Порядок выполнения лабораторной работы
1. Изучить конструкцию и технические характеристики промышленного робота ЦПР – 1П.
2. Изучить методику подготовки робота к работе.
3. Произвести регулировку робота.
Контрольные вопросы
1. Какое назначение промышленного робота ЦПР-1П и какие его основные технические характеристики?
2. Какие основные механизмы робота?
3. Как работает механизм подъема (поворота или горизонтальных перемещений)?
4. Как работает пневматическая система робота?
5. Какая система управления и что обеспечивает управление роботом?
6. Как осуществляется подготовка робота к работе и его регулировка?
Лабораторная работа № 4
Микроконтроллер программируемый МКП-1
Цель: изучение технических характеристик микроконтроллера программируемого МКП-1, его устройства, системы команд управления, рекомендаций по программированию и приобретение практических навыков по разработке управляющих программ для промышленного робота ЦПР-1П.
Микроконтроллер программируемый МКП-1 (в дальнейшем микро-контроллер) предназначен для циклового двухпозиционного управления манипулятором промышленного робота и технологическим оборудованием.
Областью наиболее эффективного применения микроконтроллера является управление роботизированными технологическими комплексами и автоматическими линиями при автоматизации технологических процессов в условиях серийного и мелкосерийного производства, когда требуется развитое программно-логическое управление, оперативная смена управляющих программ, и использование стандартных средств вычислительной техники экономически нецелесообразно ввиду их высокой стоимости и сложности обслуживания.
|
|
|
Технические характеристики
1. Тип управления:
· цикловой (по временному, путевому или совмещенному принципам);
· программно-логический.
2. Программируемые функции:
· управление выходами на исполнительные устройства;
· прием информации, поступающей от датчиков состояния обору-дования;
· формирование выдержки времени;
· организация условных и безусловных переходов по программе;
· связь с управляющим комплексом высшего ранга по интерфейсу последовательной передачи информации.
3. Сервисные функции:
· редактирование программ;
· тестовый контроль модулей;
· контроль рабочих программ.
4. Режимы работы:
· автоматическое управление (по управляющей программе, записанной в память);
· ручное управление (управление по командам, поданным с пульта управления);
· пошаговое выполнение программы;
· просмотр программы (вывод на дисплей содержимого памяти рабочих программ).
5. Ввод и отладка программ, управление режимами работы с клавиатуры пульта управления
|
|
|
6. Дискретность задания выдержки времени, с 0,1
7. Нароботка на отказ не менее, ч 5000
8. Питание от сеть переменного тока напряжением, В 220
9. Потребляемая мощность не более, Вт 60
10. Габаритные размеры, мм, не более длина х ширина х высота 440х275х170
11. Масса не более, кг 50
Устройство микроконтроллера
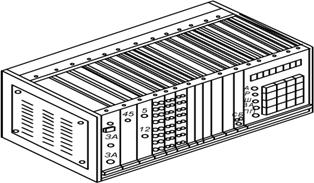
Основными узлами микроконтроллера (рис. 1) являются:
· корпус;
· пульт управления;
· функциональные модули;
· модули источника питания;
· сетевой фильтр.
На передней панели микроконтроллера расположены все необходимые органы управления и индикации:
· выключатель «СЕТЬ»;
· индикатор напряжения питания сети и предохранители;
· индикаторы наличия напряжения вторичных стабилизированных источников питания +5, +12, -5 В и энергонезависимого питания для модуля энергонезависимого запоминающего устройства (МЭНЗУ);
|
|
|
| 
|
| а | б |
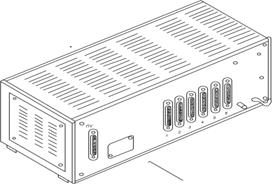
Рис. 1. Микроконтроллер МКП-1:
а – лицевая сторона, б – обратная сторона
· индикаторы входов и выходов микроконтроллера;
· индикатор «ОЖ», включенное состояние которого сигнализирует оператору о том, что микроконтроллер находится в режиме ожидания ввода информации с клавиатуры пульта управления;
· пульт управления.
На задней панели закреплен сетевой фильтр и шесть розеток соединителей типа РП15-32 (00–0F, 10–1F, 20–2F), предназначенные для подключения внешнего оборудования и датчиков.
В составе микроконтроллера можно выделить:
· модуль процессора (МПР);
· систему памяти;
· систему ввода-вывода, обеспечивающую с помощью соответ-ствующих модулей связь МПР с пультом управления, управляющей ЭВМ высшего ранга и внешним технологическим оборудованием;
· систему электропитания.
Модуль процессора выполнен на БИС КР580ИР80, осуществляет сбор, цифровую обработку и вывод информации в соответствии с исполнительной программой, записанной в перепрограммируемое постоянное запоминающее устройство (ПЗУ) модуля памяти (МП).
Исполнительная программа является неотъемлемой частью микро-контроллера, недоступной для пользователя. Ее назначение – преобразование инструкций, введенных оператором с пульта управления (ПУ) или посту-пающих от управляющей программы, в последовательность кодов машинного языка микроконтроллера, реализующих эти инструкции.
|
|
|
Управляющая программа (УП) – программа, написанная пользователем в кодах входного языка микроконтроллера и обеспечивающая выполнение заданного алгоритма управления внешним оборудованием. Она размещается вмодулях энергонезависимого запоминающего устройства и сохраняется при отключении первичного питания микроконтроллера благодаря использованию автономного электропитания.
Пульт управления (ПУ) (рис.8) совместно с модулем управления (МУ) составляет технические средства общения оператора с микроконтроллером. ПУ включает в себя клавиатуру для ввода команд и управления режимом работы микроконтроллера, 8-разрядный однострочный дисплей и индикаторы режимов работы.
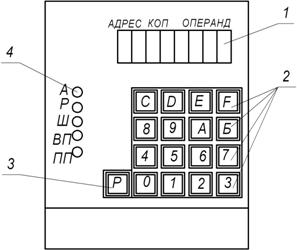
Рис.8. Пульт управления:
1- дисплей; 2 – клавиатура; 3 – индикаторы режимов работы; 4 – клавиша режимов работы
Модуль ввода (МВВ) и вывода (МВЫВ) дискретных сигналов пред-назначен для связи микроконтроллера с внешним технологическим оборудованием (исполнительными устройствами, датчиками состояния оборудования, реле и т.п.).
Модуль последовательного интерфейса (МПИ) предназначен для обмена информацией между микроконтроллером и ЭВМ высшего ранга в автоматической системе управления технологическим процессом.
Система электропитания микроконтроллера преобразует первичное напряжение питающей сети во вторичное стабилизированное напряжение, необходимое для питания его модулей.
Режимы работы
В каждый текущий момент микроконтроллер может находиться в одном из пяти режимов работы:
· автоматическом,
· ручном,
· пошаговом,
· ввода программы,
· просмотра программ, отображаемых на ПУ светодиодами А, Р, Ш, ВП, ПП.
Режим“Ввод программы” используется для записи кодов команд управляющей программы в энергонезависимое запоминающее устройство (ЭНЗУ). Необходимая команда набирается оператором на клавиатуре ПУ. Процессор под управлением исполнительной программы считывает коды нажатых клавиш, формирует из них код команды и пересылает его в ЭНЗУ по адресу, определяемому счетчиком команд, который размещен в оперативном запоминающем устройстве (ОЗУ) МП. По окончании пересылки каждой команды содержимое счетчика команд увеличивается на единицу. Вводимая информация совместно с текущим значением счетчика команд отображается на дисплее.
Структура режима“Просмотр программы” аналогична режиму “Ввод программы”, однако направление прохождения информации противоположно. В соответствии с адресом ячейки ЭНЗУ, записанной в счетчике команд, процессор производит считывание содержащейся в этой ячейке информации и выводит ее на дисплей совместно с текущими значениями счетчика команд. Содержимое счетчика команд модифицируется и процессор переходит в режим ожидания нажатия клавиши, воспринимаемого им как команда вывода на дисплей содержимого очередной ячейки ЭНЗУ.
В режиме управления “Ручной” процессор взаимодействует с ПУ аналогично режиму “Ввод программы”, однако сформированный код команды не записывается в ЭНЗУ, а выполняется.
“Автоматический” режим работы является основным и предназначен для управления технологическим оборудованием в соответствии с управляющей программой, записанной в ЭНЗУ. В этом режиме клавиатура для ввода кодов команд заблокирована.
“Пошаговый” режим используется при отладке УП, в котором процессор осуществляет выборку из ОЗУ и выполнение очередной команды, после чего изменяет содержимое счетчика команд и переходит в режим ожидания ввода с клавиатуры. Каждое нажатие клавиши иницирует процессор на выполнение очередного шага программы. В паузах между выполнением команд процессор выводит на дисплей адрес и содержимое ячейки ЭНЗУ, хранящей команду, которая будет выполняться на следующем шаге.
Дата добавления: 2018-04-05; просмотров: 450; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!