от тока в ОЯ;Различают естественную и искусственную характеристики двигателей.
При оценке характеристик употребляют понятие жесткость характеристики. Количественно жесткость определяется отношением разности моментов ΔМ= М2–М1,развиваемых двигателем, к соответствующей разности частот вращения Δп =п1 - п2,
β = ΔМ/Δп
Для прямолинейной механической характеристики ее жесткость определяется тангенсом угла а наклона этой характеристики к оси ординат. Если же механическая характеристика криволинейна, то ее жесткость определяют в рабочей точке как тангенс угла наклона касательной, проведенной в этой точке характеристики, к оси ординат. Чем больше угол а, тем жестче характеристика; при а = 90° механическая характеристика расположена параллельно оси абсцисс и является абсолютно жесткой
Другим показателем является ее нелинейность, определяющая степень отклонения реальной характеристики от прямой линии.
Чем жёстче мех.хар-ка ЭД, тем устойчивее работа ЭД при колебаниях нагрузки на валу.
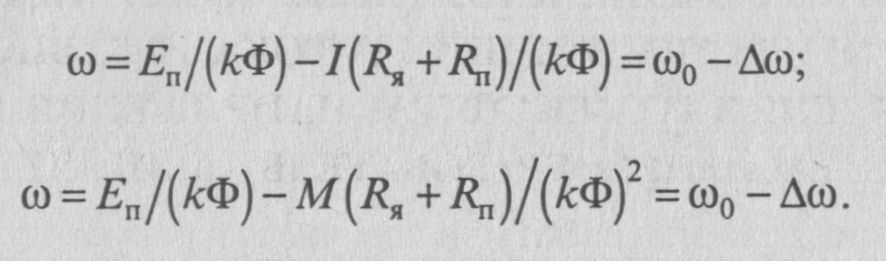
10 Запишите уравнение электромеханической характеристики ДПТ НВ. Объясните составляющие этого уравнения. Укажите, чем определяется скорость идеального холостого хода двигателя постоянного тока независимого возбуждения. Объясните, какие составляющие уравнения влияют на жесткость механической характеристики. К24-26

Электромеханическая характеристика ДПТ НВ
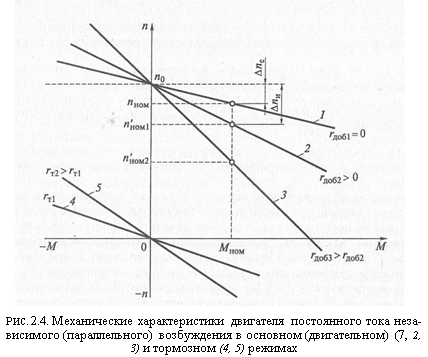
Механические характеристики ДПТ НВ имеют вид прямых линий, пересекающих ось ординат в точке n0.
Первое слагаемое уравнения механической характеристики,равное n0 =U/сеФ'
представляет собой пограничную частоту вращения (частоту вращения идеального холостого хода).
Второе слагаемое уравнения IR/сеФ — это перепад частоты вращения двигателя, вызванный изменением нагрузки двигателя, т.е. изменением электромагнитного момента на его валу.
Выражение показывает, что изменение частоты вращения двигателя, обусловленное изменением его нагрузки, пропорционально сопротивлению цепи якоряRя.
Поэтому наименьшему сопротивлению цепи якоря, когда гдоб = 0, соответствует наименьший перепад частоты вращения . При этом механическая характеристика становится наиболее жесткой .
При введении в цепь якоря внешнего резистора влияние нагрузки на перепад частоты вращения увеличиваетсяи характеристики становятся менее жесткими и угол их наклона к оси ординат уменьшается (графики 2 и 3).Таким образом, жесткость механических характеристик можно регулировать изменением сопротивления резистора гдоб, включенного последовательно в цепь якоря или изменением потока ОВ.
11 Изобразите основную схему включения двигателя постоянного тока независимого возбуждения и обозначьте параметры цепи обмотки якоря и обмотки возбуждения. Приведите основные уравнения для напряжения, электродвижущей силы и электромагнитного момента двигателя постоянного тока. Объясните порядок вывода уравнения электромеханической характеристики двигателя постоянного тока. Постройте график механической характеристики двигателя постоянного тока независимого возбуждения и объясните его вид.
Основная схема включения ДПТНВ: I, Iв, - соответственно токи в цепях обмоток якоря и возбуждения, , Е- ЭДС якоря, В; ω -угловая скорость, рад/с, М- момент, Нм, двигателя;
 - сопротивление якоря, состоящее из сопротивлений обмотки якоря, добавочных полюсов, компенсационной обмотки и щеточного контакта, Ом;
- сопротивление якоря, состоящее из сопротивлений обмотки якоря, добавочных полюсов, компенсационной обмотки и щеточного контакта, Ом;
Уравнения для напряжения, ЭДС якоря и электромагнитного момента будут иметь вид
где  полное сопротивление цепи якоря, Ом; Ф –магнитный
полное сопротивление цепи якоря, Ом; Ф –магнитный
поток, Вб;U - подводимое к якорю напряжение, В; к - конструктивный коэффициент двигателя;
Подставляя (4.2) в (4.1), получим формулу для электромеханической характеристики
Формула для механической характеристики :

 Электромеханическая и механическая характеристики ДПТНВ представляют собой линейные зависимости угловой скорости от тока и момента
Электромеханическая и механическая характеристики ДПТНВ представляют собой линейные зависимости угловой скорости от тока и момента
ω0- скорость идеального ххдвигателя:
 Способы реализации искусственных характеристик ДПТНВ: регулирование сопротивления добавочного резистора в цепи якоря Ял, магнитного потока Ф и подводимого к якорюнапряженияU.
Способы реализации искусственных характеристик ДПТНВ: регулирование сопротивления добавочного резистора в цепи якоря Ял, магнитного потока Ф и подводимого к якорюнапряженияU.
12 Дайте определение понятиям: «естественная» и «искусственная» механическая характеристика. Запишите уравнение механической и электромеханической характеристики двигателя постоянного тока. Объясните, изменением каких параметров регулируется скорость электродвигателя постоянного тока. Изобразите естественную механическую характеристику двигателя постоянного тока. К27
Механические характеристики двигателя, полученные при номинальных значениях напряжения на обмотках якоря и возбуждения и при отсутствии добавочных сопротивлений в цепи якоря, называют естественными (график 1).Если же хотя бы один из перечисленных параметров двигателя изменен (напряжение на обмотках якоря или возбуждения отличаются от номинальных значений, или же изменено сопротивление в цепи якоря), то механические характеристики наз. искусственными. Искусственные механические характеристики, полученные введением в цепь якоря добавочного сопротивления гдо6, называют также реостатными.
Электромеханическая характеристика
Механическая характеристика:
Электромеханическая и механическая характеристики ДПТНВ представляют собой линейные зависимости угловой скорости от тока и момента
ω0- скорость идеального ххдвигателя:
Способы реализации искусственных характеристик ДПТНВ: регулирование сопротивления добавочного резистора в цепи якоря Rя, магнитного потока Ф и подводимого к якорюнапряженияU.
13 Запишите уравнение электромеханической характеристики двигателя постоянного тока независимого возбуждения. Дайте определение понятию «реостатное регулирование скорости» двигателя постоянного тока независимого возбуждения. Объясните, почему при увеличении сопротивления реостатов уменьшается жесткость механической характеристики. Изобразите семейство реостатных характеристик.

Электромеханическая характеристика
Реостатное регулирование предполагает вкл. добавочных реостатов в цепь ОЯ ДПТ.
ɷ=U-I(Rя+Rдоб)/кФ. Способ применяется при невысоких требованиях к показателям качества регулирования скорости, отличаясь универсальностью и простотой реализации.
Скорость ω0 не зависит от Rд, а наклон характеристиктем больше, чем больше Rд.
Cемейство механических характеристик ДПТНВ –это совокупность линий различного наклона (жесткости), проходящих через одну и ту же точку на оси скорости с ординатой ω0. Характеристика 1 соответствует Rд = 0 и является естественной, искусственные характеристики2... 4построены при наличии в цепи якоря резисторов с сопротивлениями соответственноRД1<RД2<R,Д3.
Оценим данный способ регулирования скорости по основным показателям:
-Диапазон регулирования небольшой (обычно 2...3),т.к. снижается жесткость характеристик.
-Направление регулирования скорости - вниз от естественной характеристики.
-Плавность регулирования определяется характером изменения Ra. Если сопротивление изменяется плавно, то данный способ обеспечивает плавное регулирование.
-Стабильность скорости снижается по мере увеличения диапазона регулирования, так как уменьшается жесткость регулировочных характеристик.
-Экономичность регулирования.Затраты на приобретение добавочных резисторов небольшие (их стоимость невелика), но потери мощности и расход энергии оказываются существенными. 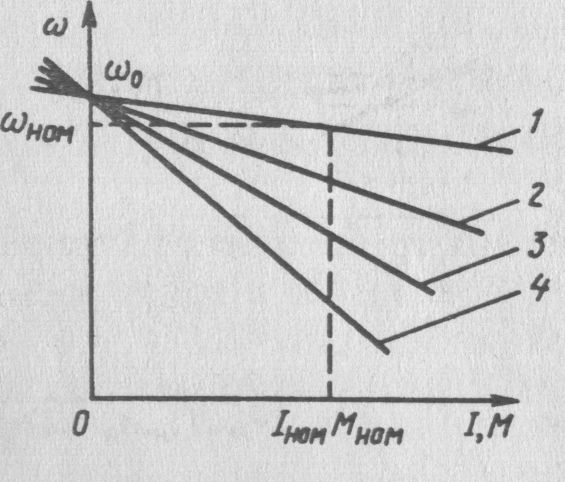 Так как при данном способе магнитный поток не изменяется и равен номинальному, то
Так как при данном способе магнитный поток не изменяется и равен номинальному, то

т.е. ДПТНВ может без перегрева работать на любой искусств. Хар-ке с моментом нагрузки, равным номинальному.
Если ДПТохлаждается с помощью вентилятора на своем валу, то момент нагрузки при снижении скорости необходимо также уменьшить из-за ухудшения вентиляции.
14 Дайте определение понятию «реостатное регулирование скорости» двигателя постоянного тока независимого возбуждения. Постройте реостатные характеристики двигателя постоянного тока независимого возбуждения. Объясните внешний вид реостатных характеристик двигателя постоянного тока независимого возбуждения. Оцените реостатное регулирование скорости двигателя постоянного тока независимого возбуждения основными показателями.
Реостатное регулирование предполагает вкл. Добавочных реостатов в цепь ОЯ ДПТ.
Способ применяется при невысоких требованиях к показателям качества регулирования скорости, отличаясь в то же время универсальностью и простотой реализации.
Скорость ω0 не зависит от Rд, а наклон характеристиктем больше, чем больше Rд.
Cемейство механических характеристик ДПТНВ –это совокупность линий различного наклона (жесткости), проходящих через одну и ту же точку на оси скорости с ординатой ω0. Характеристика 1 соответствует случаю, когда Rд = 0 и является естественной, искусственные характеристики2... 4построены при наличии в цепи якоря резисторов с сопротивлениями соответственноRД1<RД2<R,Д3.
Оценим данный способ регулирования скорости по основным показателям:
-Диапазон регулирования небольшой (обычно 2...3),т.к. снижается жесткость характеристик.
-Направление регулирования скорости - вниз от естественной характеристики.
-Плавность регулирования определяется характером изменения Ra. Если сопротивление изменяется плавно, то данный способ обеспечивает плавное регулирование.
-Стабильность скорости снижается по мере увеличения диапазона регулирования, так как уменьшается жесткость регулировочных характеристик.
-Экономичность регулирования.Затраты на приобретение добавочных резисторов небольшие (их стоимость невелика), но потери мощности и расход энергии оказываются существенными. Так как при данном способе магнитный поток не изменяется и равен номинальному, то
т.е. ДПТНВ может без перегрева работать на любой искусств. Хар-ке с моментом нагрузки, равным номинальному.
Если ДПТохлаждается с помощью вентилятора на своем валу, то момент нагрузки при снижении скорости необходимо также уменьшить из-за ухудшения вентиляции.
15 Запишите уравнение электромеханической характеристики двигателя постоянного тока независимого возбуждения. Изобразите механические характеристики при регулировании напряжения питания якоря. Поясните, почему при этом способе регулирования жесткость характеристик не меняется. Охарактеризуйте область применения такого способа регулирования скорости. М65
Электромеханическая характеристика
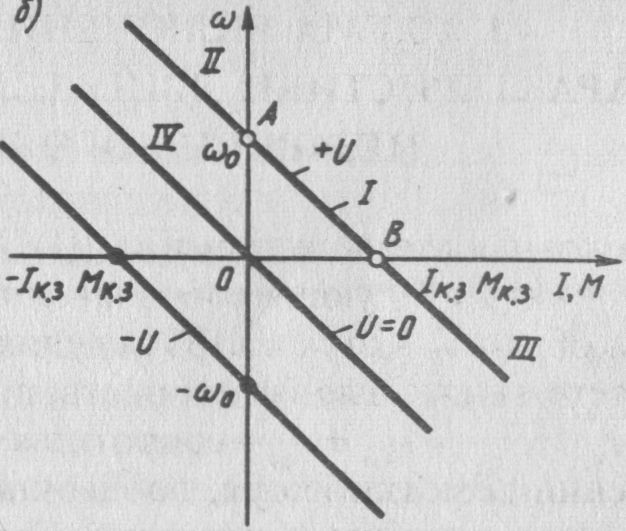
При измененииU пропорционально изменяется скорость ххω0, а искусственные характеристики остаютсялинейными и параллельными друг другу. 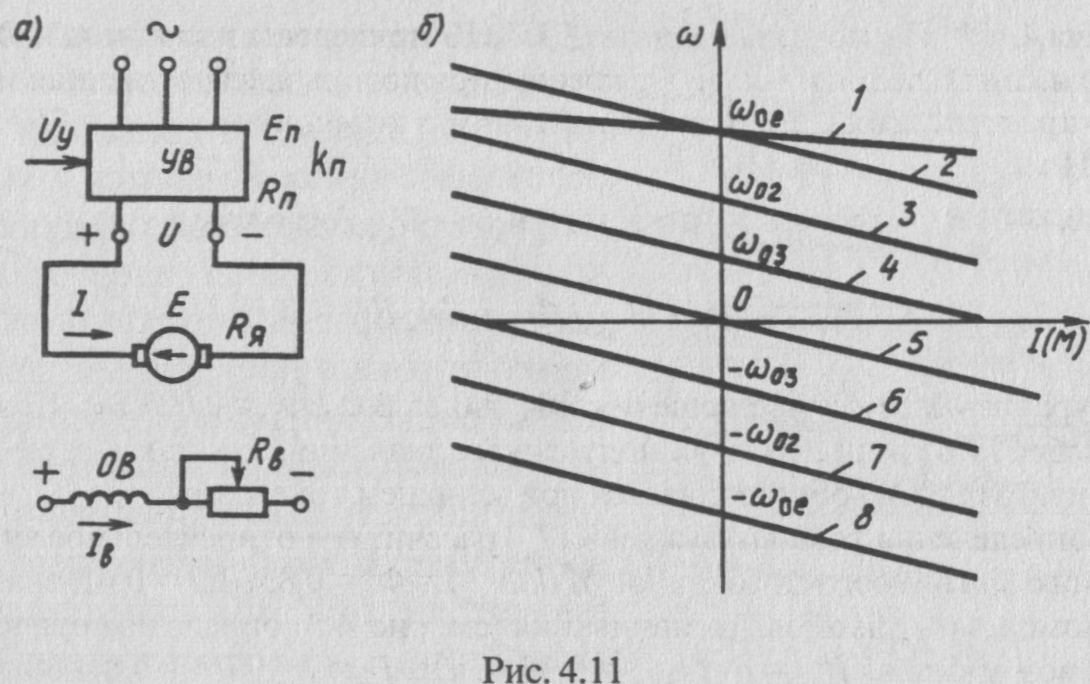
Система ТП - Дявляется высокоэффективным регулируемым ЭП постоянного тока и широко применяется для привода таких ответственных рабочих машин, как прокатные станы, металлорежущие станки, экскаваторы и др.
16 Укажите, какими способами можно изменять магнитный поток обмотки возбуждения двигателя постоянного тока независимого возбуждения. Опишите, как регулируется скорость двигателя постоянного тока независимого возбуждения при изменении магнитного потока обмотки возбуждения. Изобразите механические характеристики при регулировании скорости двигателя постоянного тока магнитным потоком обмотки возбуждения. Оцените регулирование скорости магнитным потоком обмотки возбуждения основными показателями.
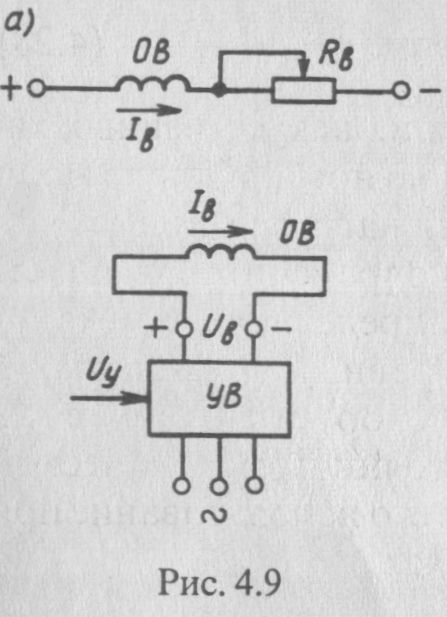
Регулирование тока в цепи возбуждения может осуществляться или с помощью добавочного резистораRb(рис. а), или изменением напряжения питания ОВ, например с помощью управляемого выпрямителя УВ (рис.б).
 Магнитный поток при регулировании скорости обычно уменьшают по сравнению с номинальным за счет снижения тока возбуждения. Двигатель конструируется таким образом, что бы его магнитная система была близка к насыщению, поэтому увеличение тока возбуждения не приводит к заметному увеличению магнитного потока.
Магнитный поток при регулировании скорости обычно уменьшают по сравнению с номинальным за счет снижения тока возбуждения. Двигатель конструируется таким образом, что бы его магнитная система была близка к насыщению, поэтому увеличение тока возбуждения не приводит к заметному увеличению магнитного потока.
 Уменьшение магнитного потока приводит к увеличению скорости идеального хх ω0.
Уменьшение магнитного потока приводит к увеличению скорости идеального хх ω0.
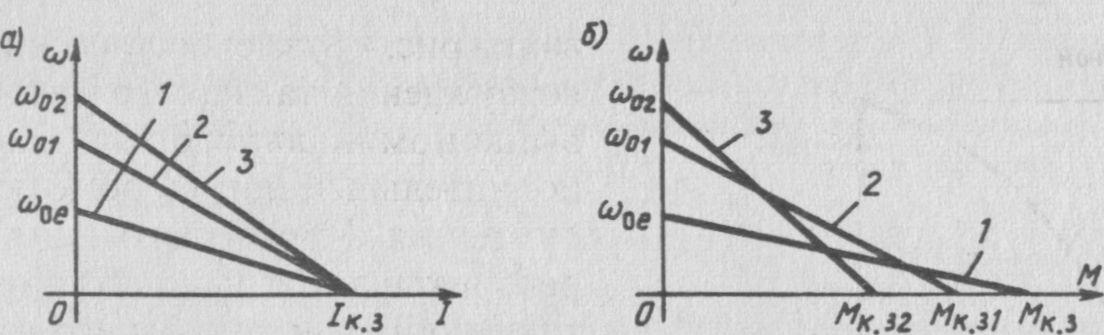
Ток короткого замыкания Iк = U/Rя, от магнитного потока не зависит.Электромеханические характеристики при различных значениях магнитного потока Фном> Ф1, >Ф2, будут иметь вид прямых 1...3, представленных на рис. 4.10, а.
Момент короткого замыканияМК3=кФIкз, будет также снижаться, так как Iкз = const. Значит, механические характеристики двигателя будут иметь вид прямых, показанных на рис.
 Так как при данном способе Фи< Фпом, то и Мдоп<Мном, т. е. и двигатель по условиям нагрева не может быть нагружен на искусственных характеристиках номинальным моментом.
Так как при данном способе Фи< Фпом, то и Мдоп<Мном, т. е. и двигатель по условиям нагрева не может быть нагружен на искусственных характеристиках номинальным моментом.
 Показатели данного способа:
Показатели данного способа:
-диапазон регулирования 3 ...4; -направлениерегулирования:- вверх от естественной характеристики;
-плавность регулирования определяется плавностью регулирования тока возбуждения;
-стабильность скорости достаточно высокая, хотя она и снижается при уменьшении магнитного потока.
-Способ экономичен, так как регулирование скорости не сопровождается значительными потерями мощности, а реализация его не требует больших капитальных затрат.
Этот способ находит широкое применение в ЭП вследствие простоты его реализации и экономичности, так как регулирование осуществляется в относительно маломощной цепи возбуждения двигателя и не сопровождается большими потерями мощности.
17 Запишите уравнение электромеханической характеристики двигателя постоянного тока независимого возбуждения. Изобразите механические характеристики при регулировании скорости двигателя постоянного тока магнитным потоком обмотки возбуждения. Поясните изменение жесткости механических характеристик, при регулировании магнитного потока. Охарактеризуйте область применения такого способа регулирования скорости.
Электромеханическая характеристика
Регулирование тока в цепи возбуждения может осуществляться или с помощью добавочного резистораRb(рис. а), или изменением напряжения питания ОВ, например с помощью управляемого выпрямителя УВ (рис.б).
Магнитный поток при регулировании скорости обычно уменьшают по сравнению с номинальным за счет снижения тока возбуждения. Двигатель конструируется таким образом, что бы его магнитная система была близка к насыщению, поэтому увеличение тока возбуждения не приводит к заметному увеличению магнитного потока.
Уменьшение магнитного потока приводит к увеличению скорости идеального хх ω0. Ток короткого замыкания Iк = U/Rя, т.е. от магнитного потока не зависит.Электромеханические характеристики при различных значениях магнитного потока Фном> Ф1, >Ф2, будут иметь вид прямых 1...3, представленных на рис. 4.10, а.
Момент короткого замыканияМК3=кФIкз, будет также снижаться, так как Iкз = const. Значит, механические характеристики двигателя будут иметь вид прямых, показанных на рис.
Так как при данном способе Фи< Фпом, то и Мдоп<Мном, т. е. и двигатель по условиям нагрева не может быть нагружен на искусственных характеристиках номинальным моментом.
Применяется в ЭП металлорежущих станков при чистовой обработке для повышения скорости резания.
18 Укажите, какими способами изменяют напряжение питания двигателя постоянного тока независимого возбуждения для регулирования его скорости. Изобразите семейство механических характеристик электродвигателя при регулировании напряжения питания якоря. Объясните внешний вид механических характеристик при регулировании напряжения якоря. Охарактеризуйте регулирование скорости двигателя постоянного тока независимого возбуждения с помощью напряжения питания якоря основными показателями.
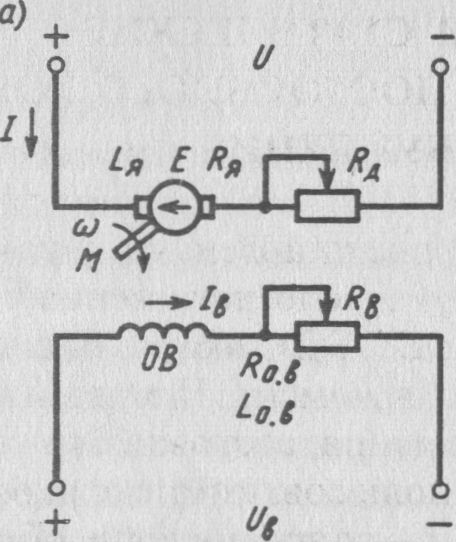
Реализация этого способа:питание якоря ДПТНВ от преобразователя, выходное напряжение которого регулируется по значению; Е- ЭДС УВ; Rn - внутреннее сопротивление УВ; кп=Eп/Uy - коэффициент усиления УВ, гдеUy - входной сигнал управления.
 Формулы электромеханической и механической характеристик
Формулы электромеханической и механической характеристик
При измененииЕп пропорционально изменяется скорость ххω0, а искусственные характеристики оставаясь линейными и параллельными друг другу, имеют по сравнению с естественной характеристикой 1 больший наклон из-за наличия сопротивленияRn
Всистеме Г-Д, якорьдвигателя присоединяется к якорю генератора. Регулирование напряжения на якоре двигателя происходит за счет изменения тока возбуждения генератора. Показатели:
1)Диапазон регулирования  10
10
2)Направление регулирования-вниз от номинальной скорости
3)Жёсткость характеристик не изменяется
4)Плавность регулирования высокая
5)Экономичность-высокая
19* Назовите основные способы импульсного регулирования скорости двигателя постоянного тока независимого возбуждения. Запишите формулу для определения скважности работы ключа. Изобразите упрощенную схему импульсного регулирования сопротивления в цепи якоря. Объясните принцип ее работы.
Импульсное регулирование сопротивления добавочного резистора в цепи якоря:
 осуществляется периодической коммутацией (замыкания и размыкания) ключа 1, включенного параллельно резистору 2 с сопротивлениемR .
осуществляется периодической коммутацией (замыкания и размыкания) ключа 1, включенного параллельно резистору 2 с сопротивлениемR .
При γ= 1 резистор 2 выведен из цепи якоря 3 и ЭД работает на естественной характеристике4.Если γ= 0, резистор 2 введен в цепь якоря и ЭД работает по искусственной характеристике6.При 0 <γ< 1 механические характеристики 5располагаются между двумя граничными характеристиками.
При импульсном регулировании магнитного потока:в цепь ОВ 4включен добавочный резистор 3, шунтированный ключом 2.
При импульсном регулировании напряжения на якоре:
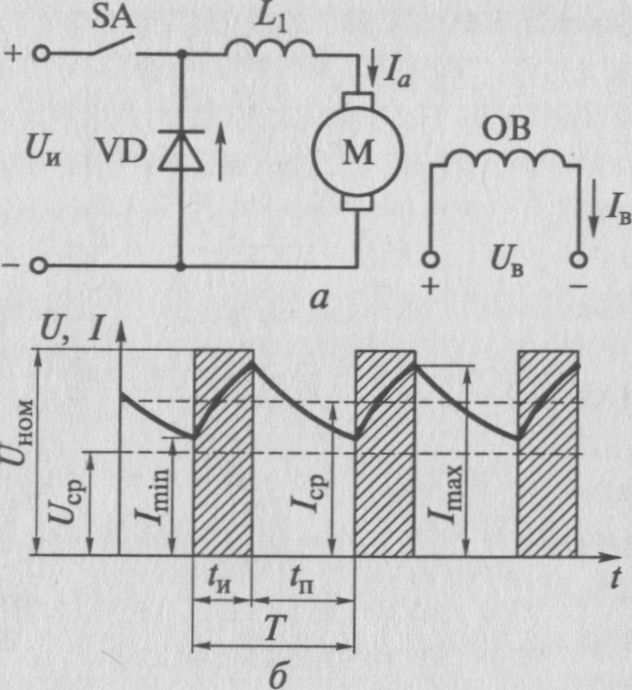 цепь якоря периодически подключается к сети напряжениемUи,а затем отключается посредством ключа SA(обычно бесконтактного).
цепь якоря периодически подключается к сети напряжениемUи,а затем отключается посредством ключа SA(обычно бесконтактного).
Основным показателем работы ключаявляется скважность его работы:

где t0- время разомкнутого состояния ключа; tз- время замкнутого состояния ключа.
 На диаграмме импульсы напряжения имеют прямоугольную форму высотойUHOM.При этом импульсы продолжительностьюtиЧередуются с паузами tn.За время импульса ток в цепи якоря Iа, нарастает постепенно, достигая в конце импульса наибольшего значения Iтах. При размыкании цепи ключом SA, ток якоря не исчезает, а, замыкаясь через диод VD, уменьшается постепенно, достигнув значенияImin, так как поддерживается за счет ЭДС самоиндукции, наводимой дросселем L.Напряжение на якоре
На диаграмме импульсы напряжения имеют прямоугольную форму высотойUHOM.При этом импульсы продолжительностьюtиЧередуются с паузами tn.За время импульса ток в цепи якоря Iа, нарастает постепенно, достигая в конце импульса наибольшего значения Iтах. При размыкании цепи ключом SA, ток якоря не исчезает, а, замыкаясь через диод VD, уменьшается постепенно, достигнув значенияImin, так как поддерживается за счет ЭДС самоиндукции, наводимой дросселем L.Напряжение на якоре
где γ =tИ /Tскважность.
 Частота вращения двигателя при импульсном регулировании, об/мин,
Частота вращения двигателя при импульсном регулировании, об/мин,
19 Назовите основные способы регулирования напряжения питания обмотки якоря двигателя постоянного тока независимого возбуждения. Запишите формулу для определения скважности работы ключа. Изобразите упрощенную схему импульсного регулирования напряжения обмотки якоря. Объясните принцип ее работы.
Напряжение питания ОЯДПТ НВ регулируют с помощью УВ (фазовый способ) и импульсных преобразователей (ШИП и ЧИП).
Основным показателем работы ключаявляется скважность его работы:
где t0- время разомкнутого состояния ключа; tз- время замкнутого состояния ключа.
При импульсном регулировании напряжения на якоре:
цепь якоря периодически подключается к сети напряжениемUи,а затем отключается посредством ключа SA(обычно бесконтактного).
Импульсы продолжительностьюtиЧередуются с паузами tn.За время импульса ток в цепи якоря Iа, нарастает постепенно, достигая в конце импульса наибольшего значения Iтах. При размыкании цепи ключом SA, ток якоря не исчезает, а, замыкаясь через диод VD, уменьшается постепенно, достигнув значенияImin, так как поддерживается за счет ЭДС самоиндукции, наводимой дросселем L.
На диаграмме импульсы напряжения имеют прямоугольную форму высотойUHOM.
Напряжение на якоре
где γ =tИ /Tскважность.
Частота вращения двигателя при импульсном регулировании, об/мин,
20* Перечислите способы импульсного регулирования скорости двигателя постоянного тока независимого возбуждения. Укажите, что является основным показателем работы «ключа» при импульсном регулировании скорости. Изобразите упрощенную схему импульсного регулирования скорости двигателя постоянного тока и диаграммы изменения напряжения и тока. Объясните основные отличия широтно-импульсного способа регулирования скорости от частотно-импульсного.
Импульсное регулирование сопротивления добавочного резистора в цепи якоря:
осуществляется периодической коммутацией (замыкания и размыкания) ключа 1, включенного параллельно резистору 2 с сопротивлениемR .
При γ= 1 резистор 2 выведен из цепи якоря 3 и ЭД работает на естественной характеристике4.Если γ= 0, резистор 2 введен в цепь якоря и ЭД работает по искусственной характеристике6.При 0 <γ< 1 механические характеристики 5располагаются между двумя граничными характеристиками.
При импульсном регулировании магнитного потока:в цепь ОВ 4включен добавочный резистор 3, шунтированный ключом 2.
При импульсном регулировании напряжения на якоре:
цепь якоря периодически подключается к сети напряжениемUи,а затем отключается посредством ключа SA(обычно бесконтактного).
Основным показателем работы ключа является скважность его работы:
где t0- время разомкнутого состояния ключа; tз- время замкнутого состояния ключа.
На диаграмме импульсы напряжения имеют прямоугольную форму высотойUHOM.При этом импульсы продолжительностьюtиЧередуются с паузами tn.За время импульса ток в цепи якоря Iа, нарастает постепенно, достигая в конце импульса наибольшего значения Iтах. При размыкании цепи ключом SA, ток якоря не исчезает, а, замыкаясь через диод VD, уменьшается постепенно, достигнув значенияImin, так как поддерживается за счет ЭДС самоиндукции, наводимой дросселем L.Напряжение на якоре
где γ =tИ /Tскважность.
Частота вращения двигателя при импульсном регулировании, об/мин,
На практике применяются два основных способа управления ключом - широтно-импульсная и частотно-импульсная модуляции. При ШИМ период коммутации ключа Тостается постоянным, а изменяется времяtз т.е. изменяется ширина импульов. При ЧИМ время tzостается неизменным, а меняется период коммутации ключа Т, который обратно пропорционален частоте коммутации.
20Назовите основные способы регулирования напряжения питания обмотки якоря двигателя постоянного тока независимоговозбуждения.Укажите, что является основным показателем работы «ключа» при импульсном регулировании скорости. . Изобразите упрощенную схему импульсного регулирования напряжения обмотки якоряОбъясните основные отличия широтно-импульсного способа регулирования скорости от частотно-импульсного.
Напряжение питания ОЯДПТ НВ регулируют с помощью УВ (фазовый способ) и импульсных преобразователей (ШИП и ЧИП).
Основным показателем работы ключа является скважность его работы:
где t0- время разомкнутого состояния ключа; tз- время замкнутого состояния ключа.
При импульсном регулировании напряжения на якоре:
цепь якоря периодически подключается к сети напряжениемUи,а затем отключается посредством ключа SA(обычно бесконтактного).
При этом импульсы продолжительностьюtиЧередуются с паузами tn.За время импульса ток в цепи якоря Iа, нарастает постепенно, достигая в конце импульса наибольшего значения Iтах. При размыкании цепи ключом SA, ток якоря не исчезает, а, замыкаясь через диод VD, уменьшается постепенно, достигнув значенияImin, так как поддерживается за счет ЭДС самоиндукции, наводимой дросселем L.Напряжение на якоре
где γ =tИ /Tскважность.
На практике применяются два основных способа управления ключом - широтно-импульсная и частотно-импульсная модуляции. При ШИМ период коммутации ключа Тостается постоянным, а изменяется времяtз т.е. изменяется ширина импульов. При ЧИМ время tzостается неизменным, а меняется период коммутации ключа Т, который обратно пропорционален частоте коммутации.
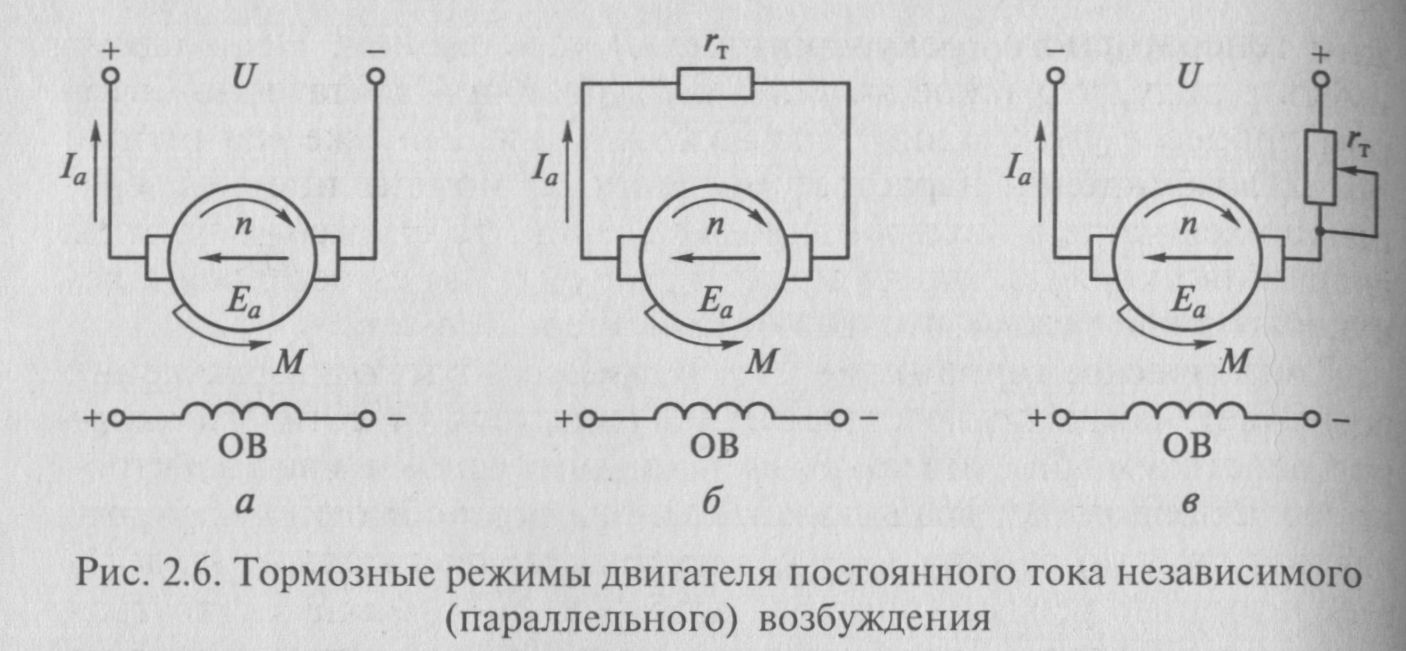
21 Перечислите виды торможения двигателя постоянного тока независимого возбуждения. Изобразите упрощенные схемы тормозных режимов двигателей постоянного тока независимого возбуждения. Опишите условия возникновения различных режимов торможения. Поясните, какой из режимов торможения способствует энергосбережению.
 К363
К363
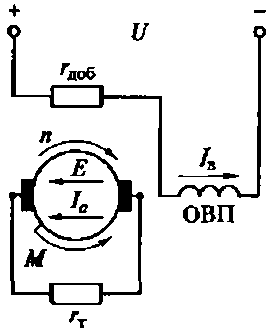
Динамическое Генераторное Противовключение
Динамическое торможение возникает, когда после отключения двигателя от сети его якорь под действием кинетической энергии продолжает вращаться. Если обмотку якоря, отключив от сети, замкнуть на резистор гг, то двигатель перейдет в генераторный режим (ОВ остаётся включенной в сеть). Вырабатываемая при этом электроэнергия преобразуется в теплоту, которая выделяется в сопротивлении.
Генераторный режим возможен в двигателях независимого (параллельного) и смешанного возбуждения, когда частота вращения якоря превышает частоту вращения идеального ХХ ω0. Практически это происходит, если под действием внешнего вращающего момента, действующего на вал двигателя, частота вращения увеличивается до значения, превышающего частоту вращения идеальногохх, т. е. когда п>п0.Его применяют в электротранспортных средствах, при частых остановках и движении под уклон: кинетическая энергия транспортного средства (трамвай, троллейбус, электропоезд) преобразуется в электрическую энергию и возвращается в сеть.
Торможение противовключением применяют,чтобы уменьшить время выбега, при отключении двигателя от сети. С этой целью изменяют полярность напряжения обмотки якоря (полярность обмотки возбуждения должна остаться прежней) и напряжение питания обмотки якоря становится отрицательным (-Ua).
Энергия, расходуемая при торможении двигателя, равна кинетической энергии, запасенной в движущихся частях электропривода при его пуске. Энергосберегающийэффела: при торможении зависит от способа торможения. Наибольший энергосберегающий эффект происходит при генераторном рекуперативном торможении с отдачей энергии в сеть.При динамическом торможении двигатель отключается от сети, поэтому потери энергии при динамическом торможении не происходит. Наибольшие потери энергии происходят при торможении противовключением, когда расход электроэнергии ранен трехкратному значению энергии, рассеиваемой в двигателе при динамическом торможении.
22 Изобразите упрощенную схему реализации динамического торможения двигателя постоянного тока независимого возбуждения. Опишите условия реализации динамического торможения двигателя постоянного тока независимого возбуждения. Запишите формулу для определения тока якоря в режиме динамического торможения. Объясните, чем определяется наклон механических характеристик в режиме динамического торможения.
Необходимость в таком торможении возникает, когда после отключения двигателя от сети его якорь под действием кинетической энергии продолжает вращаться. Если обмотку якоря, отключив от сети, замкнуть на резистор гг, то двигатель перейдет в генераторный режим (ОВ остаётся включенной в сеть). Вырабатываемая при этом электроэнергия преобразуется в теплоту, которая выделяется в сопротивлении.
 В режиме динамического торможения ЭДС якоря не изменяет своего направления, но так как якорь отключен от сети (U= 0), то источником тока якоря становится ЭДС Еа, которая в двигательном режиме направлена противоположно напряжению сети. В итоге ток меняет свое направление
В режиме динамического торможения ЭДС якоря не изменяет своего направления, но так как якорь отключен от сети (U= 0), то источником тока якоря становится ЭДС Еа, которая в двигательном режиме направлена противоположно напряжению сети. В итоге ток меняет свое направление
т.е. становится отрицательным. В результате электромагнитный момент станет тормозящим
 Сопротивление резистора гТ,
Сопротивление резистора гТ,
где Еат и Iот— ЭДС и ток якоря в режиме динамического торможения.
Слишком маленький ток затягивает процесс торможения, делает его малоэффективным, а слишком большой ток может нарушить работу щеточно-коллекторного узла (сильное искрение или даже «круговой огонь» на коллекторе).Наклон характеристик и начальный тормозной момент зависит от сопротивления резистора гт
ωхх
R1  R2
R2
Мт1 Мт2
23 Назовите условия для возникновения генераторного режима в двигателе постоянного тока независимого возбуждения. Запишите и объясните выражения для тока якоря в режиме генераторного торможения. Изобразите механические характеристики двигателя постоянного тока независимого возбуждения в режиме генераторного торможения. Объясните область применения генераторного торможения двигателя постоянного тока независимого возбуждения.
Этот режим возможен в двигателях независимого (параллельного) и смешанного возбуждения, когда частота вращения якоря превышает частоту вращения идеального ХХ ω0. Практически это происходит, если под действием внешнего вращающего момента, действующего на вал двигателя, частота вращения увеличивается до значения, превышающего частоту вращения идеальногохх, т. е. когда п>п0.
В этих условиях ЭДС машины Еа= сеФп увеличивается до значения, превышающего напряжение питающей сети (Еа>UH0M),при этом ток якоря и электромагнитный момент меняют свое направление. -  .В итоге ДПТ переходит в генераторный режим и вырабатываемую при этом электроэнергию отдает в сеть. Электромагнитный момент Мдвигателя становится тормозящим, т.е. он противодействует внешнему вращающему моменту.Торможение продолжается пока частота вращения, уменьшаясь, не достигнет значения п0.
.В итоге ДПТ переходит в генераторный режим и вырабатываемую при этом электроэнергию отдает в сеть. Электромагнитный момент Мдвигателя становится тормозящим, т.е. он противодействует внешнему вращающему моменту.Торможение продолжается пока частота вращения, уменьшаясь, не достигнет значения п0.
Это наиболее экономичное торможение, так как энергия возвращается в сеть. Его применяют в электротранспортных средствах, при частых остановках и движении под уклон: кинетическая энергия транспортного средства (трамвай, троллейбус, электропоезд) преобразуется в электрическую энергию и возвращается в сеть.
Механические характеристики ДПТ НВ в режиме генераторного рекуперативного торможения прямолинейны и являются продолжением механических характеристик двигательного режима во второй квадрант осей координат .
ωхх 1
ωхх 2
М
24 Назовите условия возникновения динамического торможения двигателя постоянного тока независимого возбуждения. Запишите выражение для тока якоря в режиме динамического торможения, объясните. Изобразите механические характеристики двигателя постоянного тока независимого возбуждения в режиме динамического торможения. Объясните, как влияет величина добавочного сопротивления на процесс динамического торможения двигателя постоянного тока независимого возбуждения.
Необходимость в таком торможении возникает, когда после отключения двигателя от сети его якорь под действием кинетической энергии продолжает вращаться. Если обмотку якоря, отключив от сети, замкнуть на резистор гг, то двигатель перейдет в генераторный режим (ОВ остаётся включенной в сеть). Вырабатываемая при этом электроэнергия преобразуется в теплоту, которая выделяется в сопротивлении.
В режиме динамического торможения ЭДС якоря не изменяет своего направления, но так как якорь отключен от сети (U= 0), то источником тока якоря становится ЭДС Еа, которая в двигательном режиме направлена противоположно напряжению сети. В итоге ток меняет свое направление
т.е. становится отрицательным. В результате электромагнитный момент станет тормозящим
Сопротивление резистора гТ,
где Еат и Iот— ЭДС и ток якоря в режиме динамического торможения.
Слишком маленький ток затягивает процесс торможения, делает его малоэффективным, а слишком большой ток может нарушить работу щеточно-коллекторного узла (сильное искрение или даже «круговой огонь» на коллекторе).Наклон характеристик и начальный тормозной момент зависит от сопротивления резистора гт
ωхх
R1 R2
Мт1 Мт2
25 Назовите условия возникновения торможения противовключением двигателя постоянного тока независимого возбуждения. Запишите и объясните выражение для тока якоря в режиме торможения противовключением. Изобразите механические характеристики двигателя постоянного тока независимого возбуждения в режиме торможения противовключением. Объясните область применения торможения противовключением двигателя постоянного тока независимого возбуждения.
 Торможение противовключением. Чтобы уменьшить время выбега, при отключении двигателя от сети применяют торможение противовключением. С этой целью изменяют полярность напряжения обмотки якоря (полярность обмотки возбуждения должна остаться прежней) и напряжение питания обмотки якоря становится отрицательным (-Ua).
Торможение противовключением. Чтобы уменьшить время выбега, при отключении двигателя от сети применяют торможение противовключением. С этой целью изменяют полярность напряжения обмотки якоря (полярность обмотки возбуждения должна остаться прежней) и напряжение питания обмотки якоря становится отрицательным (-Ua).
Так как направление магнитного потока не изменилось, то ЭДС якоря Еа также не меняет своего направления и действует согласно с напряжением на обмотке якоря (-Ua).При этом ток якоря создается суммой напряжения–Uа и ЭДС якоря Еа.
 В этих условиях ток якоря, а следовательно, и электромагнитный момент становятся отрицательными.Чтобы ток якоря в этих условиях не превысил допустимого значения, в цепь обмотки якоря включают резистор сопротивлением гт.
В этих условиях ток якоря, а следовательно, и электромагнитный момент становятся отрицательными.Чтобы ток якоря в этих условиях не превысил допустимого значения, в цепь обмотки якоря включают резистор сопротивлением гт.
 И ток будет ограничен сопротивлением
И ток будет ограничен сопротивлением
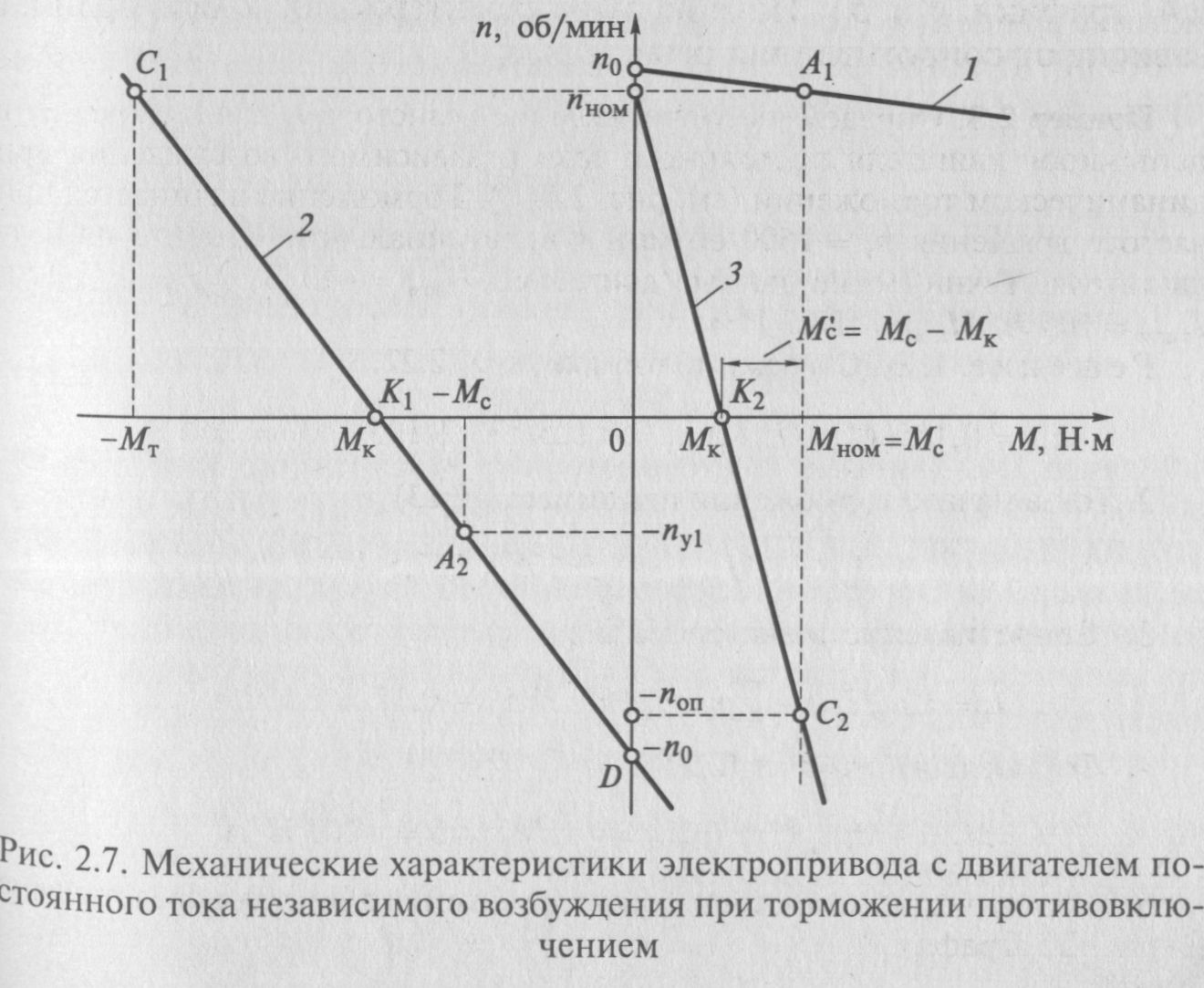
Под действием тормозящего момента -Мт частота вращения якоря уменьшается, достигнув нулевого значения (точка К). Если в этот момент цепь якоря не отключить от сети, то произойдет реверсирование двигателя .
Торможение противовключением используется в подъемных устройствах, Допустим двигатель работает на подъем груза.Для опускания грузаGмассой т в цепь якоря двигателя вводят добавочный резистор сопротивлением гт1. При этом статический момент сопротивления Мс, создаваемый грузомG,превысит наибольшее значение электромагнитного момента двигателя Мк.Под действием этого груз будет опускаться, При этом электромагнитный момент двигателя станет тормозящим.
Скорость опускания груза с использованием метода торможения противовключением зависит от сопротивления резистора гт: чем больше гТ, тем «мягче» механическая характеристика и тем с большей скоростью опускается грузG.
26Изобразите основную схему включения двигателя постоянного тока последовательного возбуждения. Запишите уравнение механической и электромеханической характеристики двигателя постоянного тока последовательного возбуждения. Объясните вид механических характеристик двигателя постоянного тока последовательного возбуждения. Охарактеризуйте область применения двигателя постоянного тока последовательного возбуждения.
| – |
| Rя |
| + |
| ОВ |
| Rд |
| U |
| Е |
| М |
Iя = Iов
Уравнение электромеханической характеристики 
Уравнение механической характеристики 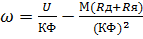
Эти двигатели обладают свойством изменять в широких пределах угловую скорость и момент при колебаниях нагрузки. Уравнение механических характеристик аналогичны ДПТ НВ, но т.к. магнитный поток этих ЭД зависит от тока якоря (от нагрузки), то при работе двигателя он не остается постоянным. В частности, в режиме холостого хода, когда ток якоря ≈ 0 ( момент = 0) магнитный поток Ф ≈ 0, поэтому скорость не ограничено возрастает. По этой причине для этих двигателей опасен режим холостого хода и с ними не используют ременные передачи из-за опасности обрыва ремня и перехода ЭД в режим хх.
Электромагнитный момент этих двигателей зависит не только от тока якоря, но и от тока обмотки возбуждения, причем Iя = Iов, поэтому М = КФIя≈КФIя2, т.е. при пуске эти двигатели развивают очень большой момент, что важно для транспортных механизмов.
Скорость ω с увеличинием нагрузки уменьшается в значительной степени, т.к. увеличивается не только Iя, но и Ф. Такая характеристика называется мягкой.
ВДПТ ПсВпри увеличении момента нагрузки в 4 раза потребляемая мощностьвозрастает лишь в 2 раза, а в ДПТ НВ— в четыре раза: при последовательном возбуждении увеличение нагрузки сопровождается одновременным ростом как тока якоря, так и магнитного потока ОВ, и оба этих параметра способствуют увеличению вращающего момента , Это свойство ДПТ ПсВопределяет области их применения — привод механизмов с тяжелыми условиями пуска и работы: частые пуски, реверсы, перегрузки. Обычно они применяются для привода подъемных устройств и на электрическом транспорте в качестве тяговых двигателей (эскалаторы метрополитенов, электропоезда, троллейбусы,трамваи, метро, электровозы), в конвейерах, различных тяговых механизмах (маховики, гильотиновые ножницы).
27 Укажите основной отличительный признак двигателя постоянного тока последовательного возбуждения. Объясните уравнение электромеханической характеристики. Изобразите основную схему включения двигателя постоянного тока последовательного возбуждения. Объясните, почему для двигателя постоянного тока последовательного возбуждения опасен режим холостого хода.
Отличительный признак двигателя постоянного тока последовательного возбуждения: последовательное соединение ОВ и ОЯ, и ток ОЯ = току ОВ.
| Rя |
| + |
| ОВ |
| Rд |
| Е |
| М |
Iя = Iов
Уравнение электромеханической характеристики
Уравнение механической характеристики
Эти двигатели обладают свойством изменять в широких пределах угловую скорость и момент при колебаниях нагрузки. Уравнение механических характеристик аналогичны ДПТ НВ, но т.к. магнитный поток этих ЭД зависит от тока якоря (от нагрузки), то при работе двигателя он не остается постоянным. В частности, в режиме холостого хода, когда ток якоря ≈ 0 ( момент = 0) магнитный поток Ф ≈ 0, поэтому скорость не ограничено возрастает. По этой причине для этих двигателей опасен режим холостого хода и с ними не используют ременные передачи из-за опасности обрыва ремня и перехода ЭД в режим хх.
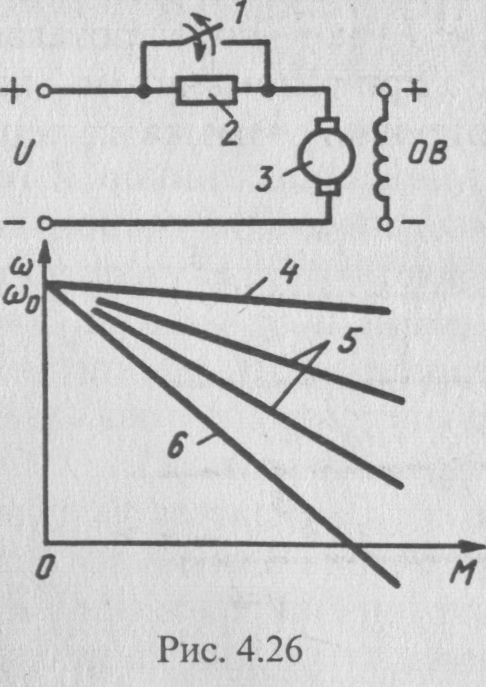
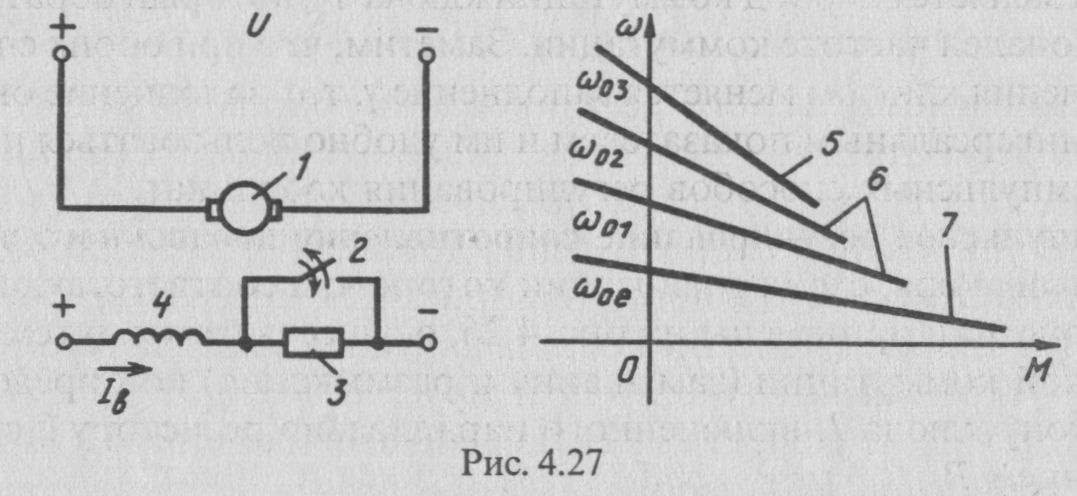
28 Перечислите способы регулирования скорости двигателя постоянного тока последовательного возбуждения. Запишите уравнение электромеханической характеристики двигателя постоянного тока последовательного возбуждения. Объясните сущность регулирования скорости двигателя постоянного тока последовательного возбуждения изменением напряжения питания. Изобразите семейство механических характеристик изменением напряжения питания. М89
Скорость ДПТ ПсВможно регулировать:
- изменением магнитного потока ОВ (параллельно ОВ вкл. резистор),
- изменением напряжения, схема реализации и характеристики которого приведены на рис. 4.36, двигатель 2 подключается к управляемому выпрямителю.
- шунтированием якоря резистором.Этоиспользуется для получения пониженных скоростей ЭП.
Уравнение электромеханической характеристики
Уравнение механической характеристики
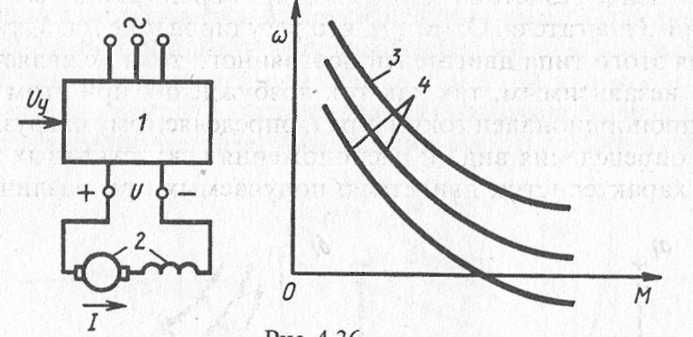
При регулировании скорости изменением напряжения, двигатель 2 подключается к управляемому выпрямителю 1. Выходное напряжение этого выпрямителя регулируется в соответствии с изменением входного управляющего сигнала.При U=Uноми без учета внутреннего сопротивления управляемого выпрямителя двигатель работает по естественной характеристике 3. При снижении напряжения его скорость снижается и искусственные характеристики 4 будут располагаться ниже естественной. При I—» 0, М —» 0, Ф —> 0 скорость ɷ —>∞, т. е. ее ось является асимптотой характеристик двигателя.
Показатели регулирования скорости изменением напряжения ДПТПВ соответствуют показателям двигателя постоянного тока независимого возбуждения.
29 Перечислите способы торможения двигателя постоянного тока последовательного возбуждения. Изобразите схемы реализации тормозных режимов. Объясните особенности динамического торможения двигателя постоянного тока последовательного возбуждения. Изобразите характеристики динамического торможения с независимым возбуждением двигателя постоянного тока последовательного возбуждения. К46-48
Режим генераторного торможениядля ДПТ ПсВневозможен, так как ЭД в этом случае не может работать в режимехх: при I= О поток Ф ≈ 0, частота вращения неограниченно растет и двигатель идет «в разнос». Тем не менее рекуперативное торможение тяговых ЭД последовательного возбуждения применяется на электротранспорте, но в этом случае меняется схема соединений — он переключается на независимое возбуждение.
Динамическое торможение возможно по двум схемам: независимого возбуждения и по схеме самовозбуждения. При схеме независимого питания ОВ (рис. 2.12,а) для ограничения тока в этой обмотке в цепь возбуждения последовательно включаютRДОБ. Сопротивление резистора принимают таким, чтобы при торможении IОВбыл =IНОМ ЭД. Процесс торможения протекает так же, как и в ДПТ НВ. Механическая характеристика - прямолинейна, выходит из начала координат и расположена во втором квадранте.
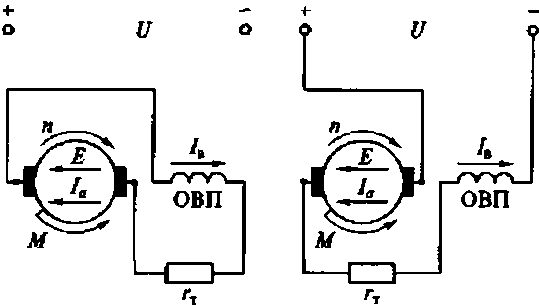
Динамическое торможение по схеме с самовозбуждением (рис. 2.12, б) предусматривает отключение от сети ОВ и подключение ее к якорю через резистор гттак, чтобы магнитный поток Ф при переходе в режим торможения не изменил своего направления, что привело бы к подавлению потока остаточ-
А б в
Рис. 2.12. ДПТ ПсВв тормозных режимах: а, б — динамическом; в — противовключением
ного магнетизма и к полному размагничиванию двигателя. В этом случае ЭДС в ОЯ не будет индуцироваться и торможения не произойдет. Мех. характеристика динамического торможения по схеме с самовозбуждением криволинейна и располагается во втором квадранте. Торможение получается малоэффективным, т.к. по мере замедления вращения уменьшается ток якоря одновременно с магнитным потоком Ф. Этот вид динамического торможения обычно применяют для аварийного торможения, например, при непредусмотренном отключении электропитания (как видно из схемы рис. 2.12, б, в процессе торможения напряжение сети не используется).
Торможение противовключением происходит так же, как и в ДПТ НВ при изменении полярности напряжения на клеммах цепи якоря, при этом меняется направление тока в ОЯ , и если направление тока в ОВ останется неизменным (рис. 2.12,в), электромагнитный момент поменяет свое направление и станет тормозящим.
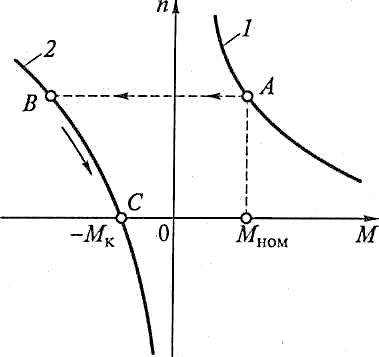
Допустим ЭД работал в режиме точки А на естественной характеристике (рис. 2.13). При переключении клемм ОЯ и введении в ее цепь резистора момент Мстановится отрицательным и процесс переходит в точку В на характеристике 2 торможения противовключением. Торможение происходит на участке ВС этой характеристики. При этом частота вращения понижается и в точке С якорь останавливается (п = 0). В этой точке двигатель следует отключить от сети, в противном случае произойдет его реверсирование.
Как и в ДПТ НВ, в ДПТ ПсВвозможен режим торможения противовключением при опускании груза, подвешенного к тросу, наматываемому на барабан. В этом случае ЭДС якорядействует согласно с напряжением сети Uс сопротивление резистора гТ, необходимого для опускания груза с заданной частотой вращения якоря двигателя в режиме противовключения, определяется выражением
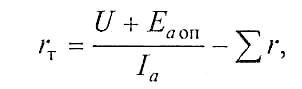 где Еаоп— ЭДС якоря в режиме торможения противовключением при опускании груза, В,
где Еаоп— ЭДС якоря в режиме торможения противовключением при опускании груза, В,

Рис. 2.13. Торможение противовключением электропривода с двигателем последовательного возбуждения
 В этом выражении Iаоп и nоп представляют собой ток нагрузки и частота вращения
В этом выражении Iаоп и nоп представляют собой ток нагрузки и частота вращения
ωхх
R1 R2
Мт1 Мт2
30 Укажите, как осуществляется реостатное регулирование скорости асинхронного двигателя с фазным ротором. Изобразите схему включения реостатов и механические характеристики при реостатном регулировании. Охарактеризуйте реостатное регулирование скорости асинхронного двигателя основными показателями. Объясните достоинство и недостатки реостатного регулирования скорости асинхронного двигателя.
В АД с фрчастоту вращения регулируют введением в цепь ротора резистора rдоб в виде регулировочного реостата РР .При полностью выведенном РР двигатель работает в режиме естественной механической характеристики (рис. 3.19, б, график приRPP = 0):
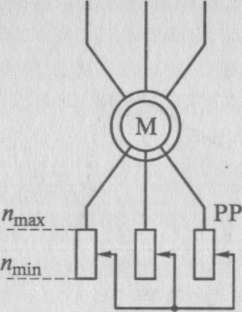 -частота вращения максимальна и при номинальной нагрузке она равном nном.
-частота вращения максимальна и при номинальной нагрузке она равном nном.
При увеличении сопротивления реостата:
-скорость хх не изменяется ω= 
- возрастает критическое скольжение SКр,
- максимальный момент Ммах, т.е.перегрузочная способность двигателя остаются неизменными
|
|
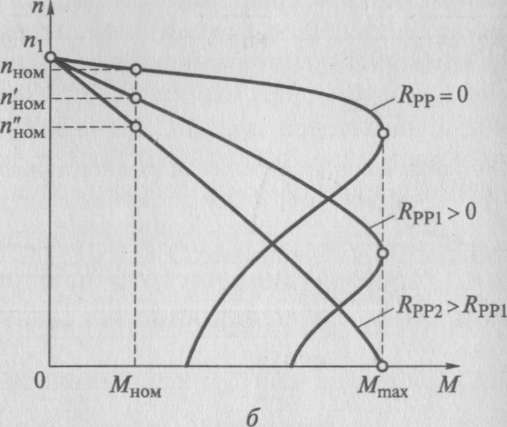
-диапазон регулирования небольшой
-изменение частоты вращения возможно только «вниз» от синхронной.
-механические характеристики становятся более мягкими.
-при увеличении сопротивления РР возрастают потери в цепи ротора, при этом КПД и полезная мощность двигателя уменьшаются.
-С увеличением числа ступеней РР повышается плавность регулирования, но при этом возрастает стоимость коммутирующих устройств.
Достоинства:-максимальный момент Ммах, т.е.перегрузочная способность двигателя остаются неизменными
-простота реализации
Недостатки:диапазон регулирования небольшой
-изменение частоты вращения возможно только «вниз» от синхронной.
-механические характеристики становятся более мягкими.
-при увеличении сопротивления РР возрастают потери в цепи ротора, при этом КПД и полезная мощность двигателя уменьшаются.
:
31 Перечислите способы изменения напряжения питания асинхронного двигателя для регулирования его скорости. Изобразите механические характеристики асинхронного двигателя при регулировании напряжения питания. Объясните вид механических характеристик асинхронного двигателя при регулировании напряжения питания. Охарактеризуйте регулирование скорости асинхронного двигателя с помощью напряжения питания основными показателями и укажите достоинства и недостатки.
Изменять напряжение питания АД:
-посредством регулировочного автотрансформатораAT, включенного в линейные провода между сетью и обмоткой статора (рис. а).
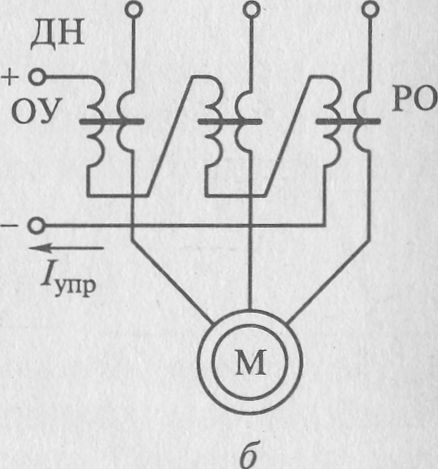
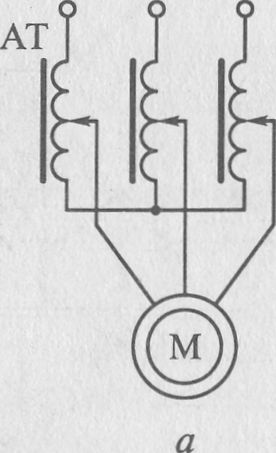 -трехфазным дросселем насыщения ДН (рис. б). Рабочие обмотки дросселя РО создают в цепи питания двигателя индуктивное сопротивление.
-трехфазным дросселем насыщения ДН (рис. б). Рабочие обмотки дросселя РО создают в цепи питания двигателя индуктивное сопротивление.
--тиристорнымрегулятором напряжения ТРН.Изменять подводимое напряжение можно только внизот номинального, напряжение свыше номинального недопустимо.
При изменении подводимого к обмотке статора напряжения U1моментМтах меняется пропорционально квадрату этого напряжения, а критическое скольжение остается неизменным, так как его величина не зависит от напряжения . Скорость хх не меняется ω=
Показатели:
-диапазонрегулирования узкий,
-.При уменьшении напряжения частота вращения роторап при неизменном нагрузочном моменте Мсуменьшается.
- искусственные характеристики , оказываются малопригодными для регулирования скорости, так как по мере уменьшения напряжения резко снижаются критический момент АД и тем самым его перегрузочнаяспособность,
-возрастают электрические потери в обмотке ротора, величина которых пропорциональна скольжениюs:Рэ2 = sPэм
где Рэм— электромагнитная мощность двигателя.
Это ведет к значительному снижению КПД двигателя, особенно при низких частотах вращения. Например, при уменьшении частоты вращения в два раза (s = 0,5) половина электромагнитноймощности двигателя затрачивается на покрытие электрических потерь в роторе. А если учесть потери в статоре, то КПД двигателя уменьшается более чем в два раза.
Разомкнутая схема, используется лишь для обеспечения заданного ускорения движения ЭП или регулирования натяжения на исполнительном органе рабочей машины.
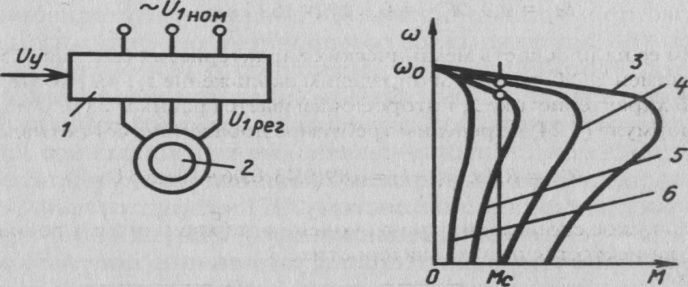
32 Запишите основной закон частотного регулирования скорости асинхронного двигателя. Изобразите механические характеристики асинхронного двигателя при частотном регулировании скорости. Объясните характер изменения момента асинхронного двигателя при регулировании скорости вверх и вниз от номинальной частотным способом. Дайте краткий сравнительный анализ устройств для частотного регулирования скорости асинхронного двигателя.
Чтобы сохранить перегрузочную способность двигателя, необходимо одновременно с изменением частоты тока f1 менять напряжение U1подводимое к обмотке статора.
Если статический моментпостоянныйМс= constнапряжение на статоре должно регулироваться пропорционально его частотеU1 /f1= const-закон Костенко
Необходимым элементом ЭП является преобразователь частоты и напряжения 1, на вход которого подается стандартное напряжение сети промышленной частоты, а с выхода снимается переменное напряжение регулируемой частоты (см. рис. 5.14, а).
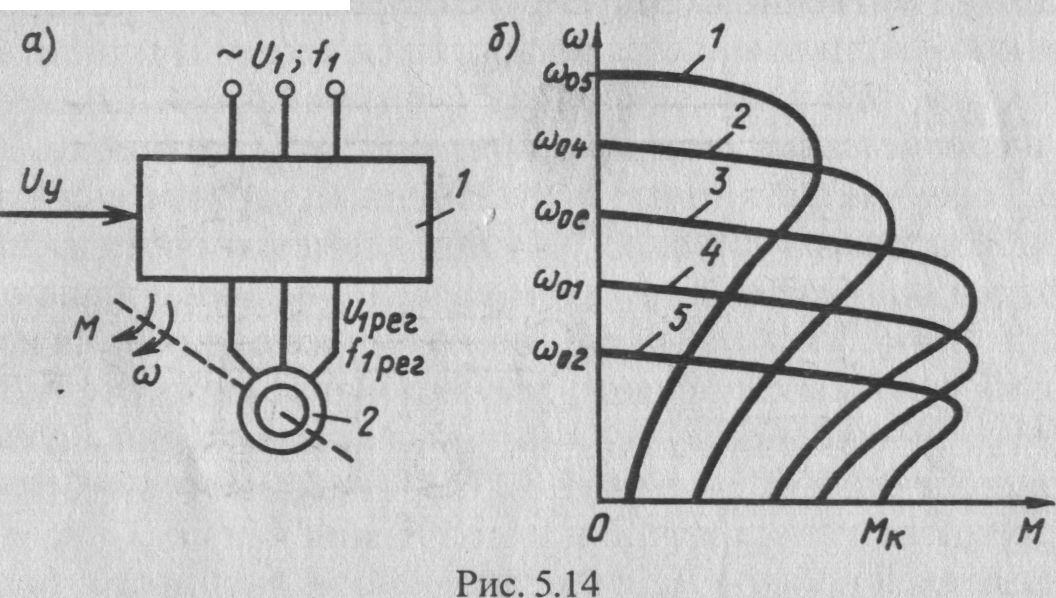
Анализ механических характеристик при управлении по закону U/f = constпоказывает, что скорость идеального холостого хода двигателя ω=  изменяется пропорционально частоте напряжения, а критический момент Мкростается неизменным.
изменяется пропорционально частоте напряжения, а критический момент Мкростается неизменным.
Область частот ft<flHOM.В этой области выполняется соотношениеU/f= const, так как напряжение, подводимое к АД, регулируется от сетевого в сторону уменьшения. Поэтому Мкр= constи АД имеет постоянную перегрузочную способность.
Область частот f>f1ном. По условиям нормальной работы АД нельзя повышать напряжение сверх номинального (паспортного). Поэтому регулирование скорости в этой области ведется при U1 = U1H0M = const(характеристики 1и2при частотахf11 иf12), т.е. критический момент Мк будет уменьшаться при увеличении частоты.
СхемаПЧ без звена постоянного тока с непосредственной связью питающей сети и нагрузки может обеспечивать регулирование частоты и напряжение Uна статоре АД только в сторону уменьшения по сравнению с сетевой,следовательно скорость – только вниз от номинальной.
ПЧ со звеном постоянного тока обеспечивают плавное регулирование частоты напряжения на статоре АД как ниже, так и выше сетевой,.в широком диапазоне, т. е. АД может иметь скорость как больше, так и меньше номинальной. При этом регулировочные характеристики имеют высокую жесткость, а АД сохраняет большую перегрузочную способность.Диапазон регулирования скорости в разомкнутых системах составляет 5... 10, а в замкнутых системах может достигать 1000 и более
33 Укажите условия применения торможения противовключением асинхронного двигателя. Изобразите схему и механические характеристики асинхронного двигателя в режиме торможения противовключением. Объясните способы перевода асинхронного двигателя в режим торможения противовключением. Охарактеризуйте влияние добавочных сопротивлений на процесс торможения противовключением асинхронного двигателя и покажите на характеристиках.
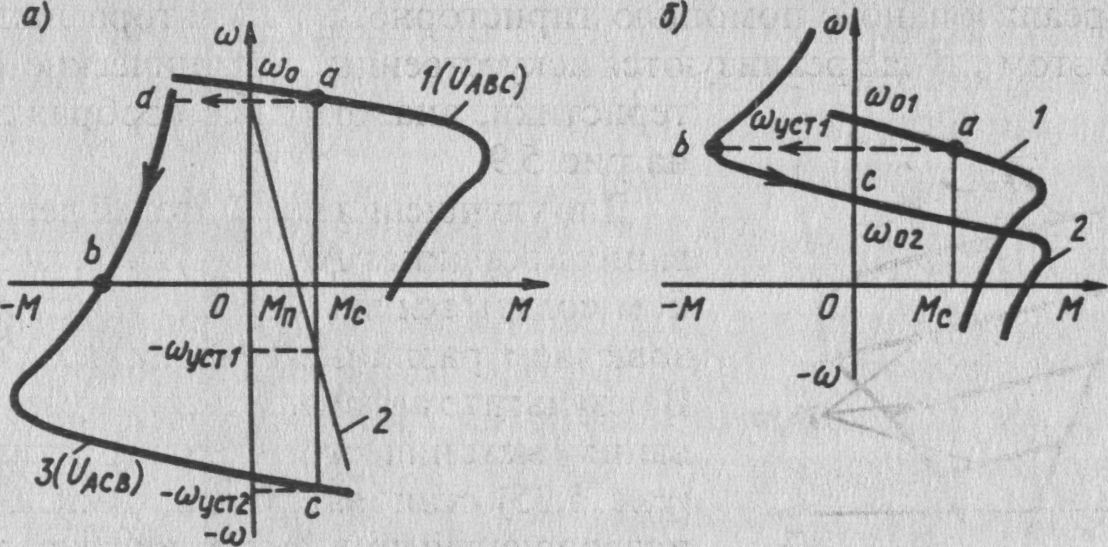
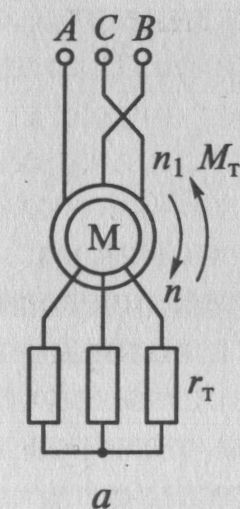 Торможение противовключениемпозволяет получать большие тормозные моменты, поэтому его применяют при необходимости быстрой остановки электропривода.
Торможение противовключениемпозволяет получать большие тормозные моменты, поэтому его применяют при необходимости быстрой остановки электропривода.
Осуществляется двумя путями. Для этого режима достаточно у работающего АД изменить направление вращения поля статора путем переключения двух проводов, присоединяющих к сети обмотку статора. Например, прямой порядок следования фаз ABCзаменить обратным порядком следования АСВ.
Отметим, что при реализации торможения для ограничения тока и момента АД производится включение добавочных резисторов в цепь ротора или статора.
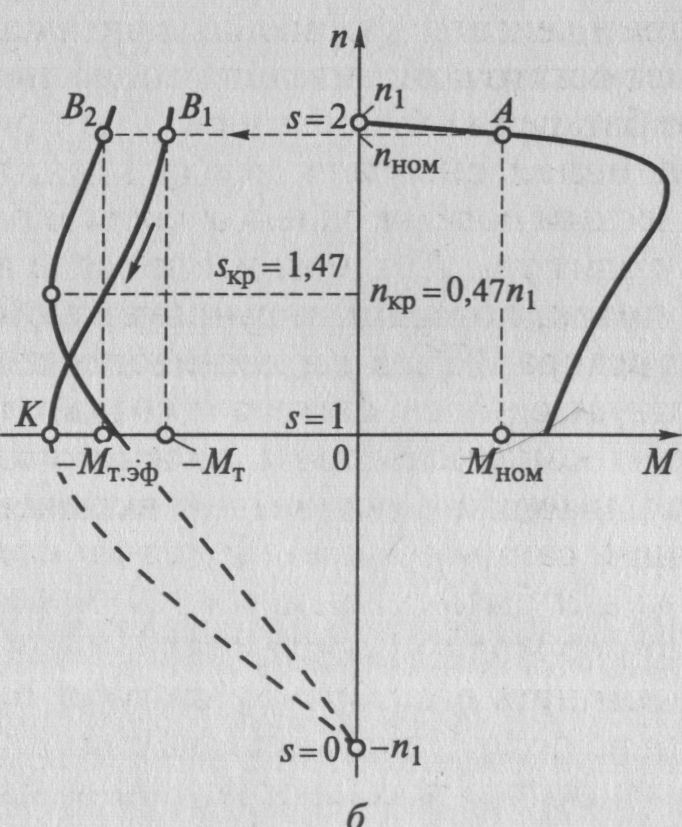 Другой путь перевода АД в режим торможения противовключением реализован при активном характере момента нагрузки Мс. Допустим, что требуется осуществить спуск груза, обеспечивая его торможение с помощью АД (так называемый тормозной спуск груза). Для этого АД включается на подъем с большим добавочным сопротивлением R2д в цепи ротора (кривая 2). Вследствие превышения моментом нагрузки Мс пускового момента двигателя Mгруз начнет опускаться. АД при этом будет работать в режиме торможения противовключением.При п = 0 (точка К) двигатель необходимо отключить от сети, иначе произойдет его реверсирование.
Другой путь перевода АД в режим торможения противовключением реализован при активном характере момента нагрузки Мс. Допустим, что требуется осуществить спуск груза, обеспечивая его торможение с помощью АД (так называемый тормозной спуск груза). Для этого АД включается на подъем с большим добавочным сопротивлением R2д в цепи ротора (кривая 2). Вследствие превышения моментом нагрузки Мс пускового момента двигателя Mгруз начнет опускаться. АД при этом будет работать в режиме торможения противовключением.При п = 0 (точка К) двигатель необходимо отключить от сети, иначе произойдет его реверсирование.
34* Перечислите разновидности динамического торможения асинхронного двигателя. Укажите отличия динамического торможения асинхронного двигателя с фазным ротором и асинхронного двигателя с короткозамкнутым ротором. Опишите особенности динамического торможения с самовозбуждением асинхронного двигателя с короткозамкнутым ротором. Изобразите механические характеристики асинхронного двигателя в режиме динамического торможения и объясните влияние конденсаторов на работу асинхронного двигателя в двигательном режиме.
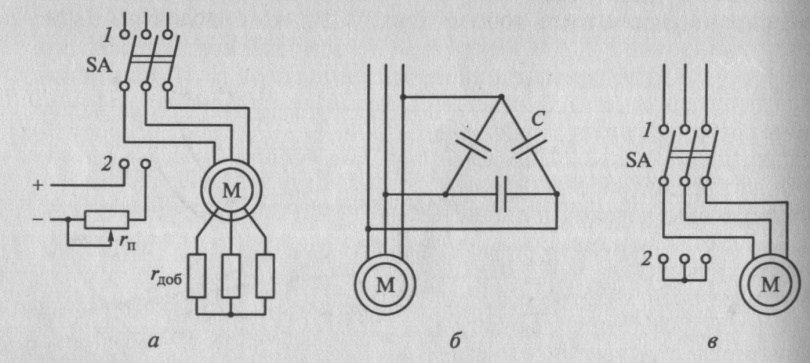 Для динамического торможения обмотку статора АД отключают от сети переменного тока и подключают к источнику постоянного тока.
Для динамического торможения обмотку статора АД отключают от сети переменного тока и подключают к источнику постоянного тока.
Постоянный ток Iп, значение которого может регулироваться резистором 2, протекает по обмоткам статора и создает неподвижноев пространстве магнитное поле. При
Рис. 3.8. Схемы АД при динамическомторможении:
а— постоянным током; б— конденсаторное;
вращении ротора в нем наводится ЭДС, под действием которой в обмотке протекает ток, создающий магнитный поток. Взаимодействие тока ротора с результирующим магнитным полем АД создает тормозной момент.
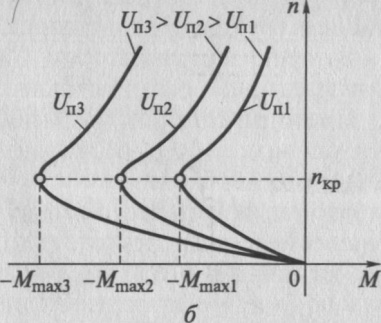
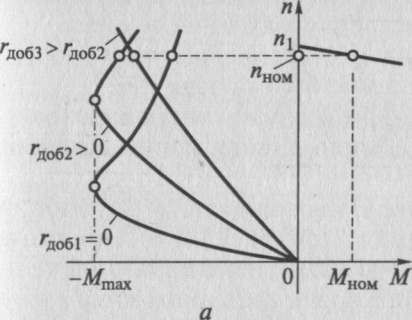 Динамическое торм.АД с фазным ротором: В АД с фрдля плавности торможения в цепь ротора вводят резистор гдобпеременного сопротивления. В начале торможения следует установитьнаибольшее значение сопротивления, а затем постепенно уменьшать его.
Динамическое торм.АД с фазным ротором: В АД с фрдля плавности торможения в цепь ротора вводят резистор гдобпеременного сопротивления. В начале торможения следует установитьнаибольшее значение сопротивления, а затем постепенно уменьшать его.
Рис. 3.9. Механические характеристики в режиме динамического торможения:
а –АД с фр; б — дв. с кз ротором
При этом максимум М т будет смещаться в сторону меньшей скорости.
При динамическомторможении АД с кз ротором (3.9, б) эффективность торможения повышают увеличением напряжения постоянного тока Un, подводимого к обмотке статора. Напряжение постоянного тока, подводимое к обмотке статора должно быть ниже напряжения переменного тока, соответствующего работе двигателя, так, чтобы ток в обмотке статора не превышал номинального значения.
Дин.торможение при самовозбуждении (конденсаторное) торможениеосновано на том, что после отключения АД от сети его электромагнитное поле затухает не мгновенно. За счет энергии этого затухающего поля можно обеспечить самовозбуждение АД и реализовать тормозной режим.
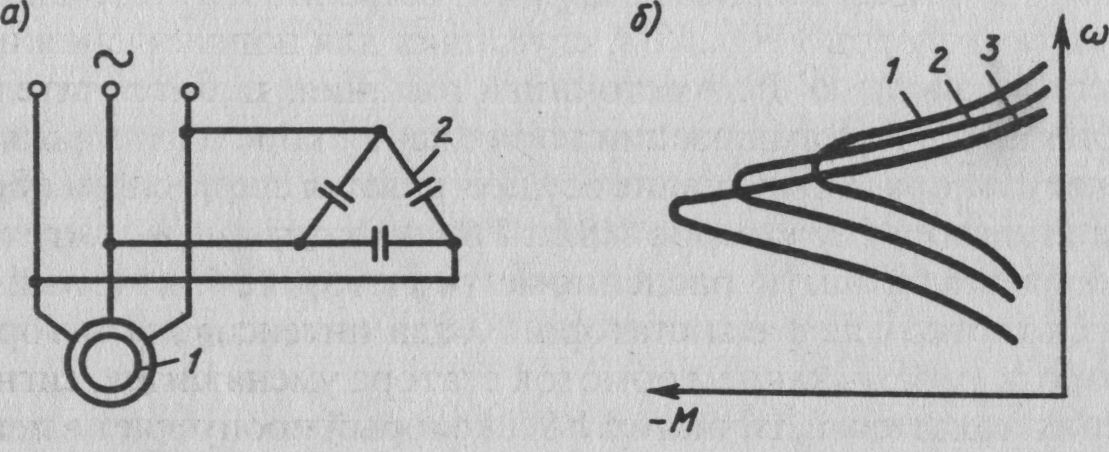 Конденсаторы могут подключаться к статору постоянно (глухое подключение) или с помощью дополнительного контактора, по схеме треугольника или звезды.Интенсивностьзависит от емкости конденсаторов (1 ...3 соответствуют значениям С1, <С2<С3). Чем С больше, тем больше будет максимум торм. момента.Недостаток: срыв торм. Момента на скорости 30% ω ном.
Конденсаторы могут подключаться к статору постоянно (глухое подключение) или с помощью дополнительного контактора, по схеме треугольника или звезды.Интенсивностьзависит от емкости конденсаторов (1 ...3 соответствуют значениям С1, <С2<С3). Чем С больше, тем больше будет максимум торм. момента.Недостаток: срыв торм. Момента на скорости 30% ω ном.
Вкл-е конд. батареи снижает потребление реакт. мощности, т.к. увелич. емкостную составляющую и увелич. коэф. мощности  .
.
34 Перечислите разновидности режимов торможения асинхронного двигателя. Укажите отличия динамического торможения с независимым возбуждением асинхронного двигателя от конденсаторного. Опишите особенности динамического торможения с самовозбуждением асинхронного двигателя. Изобразите механические характеристики асинхронного двигателя в режиме конденсаторного торможения и объясните влияние конденсаторов на работу асинхронного двигателя в двигательном режиме.
Генераторное, динамическое, противовключением.
Для динамического торможенияс независимым возбуждениемобмотку статора АД отключают от сети переменного тока и подключают к источнику постоянного тока.
Постоянный ток Iп, значение которого может регулироваться резистором 2, протекает по обмоткам статора и создает неподвижноев пространстве магнитное поле.
Рис. 3.8. Схемы АД при динамическомторможении:
а— постоянным током; б— конденсаторное;
При вращении ротора в нем наводится ЭДС, под действием которой в обмотке протекает ток, создающий магнитный поток. Взаимодействие тока ротора с результирующим магнитным полем АД создает тормозной момент.
Дин.торможение при самовозбуждении (конденсаторное) торможение основано на том, что после отключения АД от сети его электромагнитное поле затухает не мгновенно. За счет энергии этого затухающего поля можно обеспечить самовозбуждение АД и реализовать тормозной режим.
Конденсаторы могут подключаться к статору постоянно (глухое подключение) или с помощью дополнительного контактора, по схеме треугольника или звезды. Интенсивностьзависит от емкости конденсаторов (1 ...3 соответствуют значениям С1, <С2<С3). Чем С больше, тем больше будет максимум торм. момента.Недостаток: срыв торм. Момента на скорости 30% ω ном.
Вкл-е конд. батареи снижает потребление реакт. мощности, т.к. увелич. емкостную составляющую и увелич. коэф. мощности .
35 Дайте определение понятию «режим работы электропривода». Перечислите основные режимы работы электропривода (S1,S2,S3). Поясните особенности режимов работы электропривода. Изобразите нагрузочные диаграммы режимов работы. К146-148
Режим работы электропривода (двигателя) — это установленный порядок чередования периодов, характеризуемых величиной и продолжительностью нагрузки, отключений, торможения, пуска и реверса во время его работы. Режимы работы рабочих машин определяются технологическими процессами. Для иллюстрации этих режимов работы используют нагрузочные диаграммы. Это зависимость параметра, характеризующего нагрузку приводного двигателя (полезной мощности Р, момента М,силы потребляемого тока I) от продолжительности tотдельных циклов, составляющих работу ЭП в течение определенного периода времени.
Согласно действующему стандарту, существует три основных режима работы двигателей, различающиеся характером изменения нагрузки:
1.Продолжительный режим S1 — когда при неизменной нагрузке Рномработа двигателя продолжается так долго, что температура перегрева его частей успевает достигнуть установившихся значений τуст. Различают продолжительные режимы с неизменной нагрузкой Р=соnst (рис. 5.2, а) и с изменяющейся нагрузкой (рис. 5.2, б).Например, электроприводы насосов, транспортеров, вентиляторов работают в продолжительном режиме с неизменной нагрузкой, а ЭП металлорежущих станков и т. п. работают в продолжительном режиме с изменяющейся нагрузкой.
2.Кратковременный режим S2 —периоды работы ЭД с неизменной нагрузкой чередуются с периодами отключения (рис. 5.2, в).При этом периоды нагрузки настолько кратковременные, что температуры нагрева всех частей ЭД не достигает установившихся значений, а периоды отключения настолько продолжительны, что все части ЭД успевают охладиться до температуры окр. среды (допускается превышение температуры не более чем на 1 °С). Стандартом установлена длительность периодов нагрузки 10; 30; 60 и 90 мин. В условном обозначении кратковременного режима указывается продолжительность периода нагрузки, например S2 — 30 мин. В кр. режиме работают ЭП шлюзов, разного рода заслонок, вентилей и других запорных устройств, регулирующих подачу рабочего вещества (нефть, газ и др.) посредством трубопровода к объекту.
3.Повторно-кратковременный режим S3 — когда кратковременные периоды работы чередуются с периодами отключения (паузами) , причем за период нагрузки превышение температуры всех частей ЭД не успевает достигнуть установившихся значений, а за время паузы части ЭД не успевают охладиться до температуры окр. среды. Общее время работы в ПВ режиме разделяется на периодически повторяющиеся циклы продолжительностью tц = tр + tп.
При ПВ режиме график нагревания двигателя имеет вид пилообразной кривой (рис. 5.2, г). Примерами ПВ реж.: Лифты, подъёмные краны, экскаваторы.
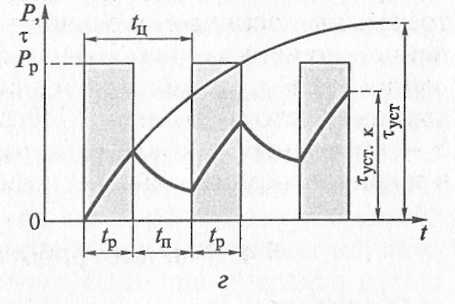
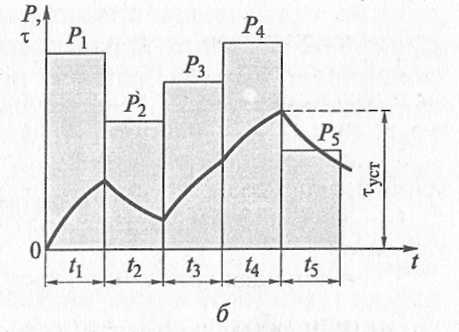
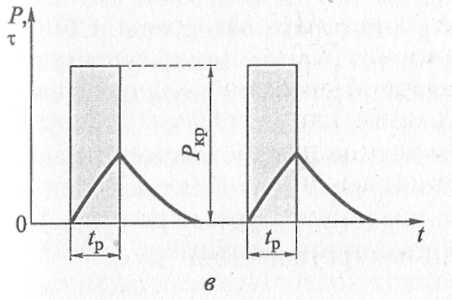
36* Перечислите, в каких режимах электропривода возможно снижение потерь электроэнергии. Укажите, за счет чего снижаются потери энергии в переходных процессах. Объясните, как достигается энергосберегающий эффект при торможении. Обоснуйте, как предусматривается энергосберегающий эффект электропривода на стадии проектирования. К363-366
Снижение потерь электроэнергии возможно при пуске, торможении, установившихся режимах.
Потери энергии в переходных режимах могут быть заметно снижены за счет применения ЭД с меньшими значениями моментов инерции ротора, что достигается уменьшением диаметра ротора при одновременном увеличении его длины, так как мощность двигателя при этом должна оставаться неизменной. Например, так сделано вЭДкраново-металлургических серий, предназначенных для работы в ПВ режиме с большим числом включений в час.
Эффективным средством снижения потерь энергии при пуске двигателей является пуск при постепенном повышении напряжения, подводимого к обмотке статора. Такой энергосберегающий способ пуска двигателя возможен только при работе ЭД в системе с регулируемым преобразователем: для АД это устройства плавного пуска или преобразователи частоты, а для ДПТ это электронные (тиристорные) устройства управления.
Энергия, расходуемая при торможении двигателя, равна кинетической энергии, запасенной в движущихся частях электропривода при его пуске. Энергосберегающийэффела:_при торможении зависит от способа торможения. Наибольший энергосберегающий эффект происходит при генераторном рекуперативном торможении с отдачей энергии в сеть.При динамическом торможении двигатель отключается от сети, поэтому потери энергии при динамическом торможении не происходит. Наибольшие потери энергии происходят при торможении противовключением, когда расход электроэнергии ранен трехкратному значению энергии, рассеиваемой в двигателе при динамическом торможении.
При установившемся режиме работы двигателя с номинальной нагрузкой потери энергии определяются номинальным значением КПД. Но если ЭП работает с переменной нагрузкой, то в периоды ее спада КПД ЭД понижается, что ведет к росту потерь. Эффективным средством энергосбережения в этом случае является снижение напряжения, подводимого к двигателю в периоды его работы с недогрузкой. Это возможно реализовать при работе двигателя в системе с регулируемым преобразователем.
При проектировании ЭПважным является правильный выбор мощности ЭД. Так, выбор завышенной мощности приведет к снижению технико-экономических показателей (КПД и коэффициент мощности), вызванных недогрузкой такого ЭД, и к росту эксплуатационных расходов электропривода, так как с уменьшением КПД и коэффициента мощности возрастает непроизводительный расход электроэнергии. Такое решение ведет также к росту капитальных затрат (стоимость ЭД с увеличением его номинальной мощности возрастает).
Применение двигателей заниженной мощности вызывает их перегрузку в процессе эксплуатации. Вследствие этого повышается температура перегрева обмоток, что способствует росту потерь и вызывает сокращение срока службы двигателя, возникают аварии и непредвиденные остановки, и растут эксплуатационные расходы.Особенно это относится к ДПТ из-за наличия у них щеточно-коллекторного узла, наиболее чувствительного к перегрузкам.
Большое значение имеет рациональный выбор пускорегулирующей аппаратуры. Содной стороны, желательно, чтобы процессы пуска, торможения, реверса и регулирования частоты вращения не сопровождались значительными потерями электроэнергии, так как это ведет к удорожанию эксплуатации ЭП. Но, с другой стороны, желательно, чтобы стоимость пускорегулирующих устройств не была высокой, что привело бы к росту капитальных затрат. Обычно эти требования находятся в противоречии. Например, (применение полупроводниковых пусковых, и регулирующих устройств обеспечивает наиболее экономичное протекание переходных процессов в двигателях, но стоимость этих устройств пока еще остается достаточно высокой. Поэтому если ЭП не подвержен частым регулировкам, пускам, реверсам и т.п., то повышенные затраты на дорогостоящее пускорегулирующее оборудование могут оказаться неоправданными, а расходы, связанные с потерями энергии — незначительными. И при интенсивной эксплуатации ЭП в переходных режимах применение полупроводниковых пускорегулирующих устройств становится оправданным.
Известно, что электрические потери в питающих сетях и в обмотках электрических устройств пропорциональны квадрату тока (РЭл = I2R).По этой причине целесообразно применение ЭД с большим номинальным напряжением, так как при заданной мощности применение более высокого напряжения сопровождается уменьшением силы тока, и следовательно, сокращением потерь.
36 Перечислите разновидности режимов торможения асинхронного двигателя. Укажите условия создания режима динамического торможения с независимым возбуждением асинхронного двигателя.Изобразите упрощённую схему динамического торможения с независимым возбуждением и механические характеристики. Объясните, как повышают эффективность динамического торможения с независимым возбуждением асинхронного двигателя.
Генераторное, динамическое, противовключением.
Для динамического торможенияс независимым возбуждениемобмотку статора АД отключают от сети переменного тока и подключают к источнику постоянного тока.
Постоянный ток Iп, значение которого может регулироваться резистором 2, протекает по обмоткам статора и создает неподвижноев пространстве магнитное поле.
Рис. 3.8. Схемы АД при динамическомторможении:
а— постоянным током; б— конденсаторное;
При вращении ротора в нем наводится ЭДС, под действием которой в обмотке протекает ток, создающий магнитный поток. Взаимодействие тока ротора с результирующим магнитным полем АД создает тормозной момент.
При динамическомторможении АД с кз ротором (3.9, б) эффективность торможения повышают увеличением напряжения постоянного тока Un, подводимого к обмотке статора. Напряжение постоянного тока, подводимое к обмотке статора должно бытьниженапряжения переменного тока, соответствующего работе двигателя, так, чтобы ток в обмотке статора не превышал номинального значения.
Дата добавления: 2018-04-05; просмотров: 1306; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!