Выбор интегрального линейного стабилизатора напряжения
Такие микросхемы с практически идентичными параметрами выпускаются многими фирмами. Применим микросхемы описанные в [11].
а) проверим правильность выбора номинального напряжения на входе стабилизатора (выходное напряжение Ud выпрямителя, рассчитанного в задаче 1). Согласно параметров приведенных в [11], минимальное напряжение между входом и выходом микросхемы стабилизатора (Dropout voltage) равно 2В.
Ud ≥ Uн + 2В + 0,5В (допустимое падение выходного напряжения за счёт пульсаций) = 7,5В, то есть Ud = 8В выбрано верно.
б) проверим допустимость максимального входного напряжения (UХХmax, рассчитанного в задаче 1), оно должно быть ниже Vi (DC input voltage).
UХХmax = 19,5 В ≤ Vi = 35 В, допустимо.
в) проверим допустимость заданного тока нагрузки Iн = 0,1А ≤ (Output current to) 0.5 A, допустимо (если нет используйте [12]).
г) рассчитаем максимальную мощность рассеиваемую интегральным стабилизатором Pmax =(U0*(1+αmax) - Uн )* Iн = 9.41В*(1+0,1)*0,1А = 0,535 Вт.
д) рассчитаем максимально допустимое тепловое сопротивление между полупроводниковым переходом и окружающей средой, что необходимо для выбора конструктивного исполнения (типа корпуса) интегрального стабилизатора и размера радиатора (при необходимости).
RthJA ≤ (TOPmax – TJAmax)/ Pmax = (150°C - 55°C)/0,535Вт = 177,6°C/Вт.
Температура окружающей среды TJAmax выбрана равной 55°C, учитывая требования Правил Регистра максимальной температуры 45°C для обычных помещений судов с неограниченным районом плавания. Запас в 10°C взят на то, что температура вблизи греющихся радиоэлементов выше, чем в помещении. Надо помнить, что для обеспечения работоспособности тепловыделяющих радиоэлементов в компактной аппаратуре может потребоваться её принудительная вентиляция. По справочным материалам [11] видно, что этому условию отвечают стабилизаторы в корпусах TO-220, TO-220FP и DPAK, но не подходит корпус IPAK.
|
|
|
е) Учитывая полученные результаты, выбираем интегральный стабилизатор L78M05CVб L78M05CP L78M05CDT-TR без радиатора.
[для других вариантов исходных данных неравенство пункта д) может быть невыполненным для всех типов корпусов ИС. В этом случае следует использовать радиатор. Требуемое тепловое сопротивление радиатора нужно рассчитать по формуле
RthK ≤ (TOPmax – TJAmax)/ Pmax - RthJC, где RthJC – приведенное в справочных материалах тепловое сопротивление переход – корпус для выбранного интегрального стабилизатора. Затем по полученной величине RthK выбираем, например из каталога [14], подходящий к корпусу стабилизатора радиатор (рекомендую имеющиеся в продаже на Украине PR 19/20/SE, PR 19/35/SE, PR 26/30/SE 1X3,2, PR 29/35/SE, PR 32/25,4/SE, PR 90/37,5/SE/UL)]
|
|
|
ж) Рассчитаем КПД стабилизатора в номинальном режиме
КПД = (Uн* Iн)/(Ud*( Iн + Id)) = (5*0,1)/(9,41*(0,1+0,006)) ≈ 0,5 (≈50%)
где Id – ток потребляемый самим интегральным стабилизатором (Quiescent current).
Расчёт импульсного стабилизатора напряжения.
Импульсные стабилизаторы бывают:
- понижающие (Step–Down Converter) когда входное напряжение выше выходного;
- повышающие (Step–Up Converter) когда входное напряжение ниже выходного;
- инвертирующие (Voltage Inverting Converter) когда выходное напряжение отрицательное при входном положительном. Эти схемы называются также DC/DC преобразователями, поскольку могут использоваться для преобразования питающего напряжения от одного значения к другому. Стабилизатор же можно рассматривать, как частный случай преобразования нестабильного входного напряжения в стабильное выходное. Строятся такие преобразователи на основе специальных управляющих микросхем (DC–to–DC CONVERTER CONTROL CIRCUITS) в состав которых, как правило, входят и силовые ключи достаточные для преобразователя мощностью несколько Вт. При решении данной задачи предлагается использовать микросхему МС34063 [5], которая производится несколькими фирмами, недорога, хорошо себя зарекомендовала и позволяет построить преобразователи всех трёх видов.
|
|
|
Используем взятые из [13] формулы расчета этих преобразователей и их схемы электрические принципиальные всех трёх разновидностей импульсных стабилизаторов. Оформляя решение задачи, используйте только одну схему (в соответствии с вариантом), исправив в неё номиналы элементов по результатам выполненного расчёта. Желательно так же привести обозначения радиоэлементов (резисторов) в соответствие со стандартом [8]. В выше приведенной таблице использованы следующие обозначения:
Таб 2.1. Расчётные формулы
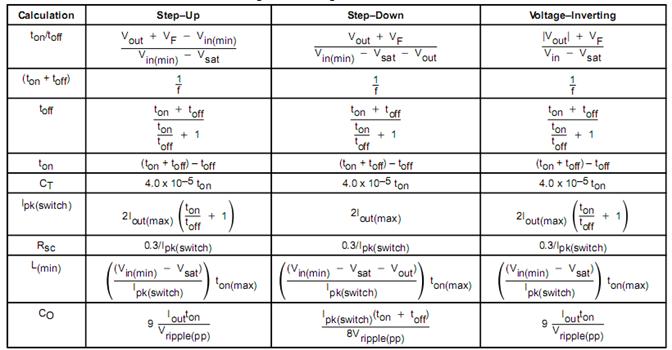
В приведенной таблице использованы следующие обозначения:
Vsat ( Saturation voltage of the output switch) - напряжение насыщения выходного ключа, примерно составляет 0,7В для повышающего преобразователя и 1,3В для остальных схем и может быть уточнено по [9];
VF ( Forward voltage drop of the output rectifier) – прямое падение напряжения на импульсном диоде, примерно 0,4В для диода Шотки;
Vin ( Nominal input voltage) – номинальное значение входного напряжения, ранее по тексту U0;
Vin(min) – минимальное значение входного напряжения, ранее по тексту Ud;
Vout (Desired output voltage) – требуемое выходное напряжение, ранее по тексту Uн;
Iout ( Desired output current) - требуемый выходной ток, ранее по тексту Iн;
|
|
|
Vripple(pp) (Desired peak-to-peak output ripple voltage) – расчётное значение пульсации выходного напряжения от пика до пика;
Ipk(swilch) – пиковый ток выходного ключа;
ton – время пребывания выходного ключа в открытом состоянии;
toff – время пребывания выходного ключа в закрытом состоянии;
f – частота преобразователя;
CT – ёмкость времязадающего конденсатора;
CO - ёмкость выходного конденсатора;
RSC – величина токоизмерительного резистора;
L(min) – минимально допустимая величина индуктивности силового дросселя.
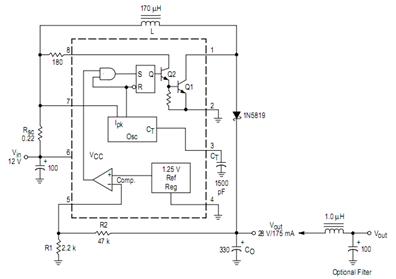
Рис 2.1. Повышающий преобразователь.
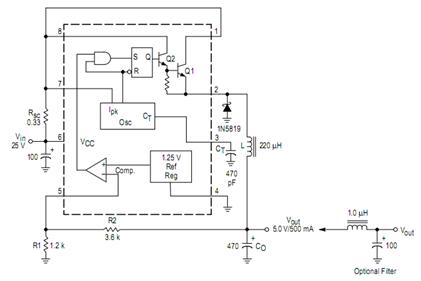
Рис. 2.2. Понижающий преобразователь.
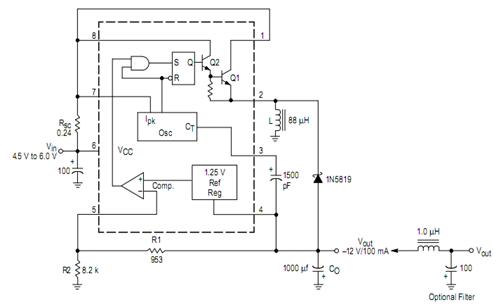
Рис. 2.3. Инвертирующий преобразователь.
Перейдём теперь непосредственно к расчёту импульсного стабилизатора (в примере понижающий преобразователь), считая, что он питается от рассчитанного в задаче 1 выпрямителя:
з) ton / toff = (Vout + VF)/(Vin(min) - Vsat - Vout) = (Uн + VF)/( Ud - Vsat - Uн) = (5В +0,4В)/(8В – 1,3В – 5В) = 3,18.
и) Выберем частоту преобразователя. Рекомендуется:
f = 33 кГц, или ton + toff = 1/f = 30 мкс. Большая частота преобразования позволяет уменьшить величины дросселя и выходного конденсатора, но приводит к росту коммутационных потерь и некоторому снижению КПД. На меньшей частоте значительно увеличиваются габариты конденсатора и дросселя. При выборе частоты учитывают так же, влияние наводок от неё (и её гармоник) на питаемое и близко расположенные радиоэлектронные устройства;
к) toff = (ton + toff)/( ton / toff + 1) = 30 мкс/(3,18 + 1) = 7,18 мкс;
л) ton = (ton + toff) - toff = 30 мкс – 7,18 мкс = 22,82 мкс;
м) CT = 4.0 x 10–5 ton = 91,28 х 10-11 ≈ 910 пФ;
н) Ipk(swilch) = 2* Iout(max) = 2*Iн = 0,2 А, проверяем, что полученное значение меньше ISW, который для МС34063 равен 1,5 А. На это ток подмагничивания должен быть рассчитан дроссель, индуктивность которого определяем;
о) L(min) = (Vin(min) - Vsat - Vout)* ton(max)/ Ipk(swilch) = (8В – 1,3В – 5В)*22.82 мкс/0,2 А = = 194 мкГн, выбираем подходящий дроссель из каталога одного из доступных поставщиков, например [15]. Допустим RLB0608-221KL, но лучше с запасом по току RLB0812-221KL или RLB0912-471K (Дроссель - L=470uH +/-10%, Idc=0.3A, R=1.7 Ohm, Q=25@f=796kHz, SRF=2.9MHz, d=8.7mm, h=10mm, Rm=5mm, -20 to +80C, выводной с радиальными выводами);
п) RSC = 0,3 В/ Ipk(swilch) = 0,3 В/0,2 А = 1,5 Ом;
р) задаёмся Vripple(pp) = 20 мВ и находим
CO = Ipk(swilch)* (ton + toff)/(8* Vripple(pp)) = 0,2А*30 мкс/(8*20 мВ) = 37,5 мкФ, выбираем электролитический конденсатор 47 мкФ на 10В;
с) наконец (и самое главное) определим номинал резистора обратной связи R2, который и задаёт выходное напряжение. Из соотношения  получим:
получим:
R2 = (|Uн|/ 1,25 B - 1)*R1 = (5 В/1,25 В – 1) *1,2 кОм = 3,6 кОм. Выдерживать соотношение R2/R1 следует максимально точно, поэтому если нужного номинала нет в стандартном ряду, следует изменить R2;
т) выбираем импульсный диод по параметрам Ipk(swilch) = 0,2 A и UXX(max) = 19,5 B, вполне подходит 1N5817;
у) оценим КПД преобразователя, начнём с расчёта потерь в коммутирующих элементах и на питание схемы управления (в номинальном режиме):
потери на активном сопротивлении дросселя rL* Ipk(swilch)2/2 = 0,034 Вт,
потери выходного ключа Vsat* Ipk(swilch)* ton / (ton + toff)/2 = 0,099 Вт,
потери импульсного диода VF* Ipk(swilch)* toff / (ton + toff)/2 = 0,010 Вт, питание схемы управления ICC*U0 = 4 мА*9,41 В = 0,038 Вт,
делитель обратной связи Uн2/(R1 + R2) = 0,005 Вт.
Суммарные потери (без учёта потерь на фронтах импульсов) 0,186 Вт, а КПД = 5 В*0,1 А/(5 В*0,1 А + 0,186 Вт) ≈ 0,72 (≈72%);
ф) вычерчиваем схему рассчитанного стабилизатора
Рис. 2.4. Схема электрическая принципиальная рассчитанного импульсного стабилизатора (преобразователя) напряжения.
Практическое занятие №4.
Тема занятия: Расчет преобразователя сигнала датчика к стандартному интерфейсу 4-20 мА.
Цель занятия: Ознакомление с расчётом схем на операционных усилителях на примере преобразователя сигнала датчика к стандартному интерфейсу 4-20 мА.
На этом практическом занятии ознакомимся с:
- возможностью путём построения соответствующих цепей обратной связи получить от схемы усиления выходной сигнал нужного вида. В данном случае выходным сигналом будет потребляемый преобразователем ток;
- преобразованием сигналов датчиков самых разных физических величин к одному аналоговому интерфейсу, который широко используется в судовом и общепромышленном оборудовании;
- расчётом (на примере суммирующего усилителя) схем обработки сигналов на основе операционных усилителей;
- методами питания и подключения датчиков различных фирм;
- одним из способов введения схему преобразователя регулировок смещения нуля и коэффициента передачи.
Рис. 4.1. Схема электрическая принципиальная преобразователя.
Схема электрическая принципиальная рассчитываемого преобразователя приведена на рис. 4.1. На этом же рисунке показано включение датчика температуры для измерения как отрицательных (по Цельсию), так и положительных температур взятое из [23] (figure 7). В зависимости от варианта тип датчика и/или его подключение, как правило, потребуется изменить, взяв необходимые данные из справочных материалов, ссылки на которые в Интернете Вы найдёте в списке литературы.
Начнём с описания состава и назначения отдельных узлов схемы.
1) Узел питания состоит из интегрального регулируемого стабилизатора напряжения DA3 [17], необходимых для его работы и подавления высокочастотных помех в линии связи конденсаторов C1,C3 и делителя R7,R11, задающего выходное напряжение. Этот узел питает как датчик (через контакты подключения Х1 и Х4), так и операционный усилитель.
2) Выходной регулирующий элемент VT1 обеспечивает (под управлением операционным усилителем DA2), требуемый ток потребления схемы, который и является информационным сигналом интерфейса. Регулирующий элемент подключен, через токоограничивающий резистор R12, к выходу стабилизатора, хотя мог бы соединяться непосредственно с положительной клеммой интерфейса Х5. Такое решение позволяет использовать низковольтный транзистор и упрощает ограничитель тока до одного резистора, но требует увеличения допустимой мощности рассеяния стабилизатора.
3) Роль регулируемого токоизмерительного резистора для получения отрицательной обратной связи по потребляемому току играет цепочка R9, R13 и RP2. Изменение RP2 позволяет подстраивать коэффициент передачи на ±17% при расчётном значении токоизмерительного резистора Rт = R9 + R13/2 = 51 Ом. Показанное построение этой цепи связано с отсутствием достаточно надёжных и стабильных низкоомных подстроечных резисторов.
4) Резисторы R2-R6, R8, R10 и RP1 образуют входные цепи суммирующего операционного усилителя. R5, R6 задают рабочую точку (обычно половина напряжения питания при однополярном питании). R2, R8, R10 и RP1 обеспечивают его балансировку, причём с помощью RP1 можно регулировать смещение нуля. R3 и R4 входные резисторы устанавливающие требуемый коэффициент передачи сигнала с дифференциальных входов Х2 и Х3.
5) Конденсатор С2 задаёт быстродействие преобразователя и препятствует его самовозбуждению.
Дальше приводится расчёт преобразователя по следующим исходным данным:
- измеритель температуры в диапазоне -50..150°С;
- датчик LM35A.
При расчете и анализе работы схем на ОУ следует пользоваться следующими правилами:
· Напряжение между входами ОУ практически равно нулю;
· Входы ОУ практически не потребляют тока;
· Суммарная проводимость всех сопротивлений подключенных к инвертирующему входу (эквивалентное сопротивление источника сигнала) должна быть равна суммарной проводимости всех сопротивлений подключенных к неинвертирующему входу;
· В расчёте рабочей точки усилителя можно не учитывать входные резисторы (R3 и R4), если выполнено предыдущее правило.
Последнее правило ОБЯЗАТЕЛЬНО для суммирующего усилителя, использованного в данной схеме. Для других видов усилителей (например буферного усилителя) оно может быть не обязательным, но желательно для снижения погрешности.
Обозначим Rо эквивалентное сопротивление отрицательной обратной связи (последовательное соединение части RP1, R10 и параллельных частей RP2). А через Rс обозначим сопротивление смещения, эквивалент R2, R8 и другой части RP1. А через I0 ток интерфейса соответствующий нулевому сигналу на выходе датчика.
Тогда из приведенных правил можно вывести следующие соотношения:
Uсм = Uп R6/(R5 + R6) = (Uп + Rт I0) Rо/( Rо + Rс), 4.1
преобразовывая получим
 4.2
4.2
при R5 = R6 упрощается до  ; 4.3
; 4.3
 ; 4.4
; 4.4
Для дифференциального усилителя R3 = R4 и
 , 4.5
, 4.5
где  - изменение напряжения между клеммами Х2 и Х3 (сигнал с датчика),
- изменение напряжения между клеммами Х2 и Х3 (сигнал с датчика),
 - соответствующее изменение выходного тока.
- соответствующее изменение выходного тока.
Перейдём непосредственно к расчёту:
a) Выбор операционного усилителя (ОУ). По этому вопросу написаны тома литературы, но в наше время большую часть практических задач позволяет решить почти любой современный ОУ. В первую очередь обратите внимание на низковольтные ОУ с однополярным питанием. Они наиболее дешевы и имеют неплохие характеристики, например [19]. Не следует использовать несовершенные и дорогие классические ОУ кочующие из одного классического учебника в другой ещё с конца прошлого века. Не рекомендуется и ориентироваться на данные радиолюбительских сайтов. Можно посмотреть, что завозят на Украину солидные фирмы поставщики компонентов, их аналитики обычно отбирают лучшее. Поскольку в данной задаче потребление ОУ может оказаться критическим, а быстродействие не требуется (датчики в большинстве своём крайне инерционны) не нужно выбирать скоростные ОУ. ОУ с напряжением питания более 5В (например [20]) следует использовать, только если датчику необходимо большее напряжение питания. Если оценка погрешностей вносимых ОУ покажет его непригодность, используйте более точные (и дорогие) ОУ, например [21,22]. Приняв решение о замене ОУ, заново оцените погрешность и проверте допустимость потребления питания. Остальные пункты расчёта проверять не нужно. Помните, что датчики (кроме некоторых датчиков температуры) обычно дороги, и цена комплектующих преобразователя по сравнению с ними не велика. Предварительно выбираем ОУ AD8541 и напряжение питания Uп = 5В.
b) Проверяем допустимость суммарного потребления питания элементами схемы. Поскольку минимальная измеряемая величина должна соответствовать току потребления преобразователем 4 мА, общее потребление его узлов, при закрытом VT1, должно быть меньше этой величины.
- ток потребления DA3 (Adjustment Pin Current в его описании) = 100мкА;
- ток потребления ОУ (supply current) = 45 мкА;
- ток потребления его входных цепей ≈ Uп/(R2║ R5║ R6║R10) ≈ 5В/100кОм= 50 мкА;
- ток потребления датчика (Quiescent Current) 160 мкА;
- ток резистора R1 (смещение датчика) 50 мкА (см. figure 2 [23]).
Сумма ≈ 400 мкА, что много меньше 4 мА. Построение преобразователя возможно. Делая этот вывод нельзя забывать о цепочке R7 и R11. о них следующий пункт.
c) Расчет стабилизатора напряжения. Ток резистора R11 следует выбирать возможно большим. Это позволит снизить номинал R7, а значить и нестабильность напряжения на нём, которая возникает за счёт Adjustment Pin Current Change = 5 мкА. Напряжение питания равное напряжению на этом резисторе плюс 1,25В, в этой схеме выполняет функции опорного напряжения, а значит непосредственно сказывается на погрешности преобразователя. Выберем ток R11 несколько меньше чем 4мА-400 мкА, а именно 3 мА.
Тогда R11=1,25В/3 мА ≈ 430 Ом. R7=( Uп /1,25В – 1) R11 ≈ 1,3 кОм.
d) Токоограничительный резистор R12= Uп /20 мА = 250 Ом ≈ 240 Ом.
e) Выбираем рабочую точку ОУ (напряжение на его входах при нулевом сигнале с датчика) равной половине питания. Тогда R2 = R6. Номинал этих резисторов должен быть достаточно велик, чтобы не нагружать датчик и не потреблять излишний ток от источника питания. В то же время чрезмерные резисторы увеличивают погрешности, вызванные входным током ОУ. В старой литературе рекомендовалось выбирать их, исходя из нагрузочной способности ОУ. Совет совершенно неприемлемый для современных ОУ, имеющих очень малые входные токи. Можно выбрать резисторы так, чтобы погрешности от дрейфа смещения нуля по напряжению и дрейфа входного тока примерно совпадали.
R2 ≈ Offset Voltage Drift/Offset Current Drift = (4 μV/°C)/(25 fA/°C) = 160 МОм. Такой номинал слишком велик, что может вызвать увеличение погрешностей из за утечек по загрязнениям монтажной платы и теплового шума резисторов. Выберем R2 = R6 = 100кОм.
f) Обозначим Ин, Ив и И0, соответственно нижний, верхний пределы измеряемой величины и значение измеряемой величины при котором напряжение на дифференциальном выходе датчика равно нулю. Значение И0 может лежать вне рабочего диапазона, и даже быть физически недостижимым (получается экстраполяцией характеристики датчика). В расчётном примере Ин = -50, Ив = 150 и И0 = 0.
I0 = 4 мА + 16 мА * (И0 - Ин)/ (Ив - Ин) = 8 мА.
Замечание: I0 может лежать вне диапазона 4-20 мА и даже быть отрицательной величиной. Для недифференциальных датчиков И0 равно значению измеряемой величины, напряжение соответствующее которой подано на клемму Х2.
g) Учитывая, что R5 = R6 и помножив обе части формулы 4.4 на Rс получим
 . Подставляем в это выражение формулу 4.3, тогда
. Подставляем в это выражение формулу 4.3, тогда
 и наконец (разделив на 2 и умножив на R6)
и наконец (разделив на 2 и умножив на R6)
 =100кОм
=100кОм  =108 кОм.
=108 кОм.
Выбираем R10, которое составляет большую часть Rс, R10 = R6 = 100 кОм и получим (при среднем положении движка RP1) RP1 = 2(Rс – R10) = 16 кОм.
h) Из 4.3 находим
 =
=
= 108 кОм  = 92,85 кОм.
= 92,85 кОм.
R8 =  = 662 кОм ≈ 680 кОм.
= 662 кОм ≈ 680 кОм.
i) Рассчитаем входные резисторы:
= 20 мА – 4 мА = 16 мА;
= k(Ив - Ин),
где k = 10,0 mV/˚C – чувствительность датчика (Sensor Gain).
Из 4.5 имеем R3 = R4 = Rо k(Ив - Ин)/( Rт*16 мА) = 227 кОм ≈ 220 кОм.
j) Постоянная времени усилителя C2R5/2 = 5 мс, что много меньше постоянной времени датчика (2 с при высокой скорости обдува). С другой стороны полоса пропускания ОУ (Wide bandwidth) 1 МГц, что много выше полосы пропускания преобразователя, заданной С2. Значить самовозбуждения схемы можно не опасаться. (Современные ОУ имеют внутреннюю коррекцию, препятствующую их самовозбуждению, но на неё можно полагаться, только если не дополнять ОУ добавочными каскадами, которым в нашем случае является VT1.)
k) Оценим погрешность, вносимую преобразователем. Влияние напряжения смещения ОУ и входного тока компенсируется при балансировке преобразователя с помощью RP1. Сравнивая данные из [19] и [23] видим, что шум ОУ на порядок меньше шума датчика, а значить его можно не учитывать. Согласно пункту е) резисторы выбраны много меньше тех, при которых оказывает влияние дрейф входного тока. Остался дрейф напряжения смещения ОУ во времени и при изменении температуры. По первому фактору данных нет, оценим второй. В рабочем диапазоне температур от -20°С до +55°С (согласно требований Регистра) дрейф составит 4 мкВ/°С*(55°С+20°С) = 300 мкВ. Это соответствует ошибке в измеряемой величине (температуре датчика) ∆Т = 300 мкВ / k = 0,03°С, что заметно меньше погрешности собственно датчика, которая составляет не менее 0,1°С. Таким образом ОУ выбран правильно.
l) Все резисторы, кроме R1, R12, RP1 и RP2, должны быть прецизионными. Желательно (но не обязательно) оценить ошибку, возникающую при отклонении резисторов от номинала.
Практическое занятие №5.
Тема занятия:Анализ временных диаграмм датчиков с цифровыми последовательными интерфейсами.
Цель занятия: Ознакомиться со схемами подключения датчиков с цифровыми последовательными интерфейсами к микроконтроллерам. Научиться анализировать временные диаграммы работы датчиков с интерфейсами I2C и SPI.
Вначале вычертить фрагмент схемы электрической принципиальной, отображающий подключение ИС датчика (таймера, памяти, расширителя ввода/вывода) к микроконтроллеру. На схеме необходимо показать:
- Необходимые элементы обвески подключаемой ИС, например кварцевый резонатор для таймера;
- Соединение с землёй или питанием входов, задающих адрес подключаемой ИС на шине, если таковые имеются (соединение произвольное, но затем учитывается при построении временных диаграмм);
- подключение выводов, ограничивающих функционирование ИС (запрет записи в память и т.п.), при котором они находятся в пассивном состоянии и не вносят ограничений в работу;
- Соединение выводов интерфейса с соответствующими выводами произвольного (по выбору курсанта) микроконтроллера.
Обычно чем меньше проводов в интерфейсе, тем сложнее его протокол. Получить основной параметр (время с таймера, влажность с датчика влажности) обычно проще, чем вспомогательный (содержание ячеек вспомогательной памяти таймера или температуру
Рис. 5.1. Подключение датчика влажности.
с датчика влажности). Поэтому для примера рассмотрим сложный случай считывания с датчика влажности с интерфейсом I2Cтемпературы этого датчика (нужна для его коррекции). Пусть Тдат = 70°С. Фрагмент схемы для этого случая показан на рис. 5.1.
Рассчитаем код, который ожидается получить от датчика при заданных условиях. Из технического описания датчика [6 или 7] имеем:
Тдат (°С) =  отсюда
отсюда
Код = (Тдат + 40)(214 – 1)/165 = 110*16383/165 = 10922 = 0х2ААА.
На требуемой диаграмме следует отразить минимально необходимую для получения заданной информации последовательность сигналов. Например, не следует выполнять передачу команд установки режима подключенной ИС, если можно воспользоваться режимом по умолчанию, который устанавливается при появлении питания ИС. Под отдельными интервалами диаграммы следует указать выполняемые действия. Обычно временная диаграмма сигналов обмена с датчиком по последовательному интерфейсу состоит из следующих участков:
1) Старт – начало обмена;
2) Адресация пассивного устройства (рассматриваемой нами подключенной ИС – датчика) на запись;
3) Передача команды или последовательности команд;
4) Передача адреса регистра или ячейки памяти (возможно несколько байт);
5) Передача информации записываемой в регистр, ячейку памяти или их последовательность;
6) Стоп – завершение этапа последовательности обмена по интерфейсу I2C(не всегда необходимо, в интерфейсе SPIне встречается);
7) Если необходимо временной интервал на выполнение измерения, записи в память или других заданных действий (на диаграмме показать разрывом с указанием длительности);
8) Повторный старт (в интерфейсе SPIне встречается);
9) Адресация пассивного устройства на чтение;
10) Приём информации (возможно последовательности байт);
11) Стоп – завершение обмена.
Отдельные пункты приведенного выше списка могут отсутствовать. Их необходимость и содержание выясняйте по техническому описанию заданной подключенной ИС (столбец Лит. Таблицы вариантов). Пункты 7-11 или вся последовательность могут повторяться, если в принятой информации содержится признак её недостоверности. На рисунке лучше вводить небольшой интервал между обменом отдельными байтами (как обычно и бывает на практике), тогда диаграмма легче читается. Не забывайте, что в интерфейсе I2C за каждым байтом следует бит подтверждения со стороны приёмника, то есть на один байт приходится 9 тактовых импульсов.
Рис. 5.2. Временная диаграмма обмена сигналами с датчиком влажности.
В рассматриваемом примере адресация датчика на запись сама по себе является командой начать измерение, а с датчика всегда поступают 4 байта информации – биты состояния, код влажности и, наконец, код температуры. Поэтому пункты 3-5 исключаются. Приём информации можно прервать, что полезно, если биты состояния указывают на её недостоверность. В приводимой диаграмме задержка между подачей команды и первой попыткой приёма информации выбрана заведомо недостаточной, поэтому информация поступает с признаком недостоверности. Во второй попытке принята достоверная информация. Поскольку в данном примере (в отличии от задания вариантов 9 и 10) код влажности нас не интересует, он принят равным 0х35А5. На диаграмме красным цветом выделены моменты, когда информация поступает с подключенной ИС датчика на микроконтроллер, и последний работает в режиме приёмника. Такое выделение курсантам делать не обязательно. Диаграмма может быть одноцветной.
Теперь рассмотрим пример построения временной диаграммы обмена по интерфейсу SPI. Требуется построить временную диаграмму обмена сигналами по цифровому интерфейсу с микросхемой FLASH памяти, используемой, например, для хранения констант калибровки датчиков. Рассмотрим запись информации в память с интерфейсом SPI. Фрагмент схемы для этого случая показан на рис. 5.3.
Рисунок 5.3. Подключение SPI памяти.
Если предположить, что запись в нужную область памяти не блокировалась, а значить и разблокировать её не нужно, то на микросхему следует подать следующие коды:
o 0х06 – обязательная команда разрешения записи (после включения устройства или запрещения записи соответствующей командой);
o 0х02 – команда записи (старший бит адреса 0);
o 0х24 – адрес записываемой ячейки;
o 0х77 – записываемый код.
Полученный результат показан на рис. 5.4.

Рисунок 5.4. Временная диаграмма обмена сигналами с памятью при записи информации.
Практическое занятие №6.
Тема занятия:Диагностика, ремонт и модернизация средств автоматики на основе микропроцессоров и однокристальных микроконтроллеров.
Цель занятия: Ознакомление с современными средствами диагностики и ремонта средств автоматики
Предварительный анализ.
Итак, у Вас в руках плата (модуль) микропроцессорного (микроконтроллерного) устройства входящего в состав одного из судовых средств автоматики. Будем надеяться Вы впервые взяли её в руки, когда она ещё исправна. Как мы увидим дальше, большинство методов диагностики и ремонта требуют не только теоретической подготовки и изучения соответствующих схем и особенностей комплектующих изделий, но и навыков работы со специальным оборудованием и заполнения пробелов в эксплуатационной документации. Последнее, как правило, невозможно при отсутствии годного экземпляра точно такой же (а не аналогичной) платы.
На плате обычно можно выделить следующие разновидности узлов:
Ø узлы питания;
Ø узлы согласования электрических параметров на входе и выходе;
Ø микропроцессорное ядро;
Ø узлы дополнительной обработки сигнала и расширения функций ядра.
Диагностику следует начинать с узлов питания, которых в современных устройствах обычно несколько. Каждый из них следует проверить сначала осциллографом (функционирование и отсутствие пульсаций), а затем тестером на точность выходного напряжения. На данном этапе можно обойтись без осциллографа, оценив пульсации тестером в режиме измерения переменного напряжения (включать через конденсатор).
К узлам согласования относятся полупроводниковые ключи (транзисторы, тиристоры), реле, оптроны, схемы согласования уровней сигнала (например: интерфейсов RS232, RS422 и RS485). Для их проверки, как правило, достаточно тестера и простейших схем подпитки входов и выходов. После подачи соответствующего сигнала на вход платы выход узла согласования (вход микроконтроллера) проверяется тестером. На вход выходного узла согласования сигнал, как правило, подаётся с порта, работающего в режиме открытого коллектора (проверить по схеме). В этом случае запустив в микропроцессорном ядре холостую программу (смотри ниже) можно имитировать сигнал замыканием вывода ядра перемычкой на землю, и проверять работу узлов согласования тестером, обеспечив подпитку выходов. Если на вход узла согласования работает вывод ядра с активной единицей (через резистор на базу транзистора), сигнал с него можно имитировать, включая такой же резистор между базой транзистора и плюсом источника питания процессора.
Наиболее вероятная причина отказа микропроцессорного ядра разрушение информации в ПЗУ. Следует заранее считать и сохранить на надёжном носителе кодировку всех ПЗУ имеющихся в системе, если она не приведена в доступной документации. Только такая мера позволит восстановить или заменить на новую отказавшую микросхему. Признаком отказа микросхемы является повышение её температуры. Современные микроконтроллеры обычно не нагреваются, полезно заранее определить температуру всех микросхем на исправно работающей плате (в крайнем случае пальцем) и записать эти данные для справки. Наконец остаётся проверить все доступные сигналы осциллографом, обращая внимание на уровни логического нуля и единицы и крутизну фронтов.
Узлы последней группы тем многочисленнее, чем старее система, а на современных платах обычно отсутствуют вовсе. Дать точные рекомендации довольно трудно, но предварительную оценку можно провести, как описано в предыдущем случае.
Измерительные приборы.
В наше время тестер стоит от $5 и есть у каждого уважающего себя электрика. Для измерения при диагностике удобнее применять миниатюрные цифровые приборы (можно неповеренные), в отличии от официальных замеров, результаты которых заносятся в судовую документацию. Нельзя надеяться обойтись без осциллографа, причём последний должен быть гальванически развязан от питающей сети. Подойдут ноутбук питающийся от собственной батареи с USB осциллографической приставкой (виртуальный осциллограф), или автономный карманный осциллограф. Стоимость этих приборов ~100$, а внешний вид и краткие технические характеристики приведены ниже.
Oscill - это семейство недорогих эффективных осциллографов с возможностями, перекрывающими большинство потребностей профессиональной и любительской деятельности в электронике, микроконтроллерной технике, связи, электропитании, измерениях...
 Полоса пропускания КВО 15МГц
Полоса пропускания КВО 15МГц
максимальная чувствительность 20мВ/дел
минимальная чувствительность 10В/дел
интерфейс связи с ПК USB/UART
разрядность АЦП 8 бит
объем ОЗУ 2104 байт
в стробоскопическом режиме 800Mвыб/с
частота дискретизации 32Mвыб/с
гальваническая изоляция от ПК 2500 В
скорость соединения с ПК 921кбод
Рис.6.1. Виртуальный осциллограф.
Карманный осциллограф:
Дисплей 2.8″ цветной TFT LCD
Разрешение дисплея 320×240
Количество цветов 65 000
Полоса пропускания 0 — 1МГц
Максимальная частота сэмплирования 2Msps 12бит
Память измерений 4096 точек
Чувствительность по горизонтали 1мкс/дел — 10с/дел (1-2-5 шаг)
Позиция по горизонтали - регулируемая с подвижным маркером
Чувствительность по вертикали 10мВ/дел — 10В/дел (с ×1 щупом)
0,5В/дел — 100В/дел (с ×10 щупом) (переключается)
Позиция по вертикали - регулируемая с индикатором положения
Входное сопротивление >500KΩ
Максимальное входное напряжение 80В (с ×1 щупом)
 Режимы триггера - Auto, Norma, Single, None and Scan
Режимы триггера - Auto, Norma, Single, None and Scan
Рис.6.2. Карманный
Осциллограф.
Функциональность:
- Автозамеры: частоты, периода, скважности. Действующее, амплитудное, среднеквадратичное напряжение.
- Точное измерение по вертикали (маркеры)
- Точное измерение по горизонтали (маркеры)
- Фронт/спад триггер
- Уровень триггера - регулируемый с индикатором
- Чувствительность триггера - регулируемая с индикатором
- Удержание/запуск измеренной осциллограммы.
Пробный сигнал встроенный 10Гц — 1МГц (1-2-5 шаг)
Хранение формы кривой - карты памяти SD
Подключение к USB как SD картридер
Обновление прошивки через bootloader по USB
Источник питания 3,7В литиевая батарея 700мАч, или USB-порт.
Габариты (без щупов) 105 X 53 X 8 мм
Если предварительный анализ не дал результата, следует использовать описанные далее более сложные методы анализа. Среди них наименьшей квалификации оператора требует сигнатурный анализ.
Сигнатурный анализ.
К созданию сигнатурного анализа привела, возникшая более тридцати лет назад, практическая потребность диагностирования сложной цифровой вычислительной техники и измерительных систем. Так выяснилось, что для безошибочного контроля и диагностики появившихся микропроцессорных систем как раз не хватало (!) существовавших ранее классов контрольно-измерительных приборов (вольтметров, частотомеров и т.д.), которые в принципе не годились для контроля сложных цифровых схем.
Аналоговые схемы проверяются путем подачи известных входных сигналов и контроля каждого узла в тракте распространения сигнала с помощью тестера, а при необходимости, и осциллографа. При обнаружении нестандартного сигнала подозрение падает на ту часть схемы, которая управляет узлом, и именно она исследуется более тщательно. В принципе таким же образом можно проверять и цифровые схемы: подавать известные тест-наборы и контролировать каждый узел в тракте распространения сигнала. Однако цифровые системы радикально отличаются от аналоговых систем не только самой природой сигналов, но и наличием гораздо большего числа сигнальных входов. Если бы цифровой системой можно было управлять таким образом, что на всех ее входах действовал четко определенный тест-набор, то каждый узел можно было бы проверить на фиксированный набор событий. В любом узле при каждом выполнении стимулирующей программы возникает один и тот же набор, и его можно использовать для проверки правильной работы узла. Если измеряемый набор отличается от ожидаемого, следует подозревать наличие отказа между данным узлом и стимулируемыми точками системы. При заданном фиксированном тест-наборе измеряемый набор в любом узле оказывается уникальным, и его можно использовать для контроля по принципу “проходит/не проходит”. Измеряемая реакция узла на известные тест-набор называется “сигнатурой” (т.е. подписью) по аналогии с уникальностью рукописных подписей у людей. Рассмотренный принцип лежит в основе целой области цифрового тестирования, называемой сигнатурным анализом.
Этот подход основан на получении меток, которые представляют собой сжатые отображения обычно достаточно длинных последовательностей данных. Устройство, осуществляющее это отображение, должно быть таким, чтобы полученные с помощью него метки, показания и т.п., были бы достаточно информативными и содержали бы по возможности всю  информацию. Наиболее целесообразно метку называть сигнатурой только в том случае, если измерительный прибор, с помощью которого получается эта метка, обладает "перемешивающим" свойством. Оно состоит в том, что при фиксированном начальном состоянии этого прибора “сколь угодно мало” отлучающимся входным процессам будут соответствовать “сильно отличные” финальные состояния (показания прибора после окончании анализа). Свойствами перемешивания обладают те дискретные динамические системы, которые при нулевом входном сигнале могут вести себя подобно генератору псевдослучайных последовательностей сложной формы с очень большим конечным периодом существенно превышающим (!) время эксперимента. Оператору в этом случае, достаточно лишь знать, что совпадает ли замеренная сигнатура с опорной, указанной в документации и в какой точке контролируемой схемы проверять следующую сигнатуру.
информацию. Наиболее целесообразно метку называть сигнатурой только в том случае, если измерительный прибор, с помощью которого получается эта метка, обладает "перемешивающим" свойством. Оно состоит в том, что при фиксированном начальном состоянии этого прибора “сколь угодно мало” отлучающимся входным процессам будут соответствовать “сильно отличные” финальные состояния (показания прибора после окончании анализа). Свойствами перемешивания обладают те дискретные динамические системы, которые при нулевом входном сигнале могут вести себя подобно генератору псевдослучайных последовательностей сложной формы с очень большим конечным периодом существенно превышающим (!) время эксперимента. Оператору в этом случае, достаточно лишь знать, что совпадает ли замеренная сигнатура с опорной, указанной в документации и в какой точке контролируемой схемы проверять следующую сигнатуру.
В циклическом избыточном контроле входной двоичный набор подается в линейную схему, которая осуществляет деление двоичного потока на некоторый характеристический полином, и в регистре сдвига образуется остаток от деления. Обычно остаток добавляется к передаваемому двоичному потоку в качестве кода, обнаруживающего ошибки. Если же вместо добавления остатка к двоичному потоку вывести его на индикацию, это значение будет уникальным для входного двоичного набора. Имея запоминающие элементы, схема учитывает все прошлые и текущие события и может обрабатывать очень длинные потоки данных. Уникальный остаток для конкретного входа служит как бы “отпечатками пальцев” этого набора и может использоваться для его идентификации. Зависимость остатка от входного двоичного потока привела к термину “сигнатура” (т.е. подпись). Фактическое значение сигнатуры несущественно, но оно должно быть одним и тем же для данного узла, когда он стимулируется одним и тем же тест-набором и когда применяется те же самые сигналы пуска, останова и синхронизации.
Для получения наилучших результатов при применении способа регистра сдвига требуется последовательность максимальной длины, что приводит к широкому классу схем, называемых генераторами псевдослучайной последовательности. В 16-разрядном регистре сдвига имеется 2048 способов реализации отводов обратной связи, удовлетворяющих данному критерию. Фирма Hewlett-Packard (родоначальник этого метода) остановилась на нечетном числе входов, применив неприводимое выражение обратной связи X16 + X12 + X 9 + X7 + 1, которое соответствует характеристическому полиному X16 + X9 + X 7 + X4 + 1.
По существу, получается портативный прибор, содержащий 16-разрядный регистр сдвига с сумматором по mod 2 на входе. С помощью сигналов пуска и останова входной сигнал подается в схему, а сигнал синхронизации от проверяемой системы сдвигает данные в регистре. По окончании интервала измерения осуществляется индикация содержимого регистра как характеристической сигнатуры проверяемого узла.
Как правило, в изделия, при эксплуатации которых предполагается использовать сигнатурный анализ, в процессе разработки вносят следующие средства, позволяющие производить этот анализ наиболее простыми и дешевыми приборами и повысить эффективность контроля:
1. Средства, позволяющие разрывать в режиме контроля цепи обратной связи в контролируемой схеме. Когда выходит из строя один из элементов, входящих в контур с обратной связью, локализовать неисправности внутри этого контура с помощью сигнатурного анализа не удается. Что же касается МПС в целом, то она целиком охвачена обратной связью по контуру программного управления. Поэтому для применения сигнатурного анализа необходимо иметь возможность разрывать цепи обратной связи в режиме тестирования МПС. Для однокристального микропроцессора это условие реализуется отключением шины данных от входа МП. Разрыв обратной связи по шине данных можно реализовать с помощью механических переключателей или электронных ключей.
2. Схемы, вырабатывающие сигналы Пуск и Стоп, необходимые сигнатурному анализатору для формирования измерительного “окна”, т.е. интервала времени, в течении которого накапливается сигнатура.
3. Тестовая программа, либо специально разработанная, либо определенная рабочая программа, если она, по мнению разработчика, в достаточной мере использует все устройства МПС.
Увеличение объема аппаратуры и стоимости разработки МПС с учетом требований применимости сигнатурного анализа по сравнению с объемом и стоимостью обычной МПС не превышает в среднем 1%.
Дата добавления: 2018-04-05; просмотров: 366; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!