Кинематика движения твердого тела
В этом разделе рассмотрим некоторые особенности кинематики движения твердого тела. Твердым телом называется система материальных точек (чаще всего бесконечная), расстояние между любыми двумя из которых в процессе движения остается постоянным. Пусть имеется движущееся твердое тело. Пусть в некоторый момент времени скорость некоторой точки А тела равна vA, а скорость некоторой точки В равна vB. Проведем прямую, соединяющую точки А и В. Пусть угол между вектором vA и прямой АВ равен α, а между вектором vB и этой прямой – β. Расстояние между точками А и В должно быть постоянным. Значит скорость с которой точка А удаляется от точки В должна быть равна скорости, с которой точка В приближается к точке А. То есть для любых двух точек А и В твердого тела должно выполняться условие:  . Словами можно записать так: при движении твердого тела проекции скоростей любых двух точек тела на направление, соединяющее эти точки, должны быть одинаковыми.
. Словами можно записать так: при движении твердого тела проекции скоростей любых двух точек тела на направление, соединяющее эти точки, должны быть одинаковыми.
Рассмотрим еще раз произвольно движущееся твердое тело. Пусть в некоторый момент времени скорость некоторой точки А тела равна vA, а скорость некоторой точки В равна vB. Проведем через точки А и В две прямые АО и ВО перпендикулярные векторам vA и vB до точки их пересечения О. Рассмотри две точки А и О. Проекции скоростей этих двух точек на направление АО должны быть одинаковыми. Но проекция вектора vA на это направление равна нулю. Значит и проекция скорости точки О на направление АО тоже равна нулю. Рассмотри теперь пару точек В и О. Аналогичные рассуждения приводят к выводу о том, что проекция скорости точки О и на направление ВО тоже равна нулю. Это может быть только в одном случае: если скорость точки О равна нулю. Рассмотрим теперь произвольную третью точку С. Соединим ее с точкой О прямой СО. Так как скорость точки О равна нулю, то проекция ее скорости на направление СО равно нулю. А это значит, что проекция скорости точки С на направление СО тоже равна нулю, то есть скорость точки С направлена перпендикулярно СО. Причем это справедливо для любой точки тела. Получается, что в данный момент времени тело вращается вокруг неподвижной точки О. Таким образом, произвольное движение твердого тела в любой момент времени может быть представлено как чистое вращение вокруг некоторой неподвижной точки. Причем в следующий момент времени эта точка будет другой. Эта точка называется мгновенным центром вращения. Пусть точка О в данный момент времени является мгновенным центром вращения и тело вращается вокруг нее в угловой скоростью ω. Тогда для любой точки тела можно написать:

Относительность движения
Пусть имеется две системы отсчета. Одну из них мы будем считать неподвижной, а вторая пусть движется относительно неподвижной. Пусть имеется движущееся тело. Пусть нам известно, что за некоторое время Δt тело переместилось относительно движущейся системы отсчета на величину Δr1, а подвижная система отсчета за то же время переместилась относительно неподвижной системы на величину Δr2. Тогда суммарное перемещение тела относительно неподвижной системы отсчета, очевидно, будет равно: Δr = Δr1 + Δr2. Разделим это равенство на Δt и получим:

Где v1 – скорость тела относительно подвижной системы отсчета, которую обычно называют относительной скоростью; v2 – скорость подвижной системы отсчета относительно неподвижной, которую обычно называют переносной скоростью; v – скорость тела относительно неподвижной системы отсчета, которую обычно называют абсолютной скоростью. Таким образом, получаем классическую формулу сложения скоростей:

Эту формулу можно записать в другом виде, часто очень полезном при решении задач. Пусть имеется два движущихся тела. Известно, что скорость первого тела относительно неподвижной системы отсчета равна v1, а скорость второго тела относительно неподвижной системы отсчета равна v2. Чему равна скорость второго тела относительно первого? В этом случае следует связать с первым телом подвижную систему отсчета. Тогда скорость v1 будет представлять собой скорость подвижной системы отсчета относительно неподвижной, то есть переносную скорость. Скорость v2 будет представлять собой скорость тела относительно неподвижной системы отсчета, то есть абсолютную скорость. А скорость второго тела относительно первого (обозначим ее v21) будет представлять собой скорость тела относительно подвижной системы отсчета, то есть относительную скорость. Запишем формулу сложения скоростей:  . Откуда получаем:
. Откуда получаем:

Заметим, что скорость первого тела относительно второго равна:  .
.
ДИНАМИКА
Первый закон Ньютона
В античной механике считалось, что для возникновения и поддержания движения тела на него надо действовать. Если на тело перестать действовать, то оно неизбежно остановится. Эта точка зрения как будто соответствовала повседневному жизненному опыту и поэтому продержалась очень долго. Только в конце XVI века Галилео Галилей изменил этот взгляд на природу движения. Он обратил внимание на то, что в реальных условиях на движущееся тело всегда действуют какие-либо силы сопротивления. Поэтому, если на движущееся тело перестать действовать, поддерживая его движение, то силы сопротивления продолжают действовать и под их действием тело в конечном итоге останавливается. Галилей мысленно попытался представить, как будет двигаться тело, если уменьшить или полностью исключить силы сопротивления. В результате мысленных экспериментов Галилей пришел к выводу, что если на движущееся тело вообще ничего не будет действовать, то оно будет двигаться вечно с постоянной скоростью. Предоставленное самому себе тело движется без изменения состояния своего движения. Наоборот, для того, чтобы изменить состояние движения тела требуется воздействовать на него со стороны. Этот факт получил название принципа инерционности Галилея.
Движение тела после прекращения действия на него других тел получило название движения по инерции. Из принципа инерционности следует, что для изменения состояния движения тела необходимо воздействовать не него со стороны. Значит, любое тело всегда сопротивляется попыткам изменить состояние своего движения, стараясь сохранить его неизменным. Это свойство тел называется инертностью.
Однако следует заметить, что любое движение описывается относительно какой-то системы отсчета. Системы отсчета бывают разные. Причем разные системы отсчета могут двигаться относительно друг друга произвольным образом. При этом может получиться следующая ситуация. Пусть имеется тело, на которое ничего не действует и оно движется по инерции без изменения состояния своего движения, то есть равномерно и прямолинейно относительно какой-либо системы отсчета. Однако, если имеется другая система отсчета, движущаяся относительно первой с ускорением, то относительно нее тело будет уже двигаться с ускорением, хотя на него ничего не действует. Получается, что относительно первой системы отсчета принцип инерционности Галилея выполняется, а относительно второй не выполняется.
Таким образом, принцип инерционности Галилея делит все системы отсчета на две категории. Хорошие системы отсчета, относительно которых принцип инерционности выполняется, и плохие, относительно которых он не выполняется. Исаак Ньютон обобщил результаты Галилея и сформулировал их в виде первого закона классической механики, который называется первым законом Ньютона: Существуют такие системы отсчета, относительно которых тело движется равномерно и прямолинейно или находится в состоянии покоя, если на него никакие другие тела не действуют или действие всех других тел полностью скомпенсировано.
Своим первым законом Ньютон утверждает, что хорошие системы отсчета существуют. Такие системы отсчета называются инерциальными. Дело в том, что принцип инерционности Галилея и остальные законы Ньютона, а значит и все законы классической механики справедливы только относительно инерциальных систем отсчета. Если существует хотя бы одна инерциальная система отсчета, то, значит, их существует множество. Ибо любая другая система отсчета, движущаяся относительно этой одной равномерно и прямолинейно тоже будет инерциальной. Это хорошо понимал Ньютон и указал абсолютно инерциальную систему отсчета, поместив начало системы координат в центр Солнца, а три координатные оси направив на три бесконечные звезды. Эта система сейчас конечно не является абсолютной, но она до сих пор является практически инерциальной почти для всех задач современного человечества. Очень хорошей инерциальной системой отсчета является система, связанная с поверхностью Земли. Хоть Земля и «крутится», но ускорение точек поверхности Земли настолько мало, что связанная с этим неинерциальность практически незаметна для большинства практических задач.
Второй закон Ньютона
Причиной изменения скорости движения тела в инерциальной системе отсчета является его взаимодействие с другими телами. Для количественного описания изменения движения тел при их взаимодействии необходимо ввести две новые величины: массу и силу.
Масса – это количественная характеристика меры инертности тел. При одинаковом воздействии разные тела по разному изменяют скорость своего движения. Так же, прикладывая разные воздействия к одному и тому же телу, мы будем получать разные ускорения. Для того чтобы остановить катящуюся тележку, необходимо приложить некоторое усилие. Однако всем понятно, что если эту тележку загрузить кирпичом, то требуемое усилие окажется намного больше.
Если взаимодействуют два тела, то каждое из них в результате взаимодействия приобретает ускорение. Причем, как показывает опыт, отношение ускорений тел при разных взаимодействиях оказывается одинаковым:  . Под массой тел принимается величина такая, что отношение масс тел оказывается обратным отношению ускорений:
. Под массой тел принимается величина такая, что отношение масс тел оказывается обратным отношению ускорений:

В системе СИ масса тел измеряется в килограммах [кг]. Килограмм – основная единица системы СИ. Масса любого тела может быть экспериментально измерена путем ее сравнения с массой эталона 1 кг. Это сравнение может быть выполнено либо путем взаимодействия тел, либо путем взвешивания. Масса – величина скалярная. Причем масса величина аддитивная, то есть, если взять и соединить два тела с массами m1 и m2, то получится тело, масса которого равна m1 + m2.
Сила является мерой взаимодействия тел. Под действием сил тела приобретают ускорения. Сила - величина векторная. Силы измеряются путем их сравнения с некоторым эталоном силы, которым может служить эталонная пружина, растянутая на определенную величину. Однако на практике для измерения сил используются отградуированные пружины, называемые динамометрами. Единицей измерения силы в системе СИ является ньютон [Н].
Второй закон Ньютона является основным законом механики. Этот закон выполняется только в инерциальных системах отсчета и является обобщением огромного количества экспериментальных фактов. Опыт показывает, что ускорение, приобретаемое телом в результате действия на него некоторой силы, прямо пропорционально действующей силе и обратно пропорционально массе тела. Единицы силы и массы подобраны таким образом, что коэффициент пропорциональности оказывается равным единице. Поэтому количественно второй закон Ньютона записывается следующим образом:

Второй закон Ньютона – векторный закон. Это означает, что вектор ускорения тела всегда совпадает по направлению с вектором действующей на него силы. Если на тело действуют несколько сил, то ускорение тела определяется векторной суммой всех действующих сил, которая называется равнодействующей:

Второй закон Ньютона – векторный закон и на практике его обычно используют в виде проекции на оси координат. Так, например, в проекции на ось Х второй закон Ньютона обычно записывается так:

Произведение массы тела на проекцию его ускорения на ось Х равно алгебраической сумме проекций всех действующих на него сил на ось Х.
Третий закон Ньютона
Сила всегда является результатом взаимодействия. Это значит, что если на тело действует какая-то сила, то обязательно должно существовать еще какое-то тело, являющееся источником этой силы. Кроме того, если первое тело действует на второе, то и второе обязательно действует на первое. То есть у любой силы действия обязательно должна существовать парная ей сила противодействия. Третий закон Ньютона заключается в том, что силы действия и противодействия, с которыми тела действуют друг на друга, всегда равны по модулю, противоположны по направлению и направлены вдоль прямой, соединяющей тела. Кроме того, силы действия и противодействия всегда являются силами одной природы, то есть, если сила действия является силой трения, то и сила противодействия тоже является силой трения и так далее. Если обозначить силу, действующую со стороны первого тела на второе F12, а силу, действующую со стороны второго тела на первое F21, то третий закон Ньютона можно записать так:

Три закона Ньютона являются фундаментом классической механики. Следует заметить, что строго они скорее являются не законами, а аксиомами, так как они не выводятся и не доказываются, а являются результатом обобщения огромного количества экспериментальных фактов и принимаются без доказательства. Еще раз отметим, что законы Ньютона справедливы только в инерциальных системах отсчета.
Механические силы
Все многообразие сил в природе сводится к четырем фундаментальным взаимодействиям: гравитационное, электромагнитное, ядерное сильное и ядерное слабое. Ядерные сильное и слабое взаимодействия проявляются только на уровне ядерных взаимодействий и в реальной жизни мы их никак не воспринимаем. Поэтому все разнообразие реальных сил является разновидностью гравитационных и электромагнитных сил.
В механике рассматривается три типа сил: сила трения, сила упругости и сила всемирного тяготения. Причем сила трения и сила упругости по природе своей являются силами электромагнитной природы. Самой распространенной силой, которая действует на все тела, находящиеся в поле тяжести Земли, является сила тяжести. Она равна произведению массы тела на ускорение свободного падения mg и направлена вертикально вниз или более точно к центру Земли. Сила тяжести является разновидностью гравитационной силы. Если тело находится на какой-то поверхности, то под действием силы тяжести оно давит на эту поверхность. По третьему закону Ньютона поверхность действует на тело с силой равной по модулю и противоположной по направлению. Эта сила называется силой реакции опоры (N) и является разновидностью силы упругости.
Далее рассмотрим более подробно механические силы по отдельности.
Сила трения
Сила трения является одной из самых распространенных механических сил. Она возникает каждый раз когда тело начинает двигаться или когда его пытаются сдвинуть с места. Существует четыре вида сил трения:
· сила трения покоя;
· сила трения скольжения;
· сила трения качения;
· сила вязкого трения (сила сопротивления).
Сила трения качения и сила вязкого трения в школьном курсе физики почти не рассматриваются. Сила трения качения обычно невелика и ей обычно пренебрегают по сравнению с остальными видами силы трения. Сила вязкого трения не рассматривается потому, что о ней в школьном курсе физики ничего существенного сказать нельзя в связи со сложностью используемого для этого математического аппарата.
Сила трения покоя.
Сила трения покоя возникает между соприкасающимися телами каждый раз, когда одно тело пытаются сдвинуть относительно другого, а оно не движется. Сила трения покоя направлена параллельно поверхности соприкосновения тел в сторону противоположную направлению внешней сдвигающей силы и по модулю равна проекции внешней сдвигающей силы на плоскость соприкосновения тел. Сила трения покоя возрастает с возрастанием внешней силы. Но если внешняя сила может возрастать неограниченно, то, как показывает практика, у силы трения покоя есть максимальное значение. Это максимальное значение определяется силой, с которой соприкасающиеся поверхности прижимаются друг к другу (силой нормального давления). Практика показывает, что максимальное значение силы трения покоя прямо пропорционально силе нормального давления. Коэффициент пропорциональности носит название коэффициента трения покоя:

Коэффициент трения покоя определяется материалом, из которого сделаны соприкасающиеся поверхности и степенью их обработки и не зависит от площади соприкосновения.
В общем случае для величины силы трения покоя справедливо неравенство:

Сила трения скольжения.
Если величина внешней сдвигающей силы превышает максимальное значение силы трения покоя, то начинается скольжения. Сила трения покоя при этом исчезает и появляется сила трения скольжения. В отличие от силы трения покоя сила трения скольжения постоянна и ее величина тоже пропорциональна силе нормального давления. Коэффициент пропорциональности называется коэффициентом трения скольжения:

Сила трения скольжения направлена также параллельно поверхности соприкосновения тел и в сторону противоположную скорости относительного движения соприкасающихся поверхностей. Коэффициент трения скольжения также определяется материалом и степенью обработки соприкасающихся поверхностей и не зависит от площади соприкосновения.
Максимальное значение силы трения покоя всегда несколько больше силы трения скольжения. На рисунке приведен примерный характерный график зависимости силы трения от внешней сдвигающей силы.
| F |
| 450 |
| Fтр |
| Fпок. max |
| Fск |

Сила упругости
Сила упругости возникает при деформации тел под действием внешней силы. Деформацией тела называется изменение его формы и размеров. При действии на тело некоторой внешней силы тело деформируется. В результате этого в теле возникают внутренние силы, стремящиеся вернуть телу прежнюю форму. Равнодействующая этих сил направлена противоположно внешней силе и называется силой упругости.
Деформации бывают обратимыми и необратимыми или, что то же самое, упругими и пластическими. Деформация называется упругой или обратимой, если она полностью исчезает после снятия внешней нагрузки и тело полностью восстанавливает свою первоначальную форму. Если после снятия внешней нагрузки остается остаточная деформация, то она называется пластической или неупругой.
Мы в дальнейшем будем рассматривать только упругие деформации. Экспериментально установлено, что для упругой деформации возникающая сила упругости прямо пропорциональна величине деформации. Рассмотрим прямой стержень. Пусть начальная длина стержня равна l0. Если стержень сжать внешней силой, то его длина уменьшится и станет равна l. Опыт показывает, что возникающая при этом сила упругости прямо пропорциональна величине деформации  . То есть можно написать:
. То есть можно написать:  , где k – коэффициент пропорциональности. При растяжении стержня на Δl тоже возникает сила упругости. Причем в пределах упругой деформации силы упругости, возникающие при растяжении и сжатии стержня на Δl одинаковые. Поэтому для деформаций сжатия – растяжения можем написать:
, где k – коэффициент пропорциональности. При растяжении стержня на Δl тоже возникает сила упругости. Причем в пределах упругой деформации силы упругости, возникающие при растяжении и сжатии стержня на Δl одинаковые. Поэтому для деформаций сжатия – растяжения можем написать:

Где  - деформация. Записанное выражение называется законом Гука. Коэффициент пропорциональности k называется коэффициентом жесткости или просто жесткостью. Единицей измерения жесткости является [Н/м]. Закон Гука можно записывать при деформации пружин, при растяжении резинки и так далее. Закон Гука можно записать в векторном виде:
- деформация. Записанное выражение называется законом Гука. Коэффициент пропорциональности k называется коэффициентом жесткости или просто жесткостью. Единицей измерения жесткости является [Н/м]. Закон Гука можно записывать при деформации пружин, при растяжении резинки и так далее. Закон Гука можно записать в векторном виде:

Здесь  - перемещение точки приложения силы в результате деформации. Знак минус означает, что сила упругости всегда направлена в сторону противоположную направлению деформации тела.
- перемещение точки приложения силы в результате деформации. Знак минус означает, что сила упругости всегда направлена в сторону противоположную направлению деформации тела.
Сила всемирного тяготения
Все тела взаимодействуют друг с другом. Это предположение зародилось у Ньютона в 1667 году. Ньютон понимал, что для того, чтобы Луна вращалась вокруг Земли, а Земля и другие планеты вокруг Солнца, должна существовать сила, удерживающая их на круговой орбите. Он предположил, что сила тяжести, действующая на все тела на Земле и сила, удерживающая планеты на их круговых орбитах, есть одна и та же сила. Эта сила получила название сила всемирного тяготения или гравитационная сила. Эта сила является силой притяжения и действует между всеми телами. Ньютон сформулировал закон всемирного тяготения: две материальные точки притягиваются друг к другу с силой прямо пропорциональной произведению их масс и обратно пропорциональной квадрату расстояния между ними.

Коэффициент пропорциональности G во времена Ньютона был неизвестен. Впервые он был экспериментально измерен английским ученым Кавендишем. Этот коэффициент называется гравитационной постоянной. Ее современное значение равно  . Гравитационная постоянная является одной из самых фундаментальных физических констант. Закон всемирного тяготения можно записать в векторном виде. Если сила, действующая на вторую точку со стороны первой равна F21, а радиус-вектор второй точки относительно первой равен R21, то:
. Гравитационная постоянная является одной из самых фундаментальных физических констант. Закон всемирного тяготения можно записать в векторном виде. Если сила, действующая на вторую точку со стороны первой равна F21, а радиус-вектор второй точки относительно первой равен R21, то:

Представленный вид закона всемирного тяготения справедлив только для гравитационного взаимодействия материальных точек. Для тел произвольной формы и размеров его использовать нельзя. Вычисление гравитационной силы в общем случае является очень непростой задачей. Однако, есть тела, не являющиеся материальными точками, для которых гравитационную силу можно считать по приведенной формуле. Это тела, обладающие сферической симметрией, например, имеющие форму шара. Для таких тел приведенный закон справедлив, если под расстоянием R понимать расстояние между центрами тел. В частности силу тяжести, действующую на все тела со стороны Земли можно считать по этой формуле, так как Земля имеет форму шара, а все остальные тела можно считать материальными точками по сравнению с радиусом Земли.
Так как сила тяжести является гравитационной силой, то можно написать, что сила тяжести, действующая на тело массой m равна

Где МЗ и RЗ – масса и радиус Земли. С другой стороны сила тяжести равна mg, где g – ускорение свободного падения. Значит ускорение свободного падения равно

Это формула для ускорения свободного падения на поверхности Земли. Если удаляться от поверхности Земли, то расстояние до центра Земли будет увеличиваться, а ускорение свободного падения соответственно уменьшаться. Так на высоте h над поверхностью Земли ускорение свободного падения равно:

Вес тела. Невесомость
На любое тело, находящееся в поле тяжести Земли, действует сила тяжести. Если тело неподвижно, то эта сила тяжести должна уравновешиваться силой реакции опоры или силой натяжения подвеса. По третьему закону Ньютона тело должно действовать на опору или подвес с силой равной по модулю и противоположной по направлению. Сила, с которой тело под влиянием притяжения Земли действует на опору или подвес, называется весом тела.
Причем для неподвижного тела вес тела численно равен силе тяжести. Однако вес тела равен его силе тяжести, только если тело неподвижно или движется без ускорения. Рассмотрим вес тела, движущегося с ускорением.
Пусть тело массой m находится на опоре и движется с ускорением а. На тело действуют сила тяжести mg и сила реакции опоры N. Запишем второй закон Ньютона для тела:  . Откуда получается:
. Откуда получается:  . По третьему закону Ньютона вес тела вес тела равен
. По третьему закону Ньютона вес тела вес тела равен  . Или
. Или

Как видно, вес тела, движущегося с ускорением, не равен mg. Он может быть как больше, так и меньше mg. Причем, если ускорение тела а направлено вертикально вверх, то вес тела равен  , а если ускорение направлено вертикально вниз, то
, а если ускорение направлено вертикально вниз, то  .
.
Если ускорение тела равно ускорению свободного падения g, то вес тела равен нулю (  ). Состояние, при котором вес тела равен нулю, называется состоянием невесомости. Так любое тело, находящееся в состоянии свободного падения, находится в состоянии невесомости. Так, например, тело, брошенное под углом к горизонту, находится в состоянии невесомости. Тела, находящиеся внутри космического корабля, движущегося вокруг Земли с выключенными двигателями, находятся в состоянии невесомости. Любой из нас, подпрыгнув вверх, на короткое время прыжка оказывается в состоянии невесомости.
). Состояние, при котором вес тела равен нулю, называется состоянием невесомости. Так любое тело, находящееся в состоянии свободного падения, находится в состоянии невесомости. Так, например, тело, брошенное под углом к горизонту, находится в состоянии невесомости. Тела, находящиеся внутри космического корабля, движущегося вокруг Земли с выключенными двигателями, находятся в состоянии невесомости. Любой из нас, подпрыгнув вверх, на короткое время прыжка оказывается в состоянии невесомости.
Орбитальное движение
Рассмотрим свободное движение некоторого космического тела по замкнутой орбите вокруг какой-либо планеты (например, искусственного спутника вокруг Земли). Такое движение называется орбитальным движением. Для простоты будем рассматривать орбитальное движение по круговой орбите. Пусть спутник массой m движется по круговой орбите радиусом R вокруг планеты массой М. Если двигатели спутника не работают, то на спутник действует только сила гравитационного притяжения со стороны планеты. Ускорение спутника является чисто центростремительным. Поэтому второй закон Ньютона для спутника записывается так:

Отсюда получаем выражение для скорости движения спутника, которая называется орбитальной скоростью:

Из этого выражения видно, что орбитальная скорость зависит от радиуса обиты движения. Причем, при увеличении радиуса орбиты скорость уменьшается, а при уменьшении радиуса скорость увеличивается. Увеличивать радиус орбиты движения можно, в принципе, до бесконечности. Поэтому орбитальная скорость может быть сколько угодно маленькой. А вот уменьшать радиус орбиты до нуля нельзя. У каждой планеты есть свой радиус и радиус обиты движения спутника не может быть меньше радиуса планеты. Поэтому для каждой планеты существует максимальная скорость орбитального движения. Она соответствует движению спутника по орбите, радиус которой практически равен радиусу планеты. Эта максимальная скорость орбитального движения называется первой космической скоростью. Пусть радиус планеты равен R0. Тогда первая космическая скорость равна:

Учитывая, что ускорение свободного падения на поверхности планеты равно:

Для первой космической скорости можно написать еще одно выражение:

Для Земли: g0 = 9,8 м/с2, R0 = 6400 км. Значит первая космическая скорость для Земли равна ≈ 7,9 км/с.
Существует еще понятие второй космической скорости. Это минимальная скорость, которую надо сообщить телу на поверхности планеты, чтобы оно смогло покинуть зону притяжения планеты. Без вывода напишем, что  . Для Земли вторая космическая скорость равна ≈ 11,2 км/с.
. Для Земли вторая космическая скорость равна ≈ 11,2 км/с.
Законы Кеплера
На самом деле орбитой движения любого спутника вокруг планеты, так же как и любой планеты вокруг Солнца почти никогда не является окружность. В 1679 году Ньютон показал, что орбитой движения любого тела в поле тяготения является так называемое коническое сечение.
Коническим сечением называется линия, получающаяся в результате пересечения прямого конуса с плоскостью. В результате таких пересечений получаются: окружность, эллипс, парабола и гипербола.
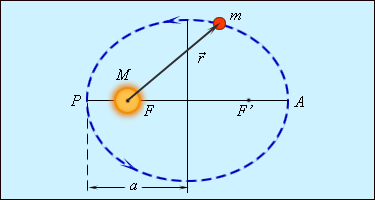 При движении тела по замкнутой орбите траекторией, чаще всего, является эллипс (окружность является частным случаем эллипса). Эллипс определяется большой полуосью а и малой полуосью b. У эллипса имеются две особые точки, называемые фокусами эллипса (F и F’). Особенностью фокусов является то, что сумма расстояний от любой точки эллипса до его фокусов – есть величина постоянная. Если большая и малая полуоси эллипса равны, то эллипс является окружностью. При этом
При движении тела по замкнутой орбите траекторией, чаще всего, является эллипс (окружность является частным случаем эллипса). Эллипс определяется большой полуосью а и малой полуосью b. У эллипса имеются две особые точки, называемые фокусами эллипса (F и F’). Особенностью фокусов является то, что сумма расстояний от любой точки эллипса до его фокусов – есть величина постоянная. Если большая и малая полуоси эллипса равны, то эллипс является окружностью. При этом  , где R – радиус окружности, а фокусы сливаются в одну точку О – центр окружности.
, где R – радиус окружности, а фокусы сливаются в одну точку О – центр окружности.
Однако при движении тела в центральном поле тяготения траектория движения не всегда является замкнутой линией. Вид траектории определяется полной энергией тела и, в частности его скоростью. Если космическому кораблю на небольшой высоте от поверхности Земли сообщить первую космическую скорость 7,9 км/с, то он будет двигаться вокруг Земли по круговой орбите. Если сообщить кораблю большую скорость, то он начнет двигаться по эллипсу. Причем, чем большую скорость мы сообщим, тем более вытянутым будет эллипс. При увеличении скорости эллипс становится все более и более вытянутым и, наконец, если начальная скорость корабля будет равна второй космической скорости 11,2 км/с, то траектория корабля перестанет быть замкнутой и превратится в параболу. При еще большей скорости траектория становится гиперболой.
 В конце XVI века датский астроном Тихо Браге провел большую серию очень точных наблюдений орбит планет Солнечной системы. Его ученик немецкий астроном Иоганн Кеплер проанализировал результаты наблюдений Тихо Браге и сформулировал три закона, которым подчиняется движение всех известных на то время планет Солнечной системы.
В конце XVI века датский астроном Тихо Браге провел большую серию очень точных наблюдений орбит планет Солнечной системы. Его ученик немецкий астроном Иоганн Кеплер проанализировал результаты наблюдений Тихо Браге и сформулировал три закона, которым подчиняется движение всех известных на то время планет Солнечной системы.
Первый закон Кеплера. Каждая планета движется по эллипсу, в одном из фокусов которого находится Солнце.
Второй закон Кеплера. Радиус – вектор планеты за равные промежутки времени «заметает» равные площади.
Третий закон Кеплера. Квадраты периодов обращений планет вокруг Солнца относятся как кубы больших полуосей их орбит.

Следует заметить, что орбиты планет Солнечной системы являются очень слабо вытянутыми эллипсами, то есть почти окружности. Однако в нашей Солнечной системе есть тела, движущиеся по вытянутым эллипсам, например, многие астероиды. Известно также, что орбитами периодических комет также являются очень сильно вытянутые эллипсы.
Мы знаем, что траекторий движения тела, брошенного под углом к горизонту, является парабола. Более точно это не парабола, а верхняя часть очень сильно вытянутого эллипса, в одном из фокусов которого находится центр Земли.
Дата добавления: 2018-04-05; просмотров: 232; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!