КИНЕМАТИЧЕСКИЙ АНАЛИЗ МЕХАНИЗМА
ФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ОБРАЗОВАНИЮ
ГОСУДАРСТВЕННОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ
ВЫСШЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ
ДОНСКОЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
Кафедра «Теория механизмов и машин»
СТРУКТУРНЫЙ, КИНЕМАТИЧЕСКИЙ И СИЛОВОЙ
АНАЛИЗ МЕХАНИЗМА
Методические указания к разделу курсовой работы
по ТММ для студентов дневного и заочного отделения
Ростов-на-Дону, 2007
Составитель: канд. техн. наук В.А.Кочетов
Структурный, кинематический и силовой анализ механизма
Методические указания к разделу курсовой работы по ТММ для студентов дневного и заочного обучения
/ДГТУ. Ростов-на-Дону, 2007….с.
© Донской государственный технический университет, 2007
Целью выполнения данного листа курсовой работы по ТММ является практическое закрепление знаний, полученных студентами, при изучении основных разделов курса – структурного, кинематического и силового анализа механизмов.
СТРУКТУРНЫЙ АНАЛИЗ МЕХАНИЗМА
Методы кинематического и силового анализа механизмов находятся в прямой зависимости от типа структурных групп, образующих механизм. Поэтому для выяснения методов кинематического и силового исследования механизмов и их последовательности необходимо предварительно провести структурный анализ механизма, который позволил бы установись класс механизма и последовательность присоединения структурных групп при его образовании.
|
|
|
1. Основные понятия и определения
Звено – одна или несколько деталей, не имеющих относительной подвижности.
Кинематическая пара – соединение двух соприкасающихся звеньев, обеспечивающее их относительную подвижность.
Существуют две классификации кинематических пар: по Артоболевскому и Рело.
Класс кинематической пары по Артоболевскому определяется количеством условий связи, накладываемых парой на относительную подвижность звеньев.
По Рело кинематические пары делятся на высшие и низшие.
Высшая кинематическая пара – это пара, в которой требуемое относительное движение звеньев может быть получено только соприкосновением её элементов по линии или в точке.
Низшая кинематическая пара – это пара, в которой требуемое относительное движение звеньев может быть получено только соприкосновением её элементов по поверхности.
Как правило, пары высшие являются парами 4-го класса по классификации Артоболевского, пары низшие – пары 5-го класса.
|
|
|

Кинематическая цепь – связанная система звеньев, образующих кинематические пары.
Механизм – кинематическая цепь, обладающая свойством определенности движения, то есть цепь, у которой при заданных законах движения входных звеньев остальные совершают вполне определенное движение. У механизма количество входных звеньев должно быть равно степени подвижности W, определяемой по формуле П.Л.Чебышева.
Всякий механизм состоит из одного или нескольких механизмов 1-го класса и присоединенных структурных групп.
Механизм 1-го класса – входное звено со стойкой. Существует два механизма 1-го класса: с вращательной и поступательной парой.


Механизм 1-го класса Механизм 1-го класса
с вращательной парой с поступательной парой
Структурная группа – кинематическая цепь, которая при соединении её свободными элементами кинематических пар к стойке имеет степень подвижности равную 0 (  ) и которая не может быть расчленена на более простые кинематические цепи с нулевой степенью подвижности.
) и которая не может быть расчленена на более простые кинематические цепи с нулевой степенью подвижности.
Структурные группы подразделяются на классы.
|
|
|
Класс группы определяется наивысшим классом контура, образуемого внутренними кинематическими парами группы.
Внутри класса группы подразделяются на порядки.
Порядок группы определяется количеством свободных элементов кинематических пар, которыми группа может быть присоединена к стойке или образованной уже цепи механизма.


Группа 2-го класса 2-го порядка Группа 3-го класса 3-го порядка
Класс механизма определяется наивысшим классом группы, входящей в механизм.
Структурная схема – это схема механизма, указывающая стойку, подвижные звенья, виды кинематических пар и их взаимное расположение.
Структурная схема строится без масштаба.
2. Условия перехода от кинематической схемы к структурной
При изображении структурной схемы на основании кинематической схемы механизма необходимо выполнять следующие требования:
1.Пассивные звенья, имеющиеся в механизме, должны быть отброшены и не учитываться при подсчете степени подвижности по формуле Чебышева, так и при изображении структурной схемы.
|
|
|
2.Сложные шарниры необходимо расчленить на простые, при этом надо учитывать, что в сложном шарнире содержится простых шарниров на единицу меньше пересекающихся в нём звеньев. За базовое звено необходимо принимать звено, образующее кинематическую пару со стойкой.
3.Высшие пары необходимо заменить низшими. Одна высшая пара заменяется звеном с двумя низшими парами.
4.Звенья, входящие в более, чем в две кинематические пары, должны изображаться соответствующими контурами (например, звено, входящее в три пары, на схеме изображается треугольником и т.п.).
5.Допускается замена поступательных пар на вращательные.
6.Нумерация звеньев на кинематической и структурной схемах должна быть одинаковой. При этом звенья, появляющиеся в результате замен высших пар низшими, нумеруются с дополнительной индексацией (например,  ,
,  и т.п.)
и т.п.)
3. Последовательность структурного анализа
1.Дается наименование звеньев механизма.
2. Выделяются кинематические пары и устанавливается их класс по классификации Артоболевского и Рело.
3.Определяется степень подвижности по формуле П.Л.Чебышева иустанавливается, является ли исследуемая кинематическая цепь действительно механизмом.
4.Вычерчивается структурная схема механизма.
5.Выделяются структурные группы и устанавливается их класс и порядок (для групп 2-го класса определяется также и вид ).
6.Устанавливается класс всего механизма и записывается формула его строения.
4. Пример структурного анализа механизма

1. Наименование звеньев:
1–кулачок, 2-ролик (пассивное звено), 3-толкатель, 4-шатун, 5-ползун, 0-стойка
2. Классификация кинематических пар
Освобождаемся от пассивного звена 2, тогда толкатель 3 будет контактировать по теоретическому профилю (на схеме контактирующий конец изображен стрелкой).
| Изображение кинематической пары на схеме | 
| 
| 
| 
| 
| 
|
| Класс пары по Артоболевскому | 5 | 4 | 5 | 5 | 5 | 5 |
| Класс пары по Рело | низшая | высшая | низшая | низшая | низшая | низшая |
3. Степень подвижности по формуле П.Л.Чебышева

 - число подвижных звеньев (звено 2 не учитывается),
- число подвижных звеньев (звено 2 не учитывается),
 - пары 5-го класса,
- пары 5-го класса,
 - пары 4-го класса.
- пары 4-го класса.
Следовательно, исследуемая кинематическая цепь является механизмом при одном ведущем звене.
4. Структурная схема механизма
Заменяем высшую пару низшими (см. кинематическую схему), появляющееся в результате замены дополнительное звено обозначаем  , звено3 на схеме должно быть изображено треугольником.
, звено3 на схеме должно быть изображено треугольником.

Следовательно, исследуемый механизм является механизмом 2-го класса.
5. Формула строения механизма
 .
.
КИНЕМАТИЧЕСКИЙ АНАЛИЗ МЕХАНИЗМА
Кинематический анализ механизма проводится графоаналитическим методом, то есть с помощью планов скоростей и ускорений, строящихся для различных положений механизма.
Основными задачами кинематического анализа являются:
1.Построение планов положений механизма.
2.Построение планов скоростей и ускорений для различных положений механизма и определение по ним абсолютных скоростей и ускорений шарнирных точек и центров масс звеньев.
3.Определение величин и направлений угловых скоростей (  ) и угловых ускорений (
) и угловых ускорений (  ) звеньев.
) звеньев.
1. Построение планов положений механизма
Планы положений механизма представляют собой совокупность кинематических схем механизма, построенных для различных положений входного звена.
При кинематическом исследовании принято строить положения для равностоящих друг от друга по времени положений входного звена, количество которых обычно принимается равным 12. Планы положений строят методом засечек в чертежном стандартном масштабе  .
.
Построение планов положений начинается с построения крайних положений механизма, одно из которых (обычно соответствующее началу рабочего хода механизма) принимается за базовое (нулевое) положение. От нулевого положения начинается разбиение траектории входногозвена на равноотстоящие положения и затем построение механизма для каждого положения входногозвена.
В основе всех механизмов, предусмотренных заданиями для данной курсовой работы, лежат три следующих типа механизма: кривошипно-ползунный, кривошипно-коромысловый и кривошипно-кулисный.
Рассмотрим определение крайних положений для всех трех выше перечисленных типов механизмов.
а) Крайнимиположениями для кривошипно-ползунного механизма являются положения, при которых шатун и кривошип лежат на одной прямой (см. рис.1). Для определения крайних положений ползуна В при заданных размерах шатуна и кривошипа и расстояния е (для аксиальных механизмов е=0) необходимо из центра вращения кривошипа О на прямой, по которой движется ползун, сделать две засечки радиусами

б) Для кривошипно-коромыслового механизма крайние положения определяется аналогично, как и для кривошипно-ползунного механизма. Разница заключается лишь в том, что траектория точки В будет дугой окружности (рис.2).
в) Для кривошипно-кулисного механизма с качающейся кулисой крайние положения будут тогда, когда кривошип и кулиса образуют между собой прямой угол (рис.3), то есть крайние положения кулисы ВС будут касательными к траектории точки А. поэтому при заданных размерах кулисы, кривошипа и расстояния  . Для построения крайних положений механизма проводится окружность из точки О радиусом, равным
. Для построения крайних положений механизма проводится окружность из точки О радиусом, равным  , из точки В проводятся касательные к окружности кривошипа, которые и являются крайними положениями кулисы ВС.
, из точки В проводятся касательные к окружности кривошипа, которые и являются крайними положениями кулисы ВС.
Обычно для кулисных механизмов задается коэффициент неравномерности скорости хода, представляющий собой отношение угла поворота кривошипа при рабочем ходе к углу поворота при холостом ходе:

Определив угол  , можно рассчитать длину кривошипа
, можно рассчитать длину кривошипа

и затем построить крайние положения механизма.
2. Построение планов скоростей и ускорений
План скоростей(ускорений) представляет собой графическое изображение абсолютных скоростей (ускорений) точек звеньев механизма, имеющее общее начало, называемое полюсом плана.
Метод планов скоростей (ускорений) основан на известных теоремах теоретической механики, согласно которым плоское движение твердого тела (звена) можно представить как сложное, состоящее из двух движений: переносного и относительного.
Метод планов скоростей и ускорений применим только для механизмов 2-го класса, т.е. механизмов, включающих в себя только двухподковые группы 2-го класса.
Для успешного решения задач, связанных с построением планов скоростей и ускорений, необходимо знать основные свойства планов скоростей(ускорений):
1.Фигура, образованная планом относительных скоростей, подобна очертанию звена сходственно с ним расположена и повернута по отношению к звену на угол 900 в сторону мгновенного его вращения.
2.Фигура, образованная планом относительных ускорений, подобна очертанию звена, сходственно с ним расположена и повернута по отношению к звену на угол 1800 -  в сторону его мгновенного углового ускорения, где - угол между полным и нормальным относительными ускорениями.
в сторону его мгновенного углового ускорения, где - угол между полным и нормальным относительными ускорениями.
3.Векторы, исходящие из полюса плана, изображают абсолютные скорости (ускорения) точек звена.
4.Векторы, соединяющие концы векторов абсолютных скоростей (ускорений), изображают относительные скорости (ускорения) точек звеньев, причем, например, скорость точки В относительно А на плане изображается вектором, направленным на плане от точки а к точке b
5.План скоростей позволяет определить величину и направление угловой скорости по выражению  ,
,
где  - относительная скорость двух точек звена,
- относительная скорость двух точек звена,
 - расстояние между точками.
- расстояние между точками.

Рис. 1

Рис. 2

Рис. 3
6.План ускорений позволяет определить величину и направление углового ускорения по выражению  ,
,
где  - тангенциальная составляющая полного относительного ускорения двх точек звена,
- тангенциальная составляющая полного относительного ускорения двх точек звена,  - расстояние между точками.
- расстояние между точками.
Кроме того, необходимо знать, что:
1.Относительная скорость при вращательном движении звена всегда направлена перпендикулярно к звену в сторону его угловой скорости.
2.Относительная скорость (ускорение) при поступательном движении одного звена относительно другого направлена всегда по направлению движения, т.е. параллельно направляющей
3.Нормальное ускорение всегда направлено по звену к центру вращения, например,  направлено по звену АВ от точки В к точке А, величина его равна
направлено по звену АВ от точки В к точке А, величина его равна  .
.
4.Тангенциальное ускорение всегда перпендикулярно к нормальному и, следовательно, для звена, совершающего вращательное или плоскопараллельное движение перпендикулярно к звену, величина его равна  . Для звена, совершающего поступательное движение относительно неподвижной направляющей
. Для звена, совершающего поступательное движение относительно неподвижной направляющей  параллельно направляющей,
параллельно направляющей,  .
.
5.Если звено совершает сложное движение, состоящее из переносного вращательного и относительного поступательного движений, то возникает кориолисово ускорение, величина которого определяется выражением
 ,
,
где  - относительная поступательная скорость,
- относительная поступательная скорость,
 - угловая переносная скорость.
- угловая переносная скорость.
6.Направление кориолисова ускорения определяется поворотом вектора относительной скорости на 900 в сторону .
3. Последовательность построения планов скоростей (ускорений)
Последовательность построения планов скоростей (ускорений) указывает формула строения механизма, получаемая в результате структурного анализа. Эта последовательность должна быть следующей:
1.Строится план скоростей (ускорений) механизма 1-го класса, после чего становится известной скорость (ускорение) концевого элемента кинематической пары группы, присоединенной к механизму 1-го класса.
2.Строится план скоростей (ускорений) 1-ой присоединенной группы: 1-ой присоединенной группой следует считать ту, которая одним поводком присоединяется к механизму 1-го класса, вторым к стойке; если таких групп несколько, то они равноценны и построение можно вести для любой из них. Для построения плана составляются уравнения для средней кинематической пары относительно концевых элементов, скорости (ускорения) которых известны, и решаются графически.
3.Строятся план скоростей (ускорений) для остальных групп механизма в порядке их присоединения, причем задача, как и в предыдущем пункте, сводится к определению скорости (ускорения) средней кинематической пары относительно известных концевых элементов.
4.Пример кинематического анализа
Построить план скоростей и ускорений механизма, представленного на рис.4 в заданном положении, определить абсолютные скорости и ускорения шарнирных точек, ускорения центров масс звеньев, угловые скорости и ускорения звеньев.
Дано:  ,
,  ,
,  ,
,  ,
,  ,
,  , центры масс звеньев находятся посредине.
, центры масс звеньев находятся посредине.
Структурный анализ механизма
а) Наименование звеньев:
0-стойка, 1-кривошип, 2-шатун-камень, 3-коромысло-кулиса, 4-шатун, 5-ползун.
б) Классификация кинематических пар
| Изображение пары на кинематической схеме | 
| 
| 
| 
| 
| 
| 
|
| Класс пары по Артоболевскому | 5 | 5 | 5 | 5 | 5 | 5 | 5 |
| Класс пары по Рело | низшая | низшая | низшая | низшая | низшая | низшая | низшая |
в) Степень подвижности по формуле П.Л.Чебышева
 ;
;
г) Структурная схема механизма

д) Формула строения механизма

Построение плана скоростей
Построение плана скоростей механизма 1-го класса
Определяем скорость точки В
 .
.
Из произвольной точки  , принятой за полюс плана, проводим вектор
, принятой за полюс плана, проводим вектор  , перпендикулярный звену АВ. Длина его может быть выбрана произвольной, однако для получения «удобного» масштаба плана принимаем его
, перпендикулярный звену АВ. Длина его может быть выбрана произвольной, однако для получения «удобного» масштаба плана принимаем его  .
.
Определяем масштаб плана скоростей
 .
.
Вектор является планом скоростей механизма 1-го класса.
Построение плана скоростей первой присоединенной группы (звенья 2,3)
Для этой группы известны скорости концевых элементов: точки В и точки С3 (С0). Необходимо определить скорость элемента средней пары – точки С2, которая в данный момент совпадает с точкой С3 (С0) (см. рис.4).
Составляем векторные уравнения для определения скорости точки  относительно точки В и
относительно точки В и 
 ,
,
 .
.
где  - абсолютная скорость точки ;
- абсолютная скорость точки ;
 - абсолютная скорость точки
- абсолютная скорость точки  , известная по величине и направлению (подчеркнута двумя чертами);
, известная по величине и направлению (подчеркнута двумя чертами);
 - относительная скорость точки по отношению к , она
- относительная скорость точки по отношению к , она  , т.к. это скорость во вращательном движении точки
, т.к. это скорость во вращательном движении точки  относительно (известна по линии действия – подчеркнута одной чертой);
относительно (известна по линии действия – подчеркнута одной чертой);
 - абсолютная скорость точки , совпадающая со скоростью точки
- абсолютная скорость точки , совпадающая со скоростью точки  ;
;
 - относительная скорость точки относительно
- относительная скорость точки относительно  в поступательном движении и следовательно направлена
в поступательном движении и следовательно направлена  звену
звену  .
.
Решаем эту векторную систему графически, для чего из точки В на плане проводим линию действия вектора  , а из точки , расположенной в полюсе, проводим линию вектора
, а из точки , расположенной в полюсе, проводим линию вектора  , точку пересечения их соединяем с полюсом. Вектор
, точку пересечения их соединяем с полюсом. Вектор  - есть вектор абсолютной скорости точки ,
- есть вектор абсолютной скорости точки ,  - вектор относительной скорости точки , он же является планом скоростей части звена 2 от точки В до точки .
- вектор относительной скорости точки , он же является планом скоростей части звена 2 от точки В до точки .
Скорость точки D, принадлежащей звену 2 и лежащей на его продолжении за точкой , находим, используя свойство подобия плана скоростей. Составляем пропорцию для нахождения положения точки d на плане
 ,
,
где BD и  - линейные размеры, которые берутся прямо из схемы механизма, мм;
- линейные размеры, которые берутся прямо из схемы механизма, мм;
- отрезок берется из плана скоростей, мм
Определив отрезок  , откладываем его на плане, точка d будет лежать за точкой также, как и на звене. Вектор
, откладываем его на плане, точка d будет лежать за точкой также, как и на звене. Вектор  - вектор абсолютной скорости точки D.
- вектор абсолютной скорости точки D.
Построение плана скоростей 2-ой присоединенной группы (звенья 4-5)
После определения скорости точки D для этой группы известны скорости концевых элементов: точки D и точки Е0, принадлежащей станине и совпадающей в данный момент с шарнирной точкой Е, которая является средней кинематической парой данной группы.
Составляем векторные уравнения для скорости точки Е относительно концевых элементов группы
 ,
,
 .
.
где  - абсолютная скорость точки Е45;
- абсолютная скорость точки Е45;
 - абсолютная скорость точки D3,4 (на плане вектор );
- абсолютная скорость точки D3,4 (на плане вектор );
 - относительная скорость точки
- относительная скорость точки  относительно
относительно  ,
,  к
к 
 - абсолютная скорость точки
- абсолютная скорость точки  ;
;
 - относительная скорость точки относительно направляющей, по которой движется ползун 5.
- относительная скорость точки относительно направляющей, по которой движется ползун 5.
Решаем данную систему графически. Из точки d на плане проводим линию вектора  к DE, а из точки е0, расположенной в полюсе, проводим линию вектора
к DE, а из точки е0, расположенной в полюсе, проводим линию вектора  направляющей, т.е. вертикально. Вектор
направляющей, т.е. вертикально. Вектор  есть вектор абсолютной скорости точки Е.
есть вектор абсолютной скорости точки Е.
4.Определяем скорости центров масс и угловые скорости звеньев.
Так как центры масс лежат посредине звеньев, то на плане точки центров масс будут также лежать посредине соответствующих отрезков. Абсолютные скорости центров масс будут равны.
 ;
;
 ;
;
 .
.
Совершенно аналогично определяются истинные значения абсолютных скоростей шарнирных точек механизма.
Угловые скорости звеньев будут равны
 ;
;
 .
.
Для определения направления угловой скорости  на план механизма переносим вектор относительной скорости
на план механизма переносим вектор относительной скорости  в точку D (на плане скоростей этот вектор направлен от точки b к точке d) и смотрим, куда он вращает точку D относительно В. В данном случае против часовой стрелки.
в точку D (на плане скоростей этот вектор направлен от точки b к точке d) и смотрим, куда он вращает точку D относительно В. В данном случае против часовой стрелки.
Аналогично определяем направление  .
.
Построение плана ускорений
Определяем ускорение точки В, которое будет состоять только из нормальной составляющей, так как 

Из произвольной точки Ра, принятой за полюс плана, проводим вектор  =61,6мм параллельно звену АВ и направленный от точки В к А.
=61,6мм параллельно звену АВ и направленный от точки В к А.
Определяем масштаб плана ускорений

Вектор является планом ускорений механизма 1-го класса.
Построение плана ускорений группы звеньев 2-3
Составляем векторные уравнения для определения ускорения точки С2 относительно точек А и С3
 ;
;

где  - абсолютное ускорение точки С2;
- абсолютное ускорение точки С2;
 - нормальное ускорение точки С2 относительно В, оно направлено по звену 2 от точки С2 к точке В, величину его определяем, используя план скоростей
- нормальное ускорение точки С2 относительно В, оно направлено по звену 2 от точки С2 к точке В, величину его определяем, используя план скоростей

или в масштабе  отрезок на плане ускорений
отрезок на плане ускорений
 ,
,
где  - отрезок из плана скоростей;
- отрезок из плана скоростей;
 - тангенциальная составляющая ускорения точки С2 относительно В, линия действия его перпендикулярна
- тангенциальная составляющая ускорения точки С2 относительно В, линия действия его перпендикулярна  или к звену 2;
или к звену 2;
 = 0 – абсолютное ускорение точки С3,0;
= 0 – абсолютное ускорение точки С3,0;
 - кориолисово ускорение точки С2 относительно С3, величина его равна
- кориолисово ускорение точки С2 относительно С3, величина его равна

 – отрезок из плана скоростей, или в масштабе отрезок на плане ускорений
– отрезок из плана скоростей, или в масштабе отрезок на плане ускорений 
Направление его определяем согласно существующему правилу, поворачиваем вектор относительной скорости относительно точки С3,0 в сторону  (в данном случае против часовой стрелки) на 900 (см. рис.4).
(в данном случае против часовой стрелки) на 900 (см. рис.4).
 - относительное ускорение точки С2 относительно С3,0 направлено звену 2.
- относительное ускорение точки С2 относительно С3,0 направлено звену 2.
Решаем систему векторных уравнений графически.
Из точки b на плане проводим вектор  и направленный от точки С2 к В, из точки
и направленный от точки С2 к В, из точки  проводим линию действия тангенциального ускорения к вектору
проводим линию действия тангенциального ускорения к вектору  . Переходим теперь к решению второго векторного уравнения системы, из точки С3,0, которая расположена в полюсе, проводим вектор
. Переходим теперь к решению второго векторного уравнения системы, из точки С3,0, которая расположена в полюсе, проводим вектор  , направление и величина которого определены выше. Из точки k проводим линию действия относительного ускорения, которая будет перпендикулярна к вектору
, направление и величина которого определены выше. Из точки k проводим линию действия относительного ускорения, которая будет перпендикулярна к вектору  . Точку пересечения линий тангенциального ускорения и относительного
. Точку пересечения линий тангенциального ускорения и относительного  соединяем с полюсом. Вектор
соединяем с полюсом. Вектор  - есть абсолютное ускорение точки С2.
- есть абсолютное ускорение точки С2.
Положение точки D на плане находим из пропорции

3. Строим план ускорений группы звеньев 4-5
Составляем векторные уравнения для точки Е относительно точек Е0 и D
 ;
;
 ,
,
где  - абсолютное ускорение точки Е;
- абсолютное ускорение точки Е;
 - абсолютное ускорение точки D (вектор
- абсолютное ускорение точки D (вектор  на плане);
на плане);
 - нормальное ускорение точки Е относительно D, направленное по звену ЕD от точки Е к точке D. Величина его равна
- нормальное ускорение точки Е относительно D, направленное по звену ЕD от точки Е к точке D. Величина его равна
 ,
,
 - тангенциальное ускорение точки Е относительно D, направлено
- тангенциальное ускорение точки Е относительно D, направлено  ;
;
 = 0 – абсолютное ускорение точки Е0;
= 0 – абсолютное ускорение точки Е0;
 = 0 – кориолисово ускорение точки Е относительно Е0, равно нулю, потому что направляющая неподвижна;
= 0 – кориолисово ускорение точки Е относительно Е0, равно нулю, потому что направляющая неподвижна;
 - относительное ускорение точки Е относительно Е0, направлено по движению ползуна 5.
- относительное ускорение точки Е относительно Е0, направлено по движению ползуна 5.
Решаем векторные уравнения графически.
Из точки d проводим вектор нормального ускорения  , длина которого равна
, длина которого равна  . Из точки С0, находящейся в полюсе, проводим линию действия по направлению движения ползуна Е. Точка пересечения и есть точка е, вектор
. Из точки С0, находящейся в полюсе, проводим линию действия по направлению движения ползуна Е. Точка пересечения и есть точка е, вектор  - абсолютное ускорение точки Е.
- абсолютное ускорение точки Е.
4.Определяем ускорения центров масс и угловые ускорения звеньев.
Соединяем середины отрезков , и  с полюсом, тогда векторы
с полюсом, тогда векторы  ,
,  и
и  будут абсолютными ускорениями центров масс звеньев, истинные значения ускорений получаем, умножив длины этих векторов на масштаб
будут абсолютными ускорениями центров масс звеньев, истинные значения ускорений получаем, умножив длины этих векторов на масштаб
 ;
;
 ;
;
 ;
;
 .
.
Аналогично определяются истинные значения абсолютных ускорений шарнирных точек механизма.
Угловые ускорения звеньев будут равны
 ;
;
 .
.
Для определения направления углового ускорения на план механизма переносим вектор тангенциального ускорения  в точку С2 (на плане ускорений это
в точку С2 (на плане ускорений это  , направленный от точки к точке с2) и смотрим, куда он вращает точку С2 относительно В. В данном случае против часовой стрелки.
, направленный от точки к точке с2) и смотрим, куда он вращает точку С2 относительно В. В данном случае против часовой стрелки.
Аналогично определяется направление  .
.
СИЛОВОЙ АНАЛИЗ МЕХАНИЗМА
Целью силового анализа является исследование движения механизма с учетом сил, действующих на его звенья.
Задачами силового анализа являются:
1. Определение сил, действующих на звенья механизма.
2. Определение реакций в кинематических парах.
3. Определение уравновешивающей силы (момента), приложенной к ведущему звену.
Силовой анализ механизма основан на известном из теоретической механики принципе Даламбера. Суть этого принципа применительно к задачам силового анализа сводится к тому, что если к звену механизма помимо реальных сил приложить фиктивные силы инерции, то его можно рассматривать условно находящимся в равновесии и для определении неизвестных параметров реакций в кинематических парах можно использовать уравнения статики. Поэтому этот метод силового анализа называется методом кинетостатики.
1. Силы инерции звеньев механизмов
Из теоретической механики известно, что в общем случае плоского движения распределенные по всему звену элементарные силы инерции можно привести к равнодействующей  и к паре сил с моментом
и к паре сил с моментом  .
.
Значение силы инерции звена определяется по формуле
 ,
,
где m – масса звена;
 - ускорение центра масс звена.
- ускорение центра масс звена.
Момент пары сил инерции относительно оси, проходящей через его центр масс равен
 ,
,
где  - момент инерции звена относительно центра масс;
- момент инерции звена относительно центра масс;
- угловое ускорение звена.
Знак минус в формулах показывает, что сила Pu направлена противоположно ускорению , момент  - противоположно угловому ускорению звена.
- противоположно угловому ускорению звена.
Наличие Pu, или одновременно обоих зависит от характера движения звена. Рассмотрим основные виды движения звеньев: поступательное, плоскопараллельное, вращательное.
1. Звено совершает поступательное движение:

 .
.
2. Звено совершает плоскопараллельное движение:

 .
.
3. Звено совершает вращательное движение:
а) 
;
б) Если звено вращается с постоянной угловой скоростью, то 

 .
.
Ускорения центров масс и угловые ускорения определяются по плану ускорений.
Для проведения силового анализа кинематическая цепь должна быть статически определимой.
Статически определимой считается цепь, у которой число известных параметров реакций равно количеству уравнений статики, которые можно составить для их определения.
Каждая реакция характеризуется 3-мя параметрами: величиной, направлением и точкой приложения.
Кинематические пары 5-го класса имеют два неизвестных параметра реакции:
вращательная пара:

не известны: величина и направление;
известна: точка приложения (центр шарнира);
поступательная пара:

не известны: величина и точка приложения;
известно: направление (перпендикулярно к направляющей).
Условие статической неопределимости плоской кинематической цепи выражается уравнением
 .
.
Это условие совпадает с условием существования структурной группы, поэтому структурные группы являются статически определимыми цепями.
Отдельное звено и весь механизм в целом являются статически неопределимыми. Статическая неопределимость в механизм вносится механизмом 1-го класса.
Для того, чтобы механизм 1-го класса стал статически определимым, к нему необходимо приложить уравновешивающую силу или уравновешивающий момент.
Уравновешивающая сила (момент) – это реальная сила (момент), приложенная со стороны двигателя, и которая уравновешивает все силы, действующие на звенья, включая силы инерции и моменты пар сил инерции.
Точка приложения и направление уравновешивающей силы (момента) всегда известны и определяются конструкцией передаточного механизма, используемого для передачи движения от двигателя к ведущему звену (в курсовой работе принять направление  перпендикулярно кривошипу).
перпендикулярно кривошипу).
Уравновешивающая сила (момент) определяется в результате силового анализа механизма 1-го класса.
Уравновешивающую силу (момент) можно определить с помощью метода Жуковского (этот метод изложен дальше).
2. Последовательность проведения силового анализа
1. Выбирается положение для исследования и строится для него план скоростей и план ускорений.
2. Определяются силы инерции и моменты пар сил инерции звеньев.
3. Определяется сила сопротивления, действующая на рабочее звено механизма по диаграмме сил сопротивления.
4. Проводится силовой расчет групп и определяются реакции в кинематических парах (силовой анализ начинается с наиболее удаленной группы от ведущего звена и проводится в порядке обратном формуле строения механизма).
5. Проводится силовой анализ механизма 1-го класса и определяется уравновешивающая сила или уравновешивающий момент.
6. Определяется уравновешивающая сила или уравновешивающий момент по методу Н.Е.Жуковского.
7. Определяется погрешность расчета уравновешивающей силы или уравновешивающего момента обоими методами, при этом метод Жуковского принимается как более точный.
Пример: Силовой анализ проведен на примере механизма, для которого проводился кинематический анализ (рис.4).
Исходные данные: Сила сопротивления, действующая на ползун 5  (в заданиях на курсовой проект она определяется по диаграмме сил сопротивления). Веса звеньев:
(в заданиях на курсовой проект она определяется по диаграмме сил сопротивления). Веса звеньев:  ,
,  ,
,  ,
,  . Моменты инерции:
. Моменты инерции:  ,
,  .
.
1. Определяем силы инерции и моменты пар сил инерции звеньев
 ;
;

 ;
;
 ;
;
 ;
;
 ;
;
 .
.
Значения  и
и  см. стр.15.
см. стр.15.
2. Силовой анализ группы звеньев 4-5


Рис.5
Прикладываем все реальные силы, действующие на звенья группы (веса, силу сопротивления), силы инерции и моменты пар сил инерции (  и
и  - направлены противоположно ускорениям центров масс,
- направлены противоположно ускорениям центров масс,  - противоположно ), силы реакции со стороны отброшенных частей механизма: реакция
- противоположно ), силы реакции со стороны отброшенных частей механизма: реакция  - со стороны стойки на звено 5,
- со стороны стойки на звено 5,  - реакция со стороны звена 2 на звено 4. Так как направление неизвестно, раскладываем её на две составляющие:
- реакция со стороны звена 2 на звено 4. Так как направление неизвестно, раскладываем её на две составляющие:  - нормальную, направленную по звену и
- нормальную, направленную по звену и  - тангенциальную, направленную перпендикулярно к звену. Направление и выбираем произвольно.
- тангенциальную, направленную перпендикулярно к звену. Направление и выбираем произвольно.
Рассматриваем равновесие звена 4 и составляем уравнение моментов относительно точки Е
 ,
,
 .
.
Так как получилась со знаком (+), то предварительно выбранное направление является истинным.
В уравнении  - масштаб схемы механизма вводится в том случае, если плечи сил берутся в миллиметрах непосредственно из чертежа, а момент пар сил инерции в ньютонометрах .
- масштаб схемы механизма вводится в том случае, если плечи сил берутся в миллиметрах непосредственно из чертежа, а момент пар сил инерции в ньютонометрах .
Рассматриваем равновесие группы в целом и составляем уравнение сил, действующих на группу.
 .
.
В уравнении все силы инерции известны, кроме  и
и  , которые известны лишь по направлению. Их можно определить, если решить это уравнение графически, то есть построить план сил. Выбираем масштаб плана сил
, которые известны лишь по направлению. Их можно определить, если решить это уравнение графически, то есть построить план сил. Выбираем масштаб плана сил  и проводи линию действия параллельно звену 4. Из произвольной точки этой линии проводим вектор
и проводи линию действия параллельно звену 4. Из произвольной точки этой линии проводим вектор  , из его конца
, из его конца  и т.д. в последовательности, в которой записаны силы в уравнении. Из конца вектора
и т.д. в последовательности, в которой записаны силы в уравнении. Из конца вектора  проводим линию действия вектора до пересечения с линией действия вектора . Точка их пересечения определяет величину каждой из них.
проводим линию действия вектора до пересечения с линией действия вектора . Точка их пересечения определяет величину каждой из них.
Направление должно быть таким, чтобы все векторы на плане следовали один за другим, то есть стрелки не должны встречаться. Суммируя графически и , находим вектор  . Величины определенных сил равны
. Величины определенных сил равны
 ;
;
 .
.
Для определения реакций в шарнире Е (  ) рассматриваем равновесие звена 4
) рассматриваем равновесие звена 4

Если построить план сил, то можно найти  . Однако, следует отметить, что если уравнение равновесия группы составлять так, что сначала записывать силы, действующие на одно звено, а затем на другое, то дополнительного плана сил строить не надо, можно использовать уже построенный план для группы в целом. На этом плане необходимо конец вектора
. Однако, следует отметить, что если уравнение равновесия группы составлять так, что сначала записывать силы, действующие на одно звено, а затем на другое, то дополнительного плана сил строить не надо, можно использовать уже построенный план для группы в целом. На этом плане необходимо конец вектора  соединить с началом вектора и получим вектор (см. рис.4,5).
соединить с началом вектора и получим вектор (см. рис.4,5).
Величина его равна
 .
.
3.Силовой анализ группы звеньев 2-3
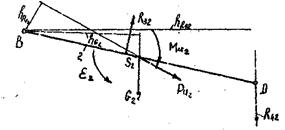
Рис.6
Рассматриваем равновесие звена 2 и составляем сумму моментов сил относительно точки В, при этом учитываем, что реакция  будет звену BD. Направление её выбираем произвольно (рис.4,6)
будет звену BD. Направление её выбираем произвольно (рис.4,6)
 ;
;
 .
.
Рассматриваем равновесие звена 3, на которое действуют только реакции со стороны звена 2 и стойки 0.
 |
 ,
, 
Для определения реакции  рассматриваем равновесие группы и составляем уравнение сил, действующих на неё
рассматриваем равновесие группы и составляем уравнение сил, действующих на неё
 .
.

Рис.7
Принимаем масштаб  и строим план сил по этому уравнению (см. рис.4,7). Величина реакции будет равна
и строим план сил по этому уравнению (см. рис.4,7). Величина реакции будет равна
 .
.
4. Силовой анализ механизма 1-го класса.
На механизм 1-го класса помимо реакции , веса  , и силы инерции
, и силы инерции  будет действовать уравновешивающая сила
будет действовать уравновешивающая сила  , которую условно прикладываем в шарнире 5 перпендикулярно кривошипу AB (см. рис.4,8),
, которую условно прикладываем в шарнире 5 перпендикулярно кривошипу AB (см. рис.4,8),

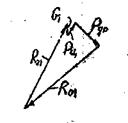
Рис.8
Для определения составляем сумму моментов сил относительно точки А
 ;
;
 .
.
Для определения реакции в шарнире А рассматриваем равновесие звена 1.
 .
.
Принимаем масштаб и строим план сил по этому уравнению (рис.4,8). Величина реакции будет равна
 .
.
3. Определение уравновешивающей силы по методу Н.Е.Жуковского
Для определения по методу н.Е.Жуковского необходимо план скоростей повернуть на угол 900 и в соответствующих точках плана приложить все силы, действующие на механизм, включая силы инерции, моменты пар сил инерции и уравновешивающую сил. Затем составить уравнение моментов всех сил относительно полюса плана. В этом уравнении единственной неизвестной является уравновешивающая сила, которая и определяется из этого уравнения.
Следует знать, что моменты пар сил инерции, прикладываемые на плане скоростей относительно точек центров масс, могут либо оставаться по направлению такими же, как и на механизме, либо иметь противоположное направление. Если направление расположения букв на плане скоростей звена и на звене одинаков, то момент не изменяет направления (например, на рис.4 для звена BD и его плана расположение букв b и d одинаково, то же и для звена ED). Если расположение букв на звене и на плане противоположно, то момент должен изменить знак на противоположный.
Если моменты пар сил инерции определены в ньютонометрах, а плечи сил на плане берутся в миллиметрах, то их надо пересчитать
 ;
;
 ,
,
где и  - отрезки, взятые из повернутого плана скоростей, мм;
- отрезки, взятые из повернутого плана скоростей, мм;
 и
и  - истинные размеры звеньев, м.
- истинные размеры звеньев, м.
Составляем уравнение моментов относительно полюса плана скоростей и находим :

 Определяем погрешность расчета по планам сил и методу Н.Е.Жуковского
Определяем погрешность расчета по планам сил и методу Н.Е.Жуковского
 .
.
4.Последовательность силового анализа групп 2-го класса
1. Группа 1-го класса
Реакции в шарнирах B и D раскладываем на нормальные и тангенциальные:

а) определяется реакция  из условия равновесия звена 2
из условия равновесия звена 2
 ;
;
б) определяется реакция  из условия равновесия звена 3
из условия равновесия звена 3
 ;
;
в) определяются реакции  ,
,  ,
,  и
и  из условия равновесия группы
из условия равновесия группы
 .
.
Строится план сил по уравнению и определяются искомые реакции.
г) определяется реакция в шарнире С (  ) из условия равновесия либо звена 2, либо3.
) из условия равновесия либо звена 2, либо3.
 .
.
2. Группа 2-го вида

а) определяется реакция из условия равновесия звена 2
 ;
;
б) определяются реакции ,  и из условия равновесия группы
и из условия равновесия группы
 .
.
Строится план сил по уравнению и находятся искомые реакции (сила сопротивления  может отсутствовать, если звено 3 не является рабочим звеном).
может отсутствовать, если звено 3 не является рабочим звеном).
в) определяется реакция в шарнире В ( ) из условия равновесия либо звена 2, либо 3
 ;
;
г) определяется плечо реакции из условия равновесия звена 3
 .
.
3.Группа 3-го вида
 |
Поскольку в заданиях на курсовой проект отсутствует вес камня 2, то последовательность расчета проводится именно для этого частного случая:
а) рассматриваем равновесие звена 2

 ,
,
так как  к звену 3, то тоже перпендикулярна звену 3.
к звену 3, то тоже перпендикулярна звену 3.
б) определяется реакция из условия равновесия группы
 ,
,
реакция  должна быть определена раньше из расчета группы, присоединенной к данной группе.
должна быть определена раньше из расчета группы, присоединенной к данной группе.
в) определяется реакция  (в шарнире В) из условия равновесия группы
(в шарнире В) из условия равновесия группы
 .
.
 |
4. Группа 4-го вида
Весом камня 4 пренебрегаем. Реакция  к звену 3, а реакция
к звену 3, а реакция  к направляющей. Сила сопротивления
к направляющей. Сила сопротивления  может отсутствовать, если звено 5 не является рабочим.
может отсутствовать, если звено 5 не является рабочим.
а) определяются реакции  и из условия равновесия группы
и из условия равновесия группы
 .
.
Строится план сил и находятся искомые реакции.
б) определяется реакция в шарнире В (  ) из условия равновесия одного из звеньев, т.к.
) из условия равновесия одного из звеньев, т.к.  , то
, то
 ;
;  ;
;
в) определяются плечи реакций и из условия равновесия звеньев 4 и5;
для звена 4  ;
;
для звена 5  .
.
5. Группа 5-го вида
|
|

Весом звена 4 пренебрегаем. Реакция  направляющей звена 4.
направляющей звена 4.
а) рассматриваем равновесие звена 4
 ;
;  ;
;
отсюда следует, что  к направляющей звена 4.
к направляющей звена 4.
б) определяются реакции и из условия равновесия группы
Строится план сил и находятся искомые реакции ( - сила сопротивления может отсутствовать, если звено 5 не является рабочим)
в) определяется плечо реакции из условия равновесия звена 5
 .
.
Литература
- И.И.Артоболевский. Теория механизмов и машин. М., Наука, 1996.
- Теория механизмов и механика машин. Учебник для втузов /под ред. К.В.Фролова/ - М., Высшая школа, 2001.
- А.С.Кореняко и др. курсовое проектирование по теории механизмов и машин. ООО. Медиастар, 2006
СОДЕРЖАНИЕ
| стр. | |
| Структурный анализ механизма………………………………………………………. | 3 |
| 1.Основные понятия и определения……………………………………………………… | 3 |
| 2.Условия перехода от кинематической схемы к структурной………………………… | 4 |
| 3.Последовательность структурного анализа……………………………………………. | 5 |
| 4.Пример структурного анализа механизма……………………………………………... | 5 |
| Кинематический анализ механизма................................................................................ | 6 |
| 1.Построение планов положений механизма……………………………………………. | 6 |
| 2.Построение планов скоростей и ускорений…………………………………………… | 7 |
| 3.Последовательность построения планов скоростей (ускорений)……………………. | 9 |
| 4.Пример кинематического анализа……………………………………………………… | 10 |
| Силовой анализ механизма……………………………………………………………... | 15 |
| 1.Силы инерции звеньев механизмов……………………………………………………. | 15 |
| 2.Последовательность проведения силового анализа…………………………………... | 17 |
| 3.Определение уравновешивающей силы по методу Н.Е.Жуковского………………………………………………………………………….. | 22 |
| 4.Последовательность силового анализа групп 2-го класса……………………………. | 23 |
| 5.Литература………………………………………………………………………………... | 26 |
Дата добавления: 2018-04-05; просмотров: 918; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!