Лабораторная работа №2 Квантование и дискретизация
2.1 Цель работы:
Исследование методов квантования сигналов. Моделирование ADC
2.2 Предварительное задание. Изучить методы квантования сигналов. Моделирование ADC
В любую систему информация поступает в виде сигналов. Различные параметры физических процессов с помощью датчиков обычно преобразуются в электрические сигналы. Как правило, ими являются непрерывно изменяющиеся ток или напряжение, но возможно поступление и импульсных сигналов, как, например, в радиолокации. Печатный текст отображается буквами, цифрами и другими знаками.
 Хотя поступающую информацию можно хранить, передавать и обрабатывать как в виде непрерывных, так и в виде дискретных сигналов, на современном этапе развития информационной техники предпочтение отдается дискретным сигналам, поэтому сигналы, как правило, преобразуются в дискретные. С этой целью каждый непрерывный сигнал подвергается операциям квантования по времени (дискретизации) и по уровню.
Хотя поступающую информацию можно хранить, передавать и обрабатывать как в виде непрерывных, так и в виде дискретных сигналов, на современном этапе развития информационной техники предпочтение отдается дискретным сигналам, поэтому сигналы, как правило, преобразуются в дискретные. С этой целью каждый непрерывный сигнал подвергается операциям квантования по времени (дискретизации) и по уровню.
Под дискретизацией подразумевают преобразование функции непрерывного времени в функцию дискретного времени, представляемую совокупностью величин, называемых координатами, по значениям которых исходная непрерывная функция может быть восстановлена с заданной точностью. Роль координат часто выполняют мгновенные значения функции, отсчитанные в определенные моменты времени.
Под квантованием подразумевают преобразование некоторой величины с непрерывной шкалой значений в величину, имеющую дискретную шкалу значений. Оно сводится к замене любого мгновенного значения одним из конечного множества разрешенных значений, называемых уровнями квантования.
|
|
|
Изменение вида сигнала u(t) (рис. 2.1, а) в результате проведения операции дискретизации показано на рис. 2.1,б, а в результате совместного проведения операций дискретизации и квантования – на рис. 2.1, в.
Число уровней квантования на рис. 2.1, в равно 8. Обычно их значительно больше. Передача такого множества различных по уровню импульсов даже на небольшие расстояния применяется крайне редко. Если провести нумерацию уровней, то их передача сведется к передаче чисел. Тогда, выразив эти числа в какой-либо системе счисления, можно обойтись меньшим множеством передаваемых сигналов. Как правило, дискретный сигнал преобразуется в последовательность чисел, выраженных в двоичном коде. Каждое дискретное значение сигнала представляется в этом случае последовательностью сигналов двух уровней. Наличие или отсутствие импульса на определенном месте интерпретируется единицей или нулем в соответствующем разряде двоичного числа.
Цифровая форма представления сигнала u(t) (рис. 2.1, а) показана на рис. 2.1, г. Для восьми уровней достаточно трех двоичных разрядов. Импульсы старших разрядов расположены крайними справа.
|
|
|
При передаче и обработке информации в цифровой технике существует принципиальная возможность снижения вероятности получения ошибочного результата до весьма малых значений. Она возникает потому, что при использовании дискретных сигналов, во-первых, применимы такие методы кодирования, которые обеспечивают обнаружение и исправление ошибок, а во-вторых, можно избежать свойственного аналоговым сигналам эффекта накопления искажений в процессе их передачи и обработки, поскольку квантованный сигнал легко восстановить до первоначального уровня всякий раз, когда величина накопленных искажений приблизится к половине кванта. Практическая реализация указанных методов наиболее эффективна при минимальном числе уровней, равном двум.
Дискретизация по частотному критерию. Правило выбора предельного шага при равномерной дискретизации с использованием модели сигнала с ограниченным спектром в наиболее четкой форме сформулировано и доказано акад. В. А. Котельниковым в виде теоремы, получившей в отечественной литературе его имя*.
|
|
|
* В зарубежной литературе эту теорему называют теоремой Найквиста или просто теоремой отсчетов.
Теорема Котельникова. Теорема устанавливает принципиальную возможность полного восстановления детерминированной функции с ограниченным спектром по ее отсчетам и указывает предельное значение интервала времени между отсчетами, при которой такое восстановление еще возможно. Она формулируется следующим образом: функция u(t), допускающая преобразование Фурье иимеющая непрерывный спектр, ограниченный полосой частот от 0 до Fc = wc/(2p), полностью определяется дискретным рядом своих мгновенных значений, отсчитанных через интервалы времени
Dt=1/(2Fc ).
Физическая основа теоремы выявляется при рассмотрении связи между формой функции и шириной ее спектра. Только в случае, когда спектр функции безграничен, ее значения в сколь угодно близкие моменты времени могут изменяться произвольно (корреляционная связь между ними отсутствует).
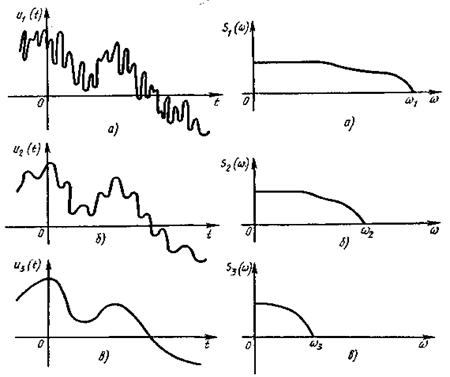
Рис.2.2
Сокращение высокочастотной части спектра до граничной частоты ω1 равнозначно устранению из временной функции выбросов, которые могли быть сформированы этими высокочастотными составляющими (рис. 2.2, а). При меньших граничных частотах ω2 (рис. 2.2, б) и ω3 (рис. 2.2, в) имеем более сглаженные функции времени. Поскольку значения этих функций в моменты времени u(t1) и u(t1 + Δt)в пределах некоторого интервала Δt не могут изменяться существенно, можно ограничиться значениями функции, взятыми через интервалы Δt (отсчетами).
|
|
|
2.3 Рабочее задание
В этом разделе мы будем использовать квантователь из библиотеки функциональных значков SystemView, чтобы квантовать входной сигнал на фиксированное количество битов. Моделирование в предыдущих случаях, входные сигналы различных лексем были с точностью плавающей точки, поэтому для большинства целей мы можем предположить, что (заметного) квантования нет.
Квантование сигнала
Соберите схему, приведенную на рисунке 2.1.
Установите следующие параметры в системе.
| Системное время | |
| Частота дискретизации, Гц | 200 |
| Число отсчетов | 256 |
| Источник пилообразного сигнала | |
| Amp = 1,875 v | |
| Freq = 5 Hz | |
| Offset = -1 v | |
| Phase = 0 deg | |
| Max Rate = 1e+3 Hz | |
| Квантователь | |
| Bits = 4 | |
| Max Input = ±1 v | |
| Signed Integer Output | |
| Max Rate = 1e+3 Hz | |
| Усилитель | Gain = -125e-3 |
| Gain Units = Linear | |
| Max Rate = 1e+3 Hz |
Система берет (с точностью плавающей точки) квантованный выходной сигнал генератора пилообразного сигнала с амплитудой напряжения 1,875 В и преобразует его в целое квантованное число. Все источники выходных сигналов в SystemView, по умолчанию установлены на точность с плавающей точкой (исключая, конечно, источники, которые считываются из файла, которые могут быть установлены на точность с фиксированной точкой).

Рисунок 2.1
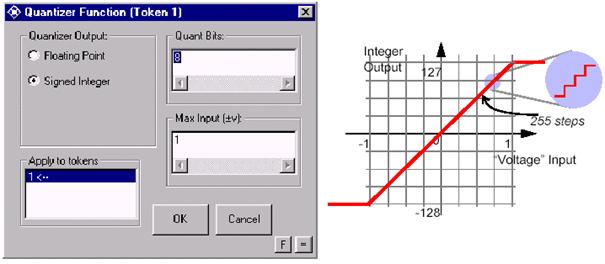
Рисунок 2.2 - Диалоговое окно квантователя
и соответствующие характеристики
ввода/вывода
а) Просмотрите параметры значка 4-х битного квантователя и убедитесь, что имеет входные/выходные характеристики, показанные на рисунке 2.2.
Обратите внимание, входной квантователь является восьмибитным, поэтому вторичная амплитуда дополнения находится в пределах от -23 до 23, например: -8 до +7.
б) Запустите систему и затем в окне анализа убедитесь, что значения выборок такие, как предполагались на выходе квантователя рассмотренного выше. (Не забудьте нажать мерцающую синим цветом кнопку «Загрузить обновленные данные блока»  , чтобы увидеть обработанные данные только прошедшего процесса моделирования).
, чтобы увидеть обработанные данные только прошедшего процесса моделирования).
в) Определите погрешность квантования, вычисление которой осуществляется модулями 3, 4 и 5. Объясните полученные результаты.
г) Модифицируйте параметры квантователя  так, чтобы обеспечить трехбитное квантование (8 уровней как показано на рисунке 2.3) с таким же ±1 колебанием напряжения, как раньше. Запустите систему и убедитесь, что результаты такие, как предполагалось, и совпадают с данными таблицами, показанными на рисунке 2.3.
так, чтобы обеспечить трехбитное квантование (8 уровней как показано на рисунке 2.3) с таким же ±1 колебанием напряжения, как раньше. Запустите систему и убедитесь, что результаты такие, как предполагалось, и совпадают с данными таблицами, показанными на рисунке 2.3.
д) Модифицируйте систему так, чтобы амплитуда пилообразного сигнала на входе была равна 2 В. Запустите систему и обратите внимание на эффект «сжимания» ADC. Это происходит потому, что присутствует проблема нелинейности, которая появляется тогда, когда входное напряжение на ADC слишком высокое.
е) Обратите внимание, что в диалоговом окне параметров квантователя, можно настроить вывод так, что он будет выводиться в форме с плавающей точкой или как целое число. Произвести такую настройку можно при помощи радио-кнопок показанных на рисунке 2.2. Теперь установите форму вывода «с плавающей точкой», запустите процесс моделирования и объясните то, что теперь показывается на выходе.

Рисунок 2.3 - 3 битный квантователь, характеристики ввода-вывода
ж) Измените модуль генератора прямоугольных импульсов на генератор синусоидальных сигналов (ГСН), запустите систему повторно при значении выходных напряжений ГСН, равных 1,75, 1,875 и 2,0 В. Объясните полученные результаты.
Дата добавления: 2018-04-05; просмотров: 1041; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!