Построение ЛАЧХ заданной (нескорректированной) системы
Передаточная функция разомкнутой системы имеет следующий вид:

Сопрягающие частоты определяют по формуле:
(4.1)
Сопрягающие частоты откладываются по оси абсцисс в логарифмическом масштабе. Откладывается точка А1 с координатами  и
и  .
.

От этой точки в область низких частот проводится прямая линия с наклоном  дБ/дек.
дБ/дек.
дБ/дек =  дБ/дек = -20 дБ/дек
дБ/дек = -20 дБ/дек
От этой же точки до следующей сопрягающей частоты проводится прямая линия под наклоном -20 дБ/дек относительно предыдущей линии, т.е. под наклоном -40 дБ/дек. От точки пересечения данной прямой с сопрягающей частотой проводится линия до следующей сопрягающей частоты под наклоном -20 дБ/дек относительно предыдущей (-60 дБ/дек). Таким образом строятся линии до последней сопрягающей частоты, а от нее проводится прямая, стремящаяся в бесконечность, под наклоном -80дБ/дек.
4.2 Построение желаемой ЛАЧХ
Построение желаемой ЛАЧХ удобно начинать с области средних частот в такой последовательности.
С помощью заданных величин  определяем частоту среза
определяем частоту среза  (4.2).
(4.2).
Для  определяем
определяем  , получаем:
, получаем:
(4.2)
Наносим на ось абсцисс частоту и проводим через нее прямую линию с наклоном -20 дБ/дек.
Частота, которая ограничивает область средних частот желаемой ЛАЧХ слева, определяется величиной отрезка  .Частота, ограничивающая область средних частот справа, определяется величиной отрезка
.Частота, ограничивающая область средних частот справа, определяется величиной отрезка  , при этом
, при этом  .
.
|
|
|
В области высоких частот желаемую ЛАЧХ строим в виде прямолинейного отрезка с наклоном -80 дБ/дек (параллельно заданной ЛАЧХ).
По заданной величине коэффициента усиления системы(4.3), определяем величину  и отмечаем на чертеже точку А2 проводим прямую линию с наклоном -20 дБ/дек.
и отмечаем на чертеже точку А2 проводим прямую линию с наклоном -20 дБ/дек.
(4.3)
От точки М, ограничивающая область средних частот слева, проводим прямую линию с наклоном -40 дБ/дек до пересечения с низкочастотной частью желаемой ЛАЧХ.
4.3 Построение запрещенной области
Поскольку в задании на разработку следящей системы указана максимальная допустимая ошибка слежения Хmax, при условии, что входной сигнал может изменяться с максимальной угловой скоростью  и с максимальным угловым ускорением
и с максимальным угловым ускорением  , то для выполнения этих требований необходимо, чтобы желаемая ЛАЧХ не попадала в запрещенную область, т.к. на низких и высоких частотах нежелательно из-за увеличивается перерегулирование, время регулирования и возможна потеря системой устойчивости. Для построения запрещенной области, найдем координаты ключевой точки.
, то для выполнения этих требований необходимо, чтобы желаемая ЛАЧХ не попадала в запрещенную область, т.к. на низких и высоких частотах нежелательно из-за увеличивается перерегулирование, время регулирования и возможна потеря системой устойчивости. Для построения запрещенной области, найдем координаты ключевой точки.
 , ,
| (4.4) |
 . .
| (4.5) |
После подстановкиполучим координаты запрещенной области:
|
|
|
 и
и  .
.
От точки В вправо проводим линию с наклоном -40 дБ/дек.
Исходя из построенных ЛАЧХ составим таблицу 4.1 для расчета передаточной функции желаемой системы и таблицу 4.2 для расчета передаточной функции корректирующего звена.
Таблица 4.3.1 – расчеты передаточной функции ЛАЧХ желаемой системы
| Координатыlgω | Т | ω = 
| наклон |
| -1,13 | 14,2 | 0,07 | -20 
|
| -0,03 | 1,07 | 0,93 | +20
|
| 1,3 | 0,05 | 19,95 | -60
|
Таблица 4.3.2 – расчеты передаточной функции ЛАЧХ последовательного корректирующего звена
| Координатыlgω | Т | ω =
| наклон |
| -1,13 | 14,2 | 0,07 | -20
|
| -0,03 | 1,07 | 0,93 | +20
|
| 0,5 | 0,316 | 3,16 | +20
|
| 1,2 | 0,06 | 15,85 | +40
|
| 1,3 | 0,05 | 19,95 | -60
|
Запишем передаточную функцию непрерывной желаемой системы(4.6):
(4.6)

В зависимости от вида ЛАЧХ записываем передаточную функцию корректирующего звена:

(4.7)
Где  ,
,  , исходя из графика. Следовательно
, исходя из графика. Следовательно 

5 МОДЕЛИРОВАНИЕ СИСТЕМЫ СЛЕЖЕНИЯ С НЕПРЕРЫВНЫМ ПОСЛЕДОВАТЕЛЬНЫМ СКОРРЕКТИРУЮЩИМ ЗВЕНОМ
Для проверки соответствия показателей качества скорректированной системы заданным показателям качества проведем моделирование переходного процесса с помощью пакета прикладных программMatlab.
|
|
|
g(t) x(t) y(t)
| Wкорр |
| Wзад |
Рисунок 5.1 - Структурная схема скорректированной САУ.
Рассчитаем передаточную функцию скорректированной системы в среде Matlab:

(5.1)

Рисунок 5.1 – передаточная функция скорректированной системы
Далее необходимо определить устойчивость скорректированной системы при помощи частотных критериев устойчивости.
Оценим устойчивость по частотному критерию Найквиста: для того, чтобы замкнутая система была устойчивой, необходимо и достаточно, чтобы АФЧХ её разомкнутой системы, с увеличением частоты от 0 до бесконечности охватывала точку (-1; j0)в положительном направлении (против часовой стрелки) l/2 раз, где l – количество правых корней характеристического уравнения разомкнутой системы.
В частности, если разомкнутая систем устойчива (l=0), то для того, чтобы замкнутая система была устойчивой, необходимо и достаточно, чтобы АФЧХ её разомкнутой системы не охватывала точку (-1;j0).
При помощи программы Matlabбыл построен годограф Найквиста (рис. 5.3).
Найдем корни характеристического уравнения при помощи программы Matlab.
|
|
|
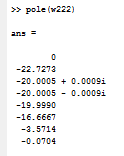
Рисунок 5.2 – корни характеристического уравнения
Корни характеристического уравнения одного знака и находятся в левой полуплоскости, это показано на рисунке 5.3.
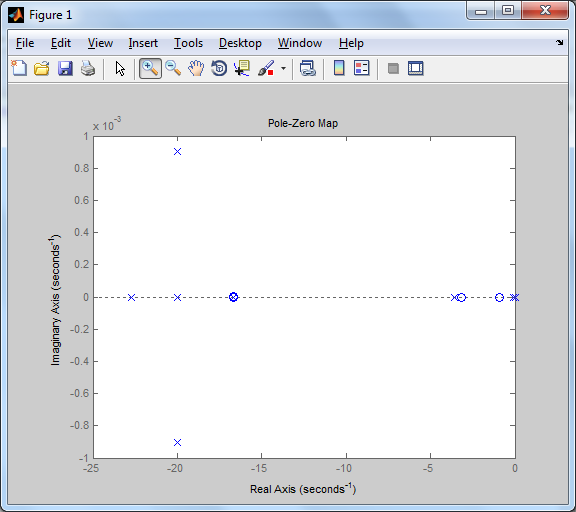
Рисунок 5.3 – корни характеристического уравнения разомкнутой системы на комплексной плоскости
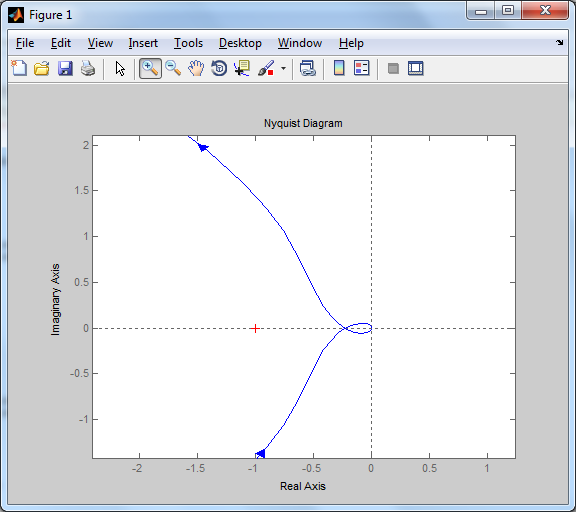
Рисунок 5.4 – АФЧХ разомкнутой системы (годограф Найквиста)
Исходя из критерия Найквиста, замкнутая система является устойчивой так как l=0 (нет правых корней) и АФЧХ разомкнутой системы не охватывает точку (-1;j0) при изменении частоты от 0 до ∞.
Оценим устойчивость замкнутой системы по критерию Михайлова.
Построим кривую Михайлова в программе Matlab.
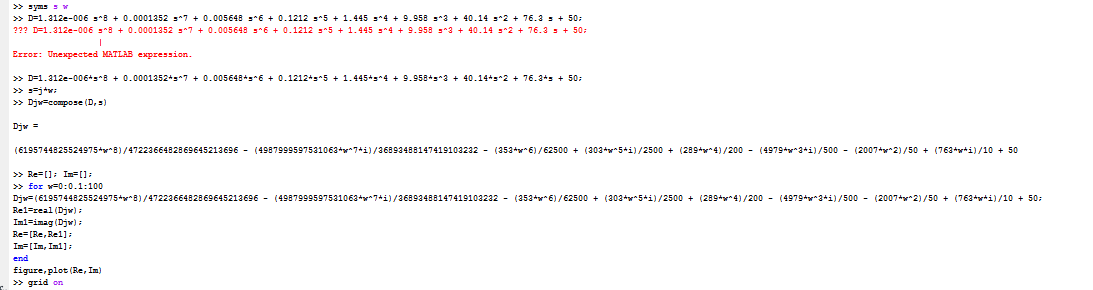
Рисунок 5.5 – фрагмент программного кода для построения кривой Михайлова
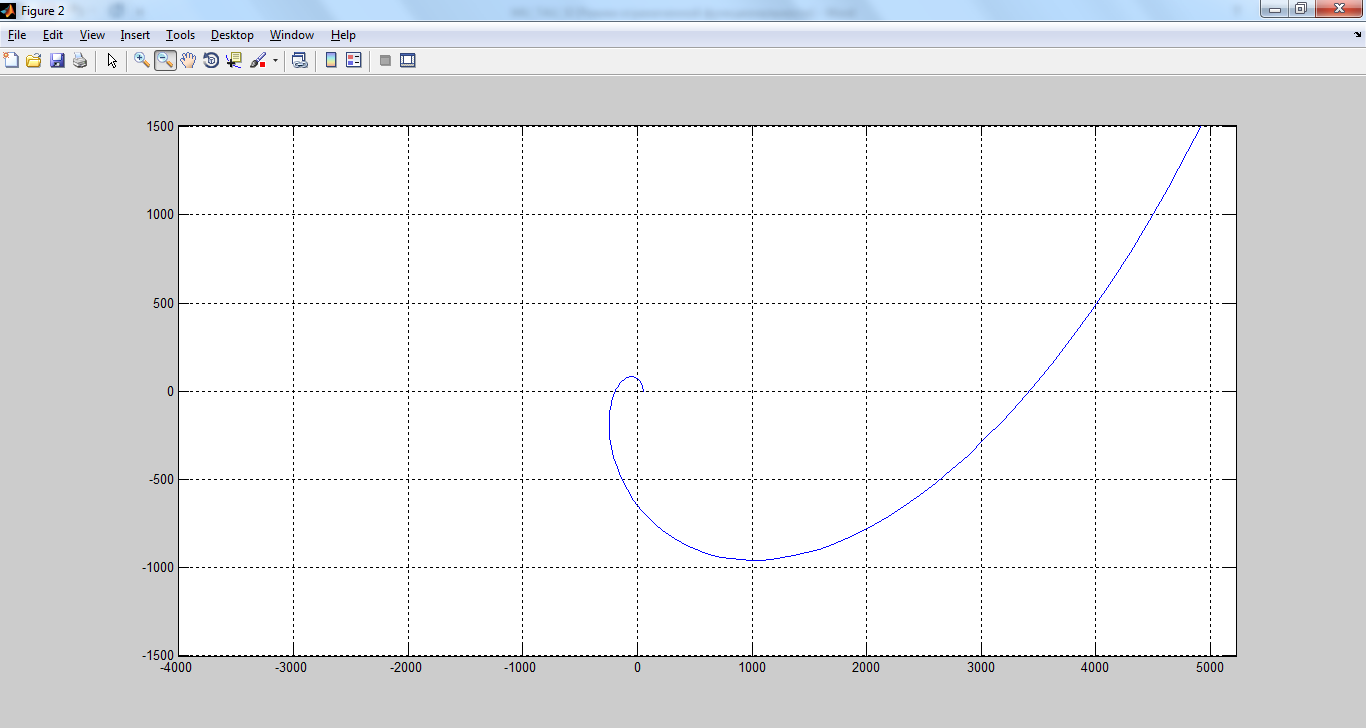
Рисунок 5.6 – Кривая Михайлова в увеличенном масштабе
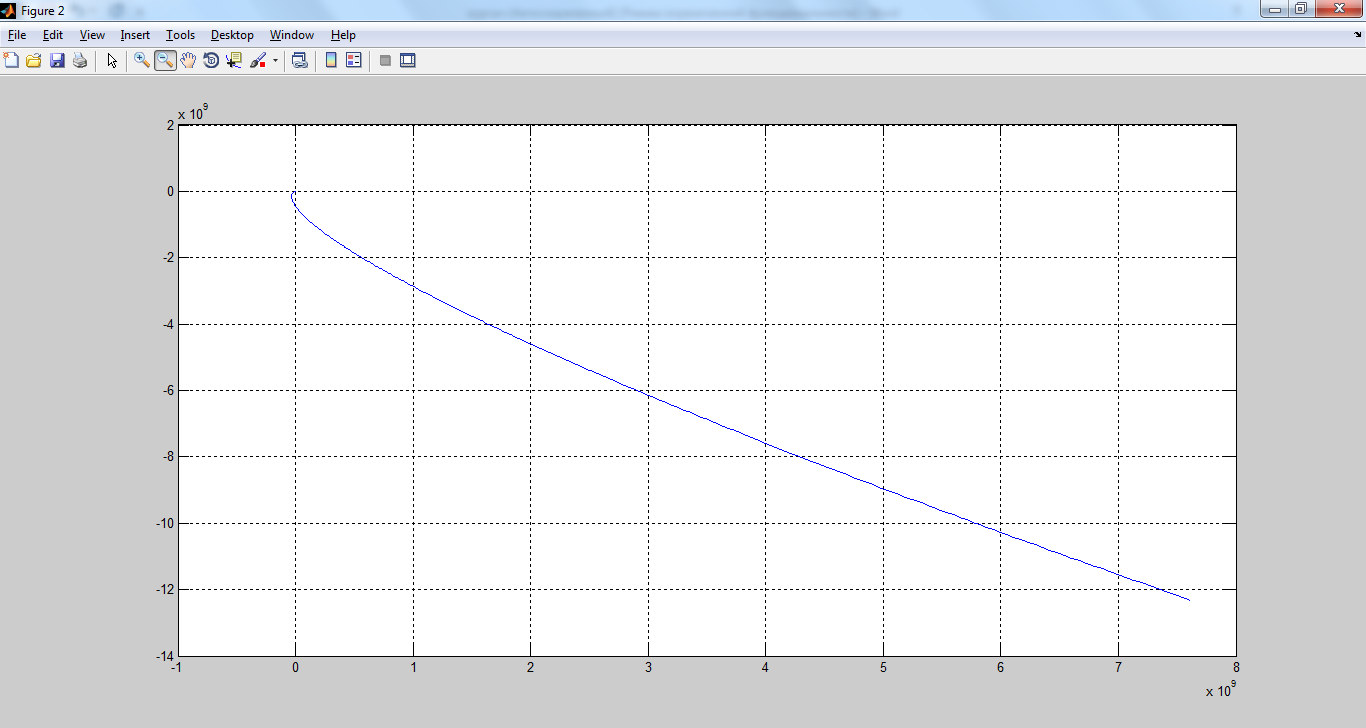
Рисунок 5.7 – кривая Михайлова в оригинальном масштабе
Критерий Михайлова: для того, чтобы система автоматического управления была устойчивой, необходимо и достаточно, чтобы кривая Михайлова при изменении частоты от 0 до ∞, начинаясь на действительно положительной полуоси, обходила последовательно nквадрантов, не попадая в начало координат.
Исходя из критерия Михайлова можно сделать вывод, что замкнутая система является устойчивой.
Построим временные характеристики системы при помощи Matlab.
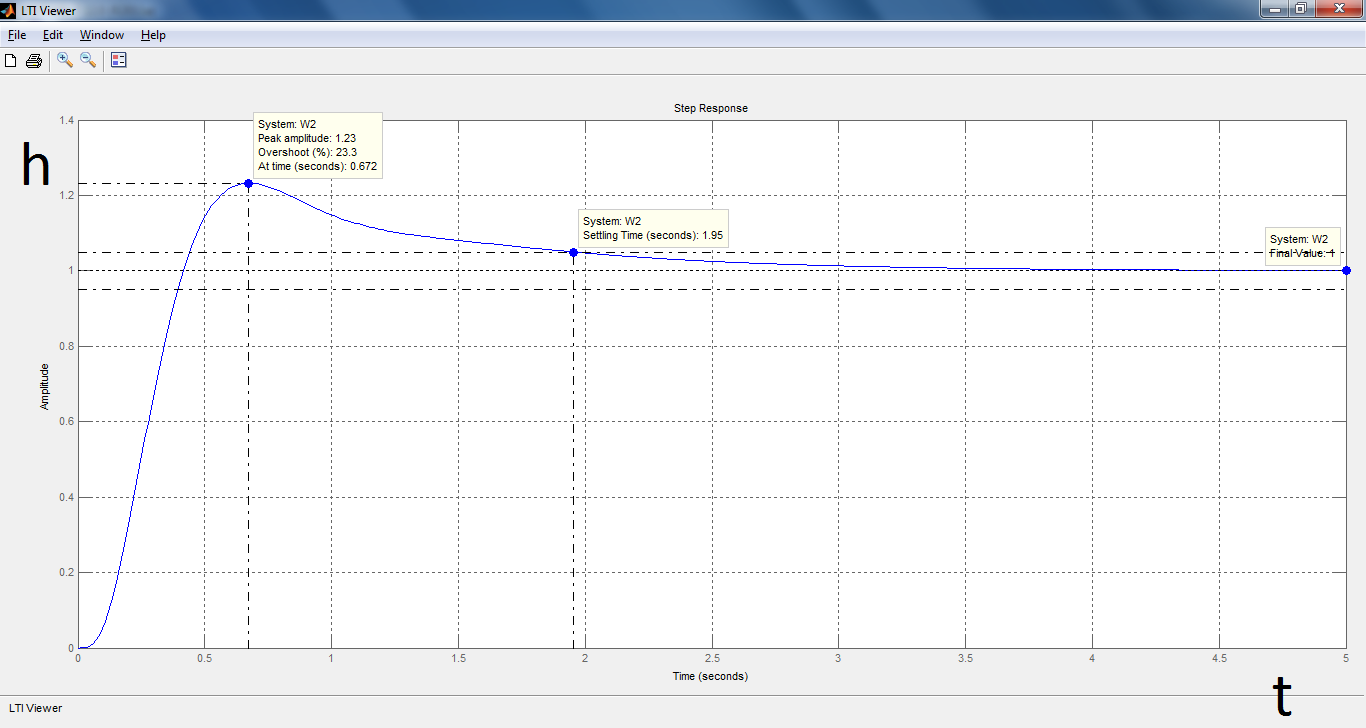
Рисунок 5.8 – переходная характеристика скорректированной системы
Переходная характеристика h(t) системы – это реакция системы на воздействие в виде единичной ступенчатой функции (функция Хевисайда) при нулевых начальных условиях.
Исходя из переходной характеристики определим прямые показатели качества: tp, Ϭ.
tp=1.95c.
(5.2)

По условию tp=3c, σ=25%. Исходя из наших полученных значений можно сделать вывод, скорректированная система удовлетворяет условиям.
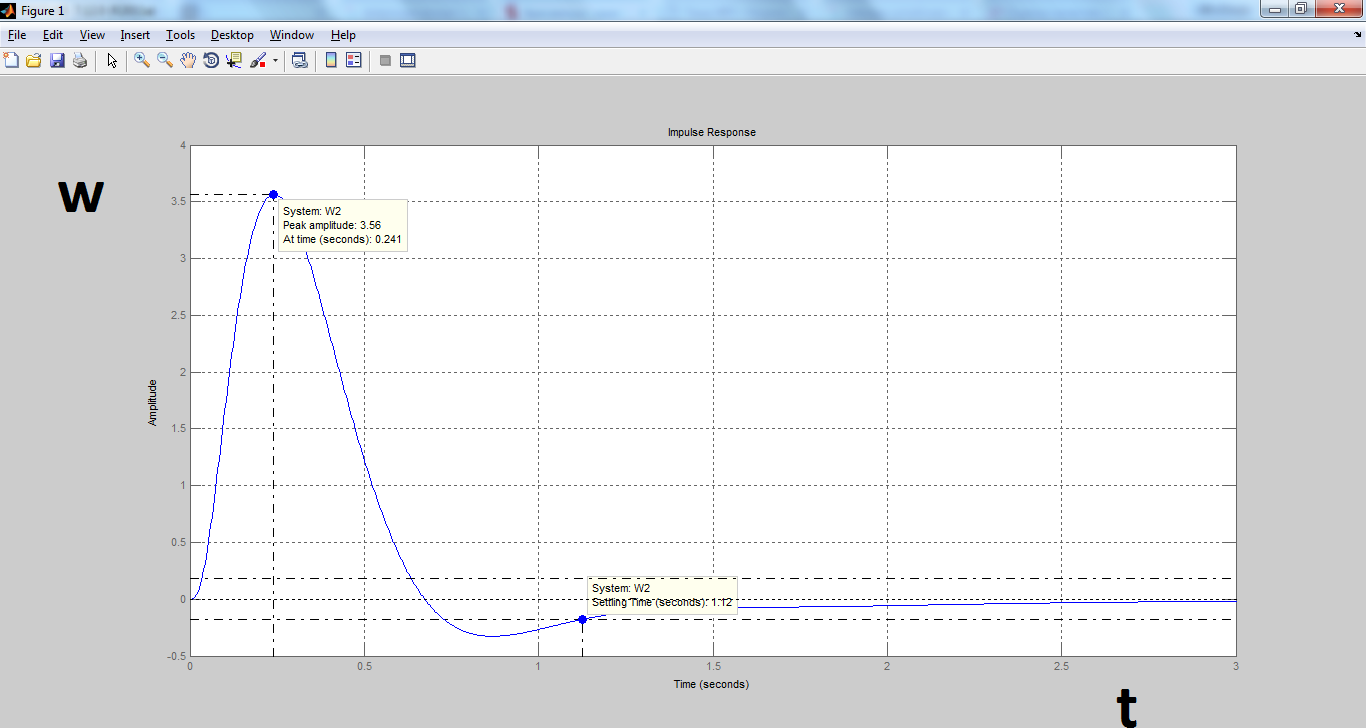
Рисунок 5.9 – импульсно-переходная характеристика скорректированной системы
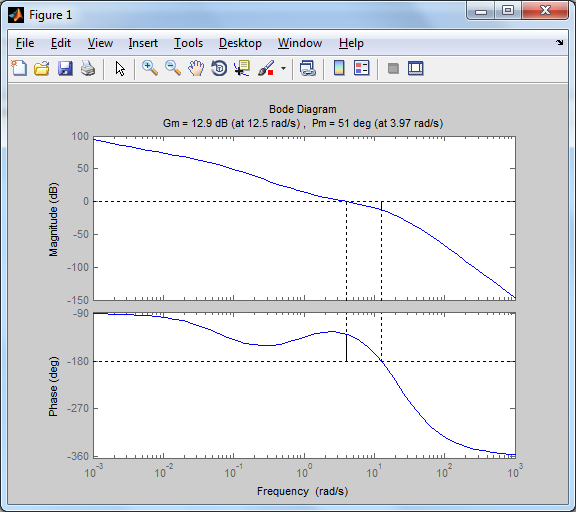
Рисунок 5.9 – определение запаса устойчивости системы
Запас устойчивости системы по фазе равняется: 51 Рад/с.
Запас устойчивости по амплитуде равняется:12,9Дб.
Рассчитаем корневые показатели качества: степень устойчивости(5.3)и колебательность(5.4) системы.
Степень устойчивости определяется как расстояние от мнимой оси до ближайшего корня характеристического уравнения исследуемой системы.
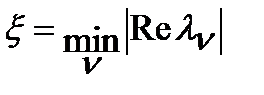
(5.3)
Найдем корни характеристического уравнения замкнутой системы для определения ближайшего корня к мнимой оси при помощи Matlab.
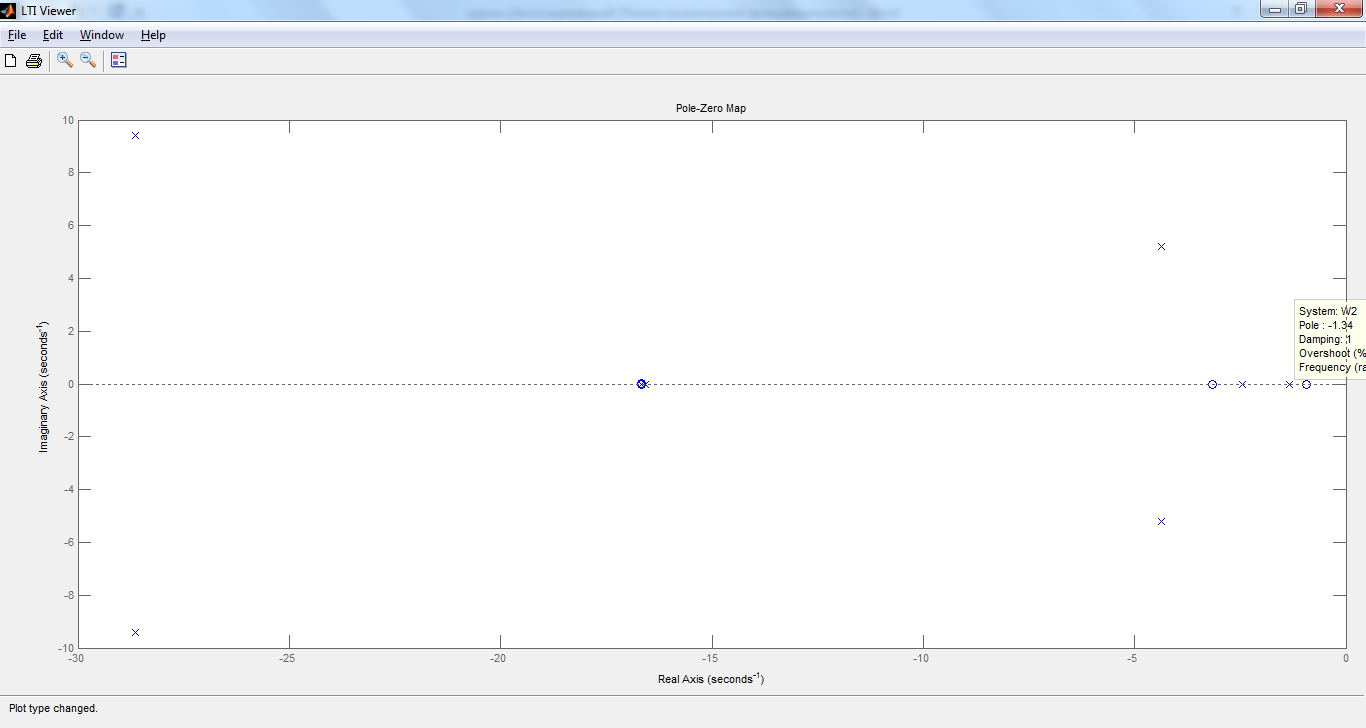
Рисунок 5.10 – корни характеристического уравнения замкнутой системы на комплексной плоскости
Значение ближайшего к мнимой оси корня равняется: -1.34. Значит степень устойчивости ξ=1.34.
Колебательность характеризует меру склоности системы к колебаниям.
Колебательность определяется как максимальное значение отношения мнимой части корня системы к действительной:
(5.4)
ВЫВОДЫ
В курсовом проекте был проведен синтез следящей линейной системы автоматического управления.
Входе выполнения работы были найдены передаточные функции элементов исследуемой системы. Построена её структурная схема. Также был найден коэффициент усиления.
Также в ходе выполнения было выполнено моделирование переходных процессов в средеMatlab. Моделирование является одной из самых важных задач анализа систем автоматического управления. Моделирование позволяет сымитировать поведение реальной системы в разных условиях эксплуатации, исследовать и исправить все недостатки или ошибки системы без затрат на производство.
СПИСОК ЛИТЕРАТУРЫ
1. Сенигов П.Н. Теория автоматического управления– Челябинск: ЮУрГУ, 2001
2. Теория автоматического управления: учеб. пособие / М.М. Савин, В.С.Елсуков, О.Н. Пятина; под. ред. д.т.н., проф. В.И. Лачина. – Ростов н/Д: Феникс, 2007
3. Шидловский С.В. Теория автоматического управления: Учебное посо- бие. – Томск: Изд-во НТЛ, 2005.
4. Методические указания по курсовому проектированию по дисциплине «Теория автоматического управления» для студентов дневной формы обучения направления 6.050501 – «Системная инженерия» [Текст],/Упоряд. Токарева Е. В., Малик Б. А. – Харьков: ХНУРЭ, 2015. – 40 с.
Дата добавления: 2018-04-05; просмотров: 620; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!